







ACfly的Ctrl_Attitude.cpp的代码
Attitude是姿势的意思
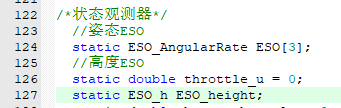
我看有个姿态ESO,实际应该是角速度的,还有个高度ESO
在高度上用ADRC可能是为了高度无参自适应,你每次改变无人机的重量总不可能去手动调无人机的油门值吧?
https://blog.csdn.net/sinat_16643223/article/details/108900353
![]()
我后来也看到,无名的ADRC的方案也是只在角速度环用ADRC,我这两篇博文有写。当然可能ADfly多了个高度环上的ADRC,但是至少在姿态环都是在角速度环用ADRC,莫非角度环如无名所说都是用的P?



难道真的只有角速度的控制?




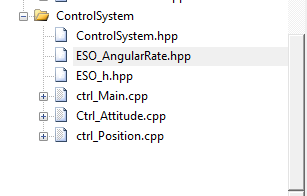
还有专门一个角速度的ESO的头文件。莫非真的只有角速度用了ADRC。
ACfly的这篇博文有对控制算法的介绍,我这里还看到反步控制器,莫非是包含在自抗干扰里面的么?
https://blog.csdn.net/weixin_40767422/article/details/88081309

反步法似乎确实是四旋翼的一种控制方法,这是否就是朱文杰说的单靠ADRC效果也不好。

https://baike.baidu.com/item/%E5%8F%8D%E6%AD%A5%E6%B3%95/22128775?fr=aladdin

好像还真有什么模型自抗扰控制器

基于模型补偿的自抗扰控制系统。

这里也找到一些自抗扰反步控制

https://xueshu.baidu.com/usercenter/paper/show?paperid=1w5v0ax01228087063230m003e345532

这篇文章就说清楚了!!!!!!
韩 京 清[9]提 出 自 抗 扰 控 制 方 法,其中微分跟踪器给出跟踪信号的导数,可以同反步法结合,消 除 非 线 性 函 数重复 微 分 引 起 的“计 算 爆 炸”,同时扩张状态观测器,对系统总扰动进行观测,具 有 更 强 的 鲁 棒 性

