







可以看到ESO,我觉得你把这个文件夹下的代码弄懂,整个ACfly工程也差不多了。你跟别人讲也讲得清楚。
这么来看
首先main.c里
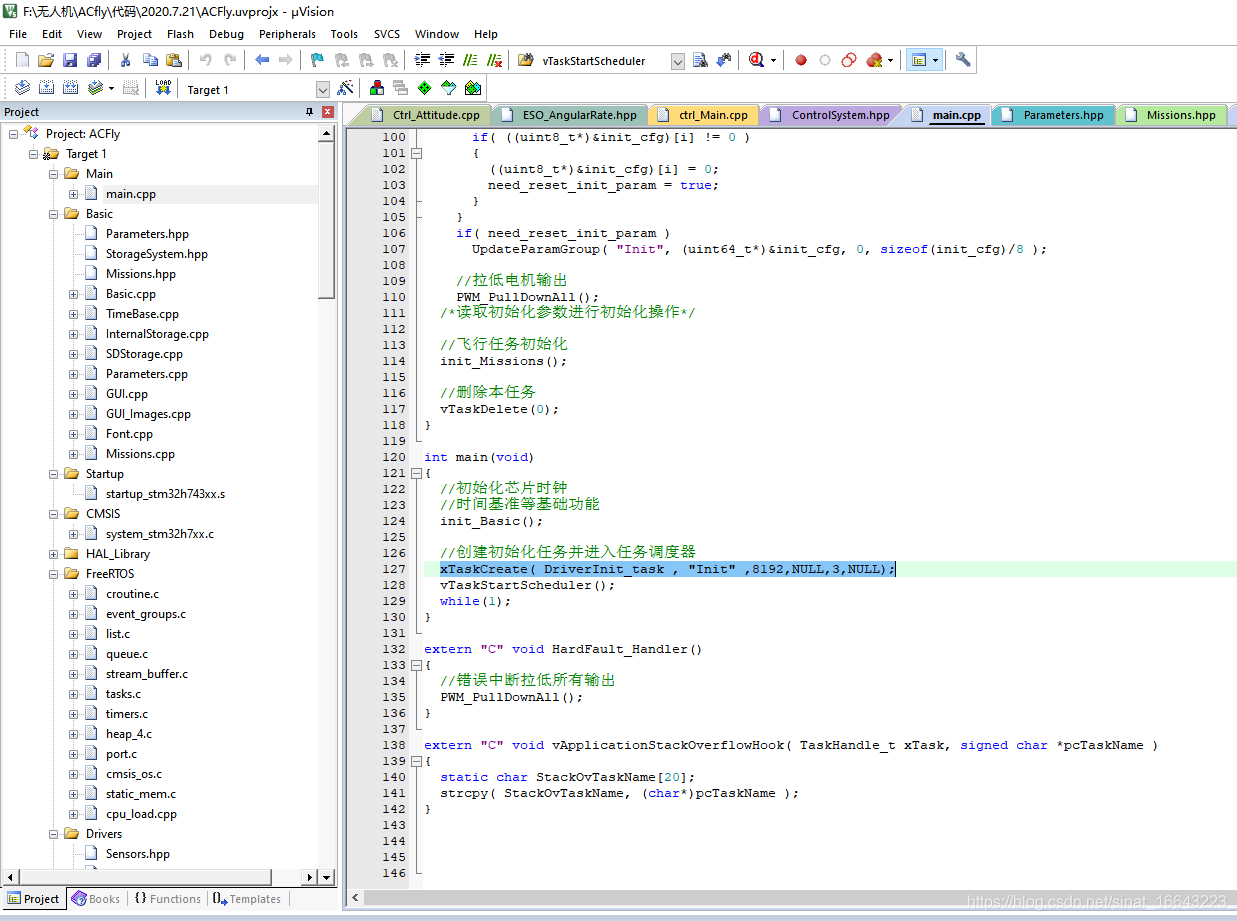
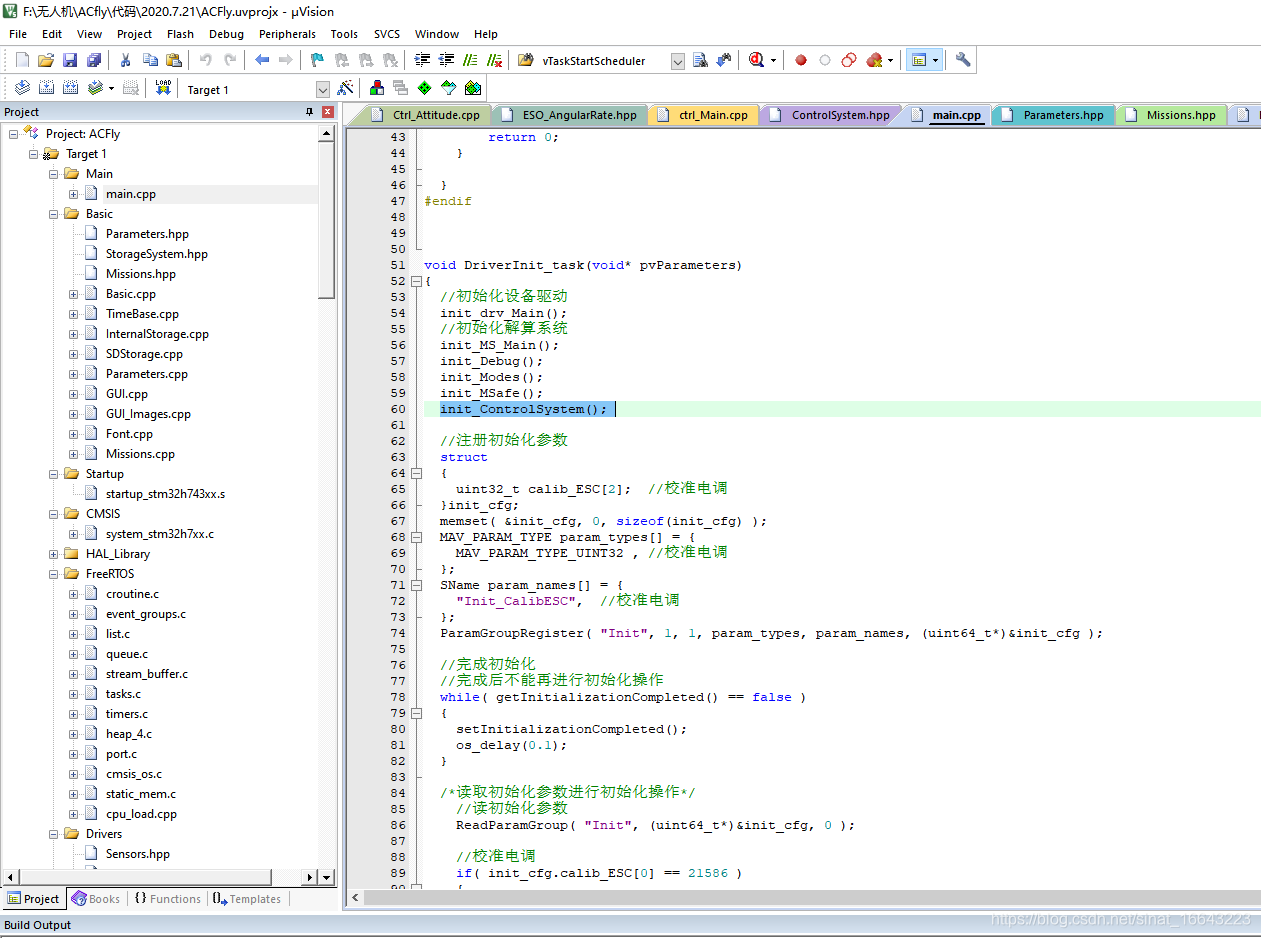