#include "ctrl_Attitude.hpp"
#include "ControlSystem.hpp"
#include "ctrl_Main.hpp"
#include "Parameters.hpp"
#include "MeasurementSystem.hpp"
#include "TD4.hpp"
#include "TD3_3D.hpp"
#include "ESO_AngularRate.hpp"
#include "ESO_h.hpp"
#include "Filters_LP.hpp"
#include "drv_PWMOut.hpp"
#include "Receiver.hpp"
#include "StorageSystem.hpp"
/*参数*/
//飞行器类型
enum UAVType
{
UAVType_Rotor4_X = 10 , //四旋翼X型
UAVType_Rotor6_X = 11 , //六旋翼X型
UAVType_Rotor8_X = 12 , //八旋翼X型
UAVType_Rotor4_C = 15 , //四旋翼十字型
UAVType_Rotor42_C = 20 , //四旋翼Double十字型
UAVType_Rotor6_S1 = 32 , //六旋翼异构
};
//控制参数
struct AttCtrlCfg
{
uint64_t UAVType; //机型类型
float STThrottle[2]; //起转油门
float NonlinearFactor[2]; //电机非线性参数
float FullThrRatio[2]; //满油门比例
float T[2]; //惯性时间T
float b[6]; //RPY增益b
float TD4_P1[6]; //RPY前馈TD4滤波器P1
float TD4_P2[6]; //RPY前馈TD4滤波器P2
float TD4_P3[6]; //RPY前馈TD4滤波器P3
float TD4_P4[6]; //RPY前馈TD4滤波器P4
float P1[6]; //反馈增益P1
float P2[6]; //反馈增益P2
float P3[6]; //反馈增益P3
float P4[6]; //反馈增益P4
float beta2[2]; //ESO Beta2
float maxLean[2]; //最大倾斜角
float maxRPSp[2]; //最大Pitch Roll速度
float maxRPAcc[2]; //最大Pitch Roll加速度
float maxYSp[2]; //最大偏航速度
float maxYAcc[2]; //最大偏航加速度
}__PACKED;
//参数
static AttCtrlCfg cfg;
/*参数*/
/*内部接口*/
float get_STThrottle()
{
return cfg.STThrottle[0];
}
float get_maxLean()
{
return cfg.maxLean[0];
}
float get_maxYawSpeed()
{
return cfg.maxYSp[0];
}
/*内部接口*/
/*起飞地点*/
static bool HomeLatLonAvailable;
static bool HomeAvailable;
static vector2<double> HomeLatLon;
static vector2<double> HomePoint;
static double HomeLocalZ = 0;
bool getHomeLocalZ( double* home, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*home = HomeLocalZ;
UnlockCtrl();
return true;
}
return false;
}
bool getHomePoint( vector2<double>* home, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
bool available = HomeAvailable;
if(available)
*home = HomePoint;
UnlockCtrl();
if( available )
return true;
else
return false;
}
return false;
}
bool getHomeLatLon( vector2<double>* home, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
bool available = HomeLatLonAvailable;
if(available)
*home = HomeLatLon;
UnlockCtrl();
if( available )
return true;
else
return false;
}
return false;
}
/*起飞地点*/
/*状态观测器*/
//姿态ESO
static ESO_AngularRate ESO[3];
//高度ESO
static double throttle_u = 0;
static ESO_h ESO_height;
static double hover_throttle = 0;
static double WindDisturbance_x = 0;
static double WindDisturbance_y = 0;
static bool inFlight = false;
static inline void update_output_throttle( double throttle, double h )
{
Quaternion quat;
get_Airframe_quat( &quat, 0.1 );
double output_minimum_throttle = cfg.STThrottle[0];
double lean_cosin = quat.get_lean_angle_cosin();
//观测悬停油门
double r_throttle = throttle - output_minimum_throttle;
if( r_throttle < 0 )
r_throttle = 0;
if( lean_cosin < 0.1f )
lean_cosin = 0.1f;
r_throttle *= lean_cosin;
throttle_u = r_throttle;
ESO_height.update_u(r_throttle);
hover_throttle = ESO_height.get_hover_throttle() + output_minimum_throttle;
//更新飞行状态
static uint16_t onGround_counter = 0;
if( inFlight == false )
{
onGround_counter = 0;
double AccZ = ESO_height.get_force() - GravityAcc;
if( AccZ > 20 && throttle > output_minimum_throttle + 5 )
inFlight = true;
}
else
{
vector3<double> angular_rate;
get_EsAngularRate(&angular_rate);
double rate = safe_sqrt(angular_rate.get_square());
if( hover_throttle<output_minimum_throttle+2 && rad2degree(rate)<10 )
{
if( ++onGround_counter >= 400 )
inFlight = false;
}
else
onGround_counter = 0;
}
//观测水平分力
if( inFlight )
{
vector3<double> AccENU;
get_AccelerationENU_Ctrl(&AccENU);
Quaternion quat;
get_AirframeY_quat( &quat );
vector3<double> active_force_xy_vec = quat.rotate_axis_z();
if( lean_cosin < 0.3f )
lean_cosin = 0.3f;
active_force_xy_vec = active_force_xy_vec *( ( AccENU.z + GravityAcc ) / lean_cosin );
vector3<double> WindDisturbance_xy;
WindDisturbance_xy.x = AccENU.x - active_force_xy_vec.x;