找到 DriverInit_task 函数,就在main.c里面
这个函数里面我本来预计他和正点原子的minifly一样创建很多个任务,但是我并没有发现他在这里面写,都是一些初始化代码,一开始我很困惑,后来我细看,发现一个 init_ControlSystem(); 如下所示
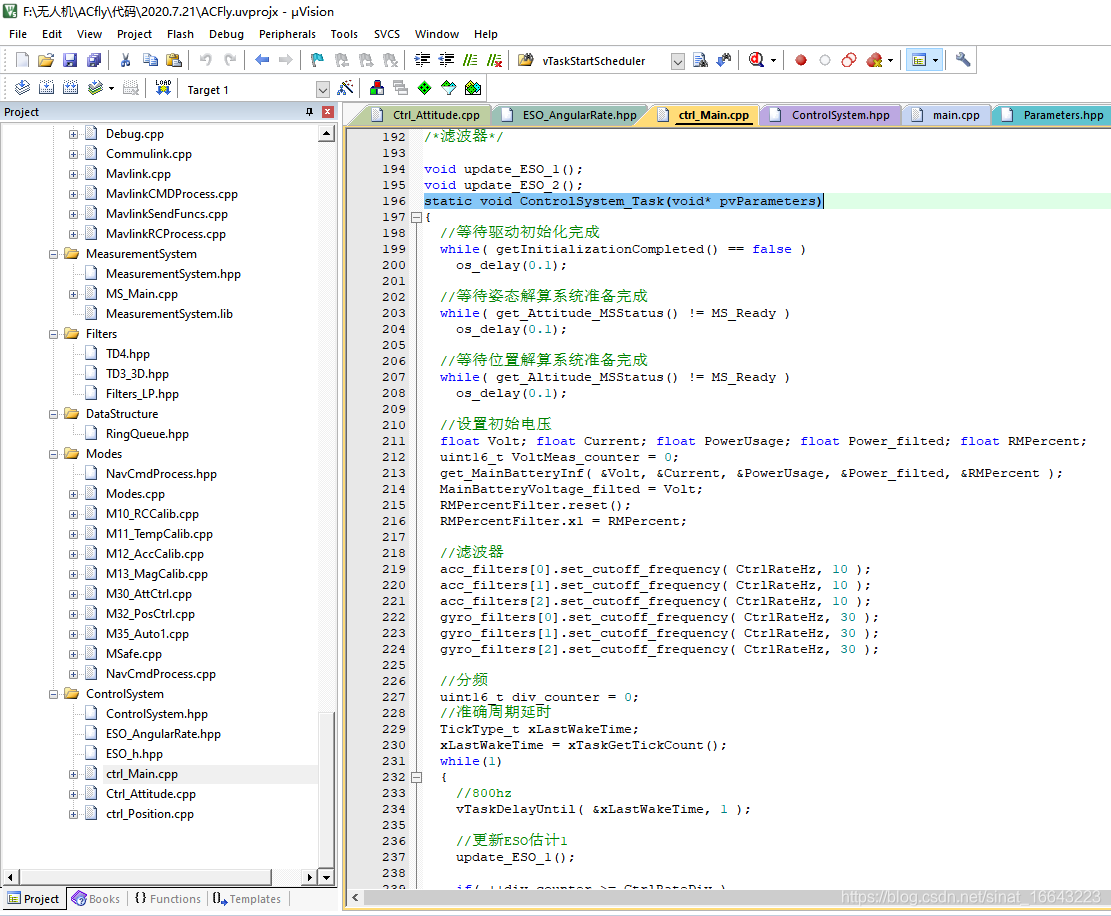
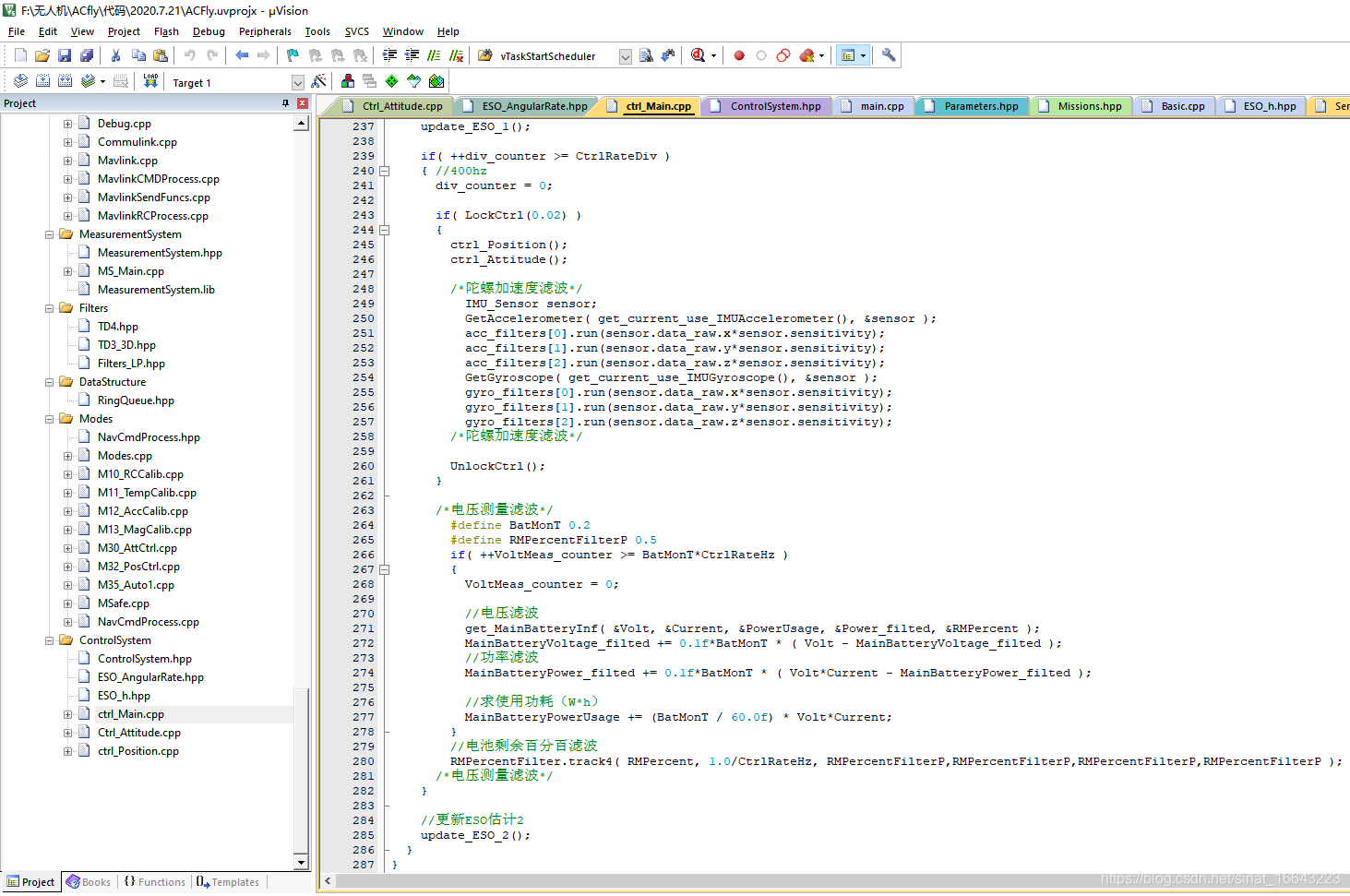
我再找到 init_ControlSystem(); 是在 ControlSystem文件夹下的ctrl_Main.cpp里面,找到这个函数会发现里面有个任务创建函数 xTaskCreate( ControlSystem_Task, "ControlSystem", 4096, NULL, SysPriority_ControlSystem, NULL);
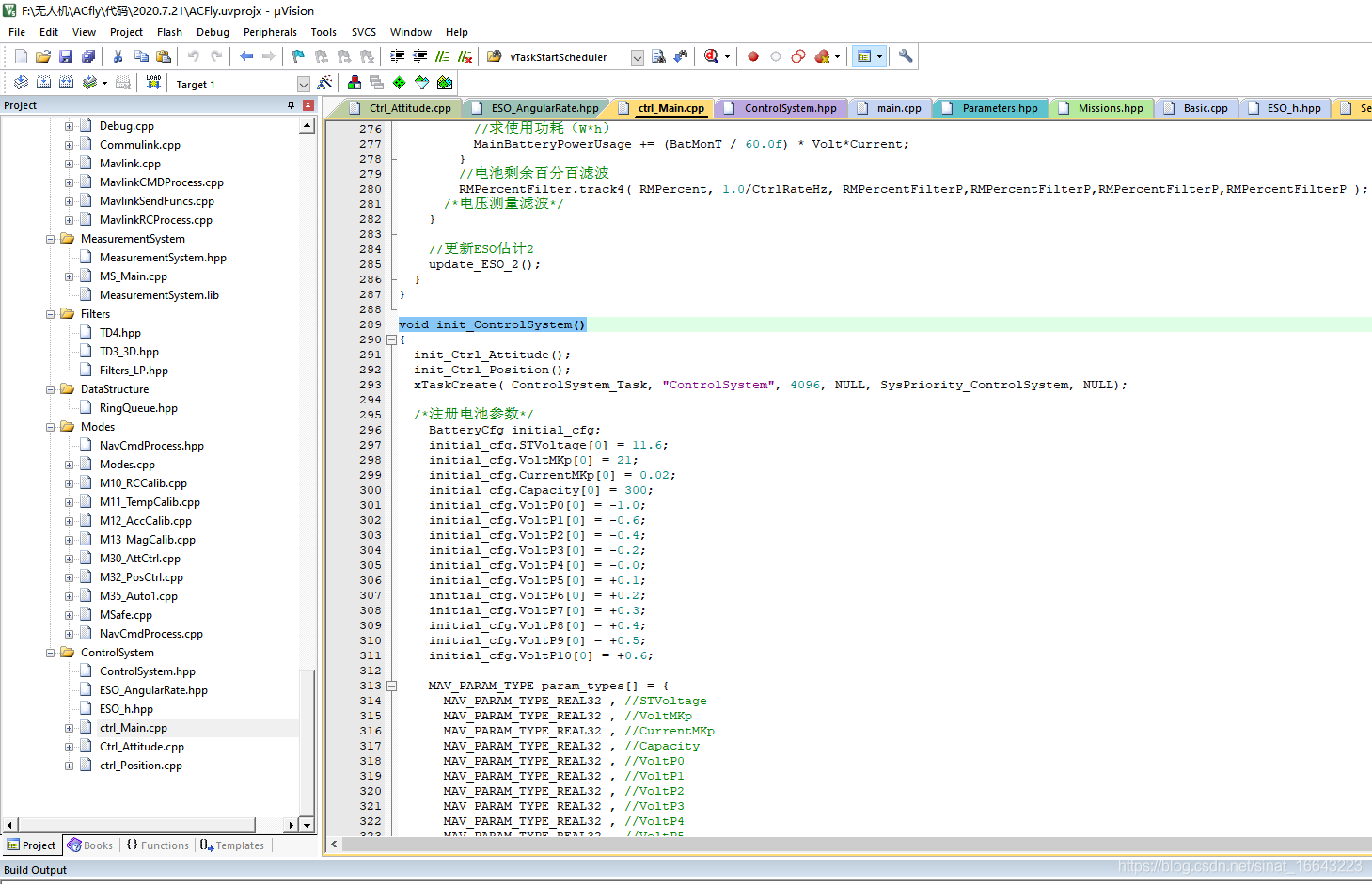
那我们接着找到实际任务执行函数 ControlSystem_Task 也是在这个c文件里面,这样他的核心控制部分的代码就暴露出来了,这也你会这个工程也有个更为清晰的把握。
。


















 1142
1142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