WindDisturbance_xy.y = AccENU.y - active_force_xy_vec.y;
double lp_factor = 2 * Pi * (1.0/CtrlRateHz) * 1.2;
WindDisturbance_x += lp_factor * ( WindDisturbance_xy.x - WindDisturbance_x );
WindDisturbance_y += lp_factor * ( WindDisturbance_xy.y - WindDisturbance_y );
}
else
WindDisturbance_x = WindDisturbance_y = 0;
//更新Home点位置
if( inFlight == false )
{
vector3<double> position;
get_Position(&position);
HomeLocalZ = position.z;
PosSensorHealthInf2 posInf;
if( get_Health_XY(&posInf) )
{
HomeAvailable = true;
HomePoint.x = posInf.PositionENU.x;
HomePoint.y = posInf.PositionENU.y;
}
else
HomeAvailable = false;
if( get_OptimalGlobal_XY(&posInf) )
{
HomeLatLonAvailable = true;
map_projection_reproject( &posInf.mp,
posInf.PositionENU.x+posInf.HOffset.x,
posInf.PositionENU.y+posInf.HOffset.y,
&HomeLatLon.x, &HomeLatLon.y );
}
}
else if( get_Position_MSStatus()!= MS_Ready )
HomeAvailable = false;
}
static double Roll_u = 0;
static double Pitch_u = 0;
static double Yaw_u = 0;
void update_ESO_1()
{
//更新角速度观测器
vector3<double> angular_rate;
get_AngularRate_Ctrl(&angular_rate);
ESO[0].run(angular_rate.x);
ESO[1].run(angular_rate.y);
ESO[2].run(angular_rate.z);
vector3<double> acc;
get_AccelerationENU_Ctrl(&acc);
ESO_height.run( acc.z );
}
void update_ESO_2()
{
ESO[0].update_u(Roll_u);
ESO[1].update_u(Pitch_u);
ESO[2].update_u(Yaw_u);
ESO_height.update_u(throttle_u);
}
/*状态观测器*/
/*观测器接口*/
bool get_hover_throttle( double* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = hover_throttle;
UnlockCtrl();
return true;
}
return false;
}
bool get_throttle_force( double* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = ESO_height.get_force();
UnlockCtrl();
return true;
}
return false;
}
bool get_throttle_b( double* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = ESO_height.get_b();
UnlockCtrl();
return true;
}
return false;
}
bool get_ESO_height_T( double* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = ESO_height.get_T();
UnlockCtrl();
return true;
}
return false;
}
bool get_is_inFlight( bool* result, double TIMEOUT )
{
*result = inFlight;
return true;
}
bool get_WindDisturbance( vector3<double>* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = vector3<double>( WindDisturbance_x, WindDisturbance_y, 0 );;
UnlockCtrl();
return true;
}
return false;
}
bool get_EsAngularRate( vector3<double>* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = vector3<double>( ESO[0].get_EsAngularRate(), ESO[1].get_EsAngularRate(), ESO[2].get_EsAngularRate() );
UnlockCtrl();
return true;
}
return false;
}
bool get_EsAngularAcc( vector3<double>* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = vector3<double>( ESO[0].get_EsAngularAcceleration(), ESO[1].get_EsAngularAcceleration(), ESO[2].get_EsAngularAcceleration() );
UnlockCtrl();
return true;
}
return false;
}
/*观测器接口*/
/*控制接口*/
//期望TD4滤波器
static TD3_2DSL Target_tracker_RP;
static TD4_SL Target_trackerY;
//姿态控制模式
static bool Attitude_Control_Enabled = false;
static Attitude_ControlMode RollPitch_ControlMode = Attitude_ControlMode_Angle;
static Attitude_ControlMode Yaw_ControlMode = Attitude_ControlMode_Angle;
//输出滤波器
static double outRoll_filted = 0;
static double outPitch_filted = 0;
static double outYaw_filted = 0;
static double throttle = 0;
static double target_Roll;
static double target_Pitch;
static double target_Yaw;
static vector3<double> target_AngularRate;
bool is_Attitude_Control_Enabled( bool* enabled, double TIMEOUT )
{
*enabled = Attitude_Control_Enabled;
return true;
}
bool Attitude_Control_Enable( double TIMEOUT )
{
if( get_Attitude_MSStatus() != MS_Ready )
return false;
Quaternion quat;
if( get_Airframe_quat( &quat, TIMEOUT ) == false )
return false;
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == true )
{ //控制器已打开
UnlockCtrl();
return false;
}
//读参数
if( ReadParamGroup( "AttCtrl", (uint64_t*)&cfg, 0, TIMEOUT ) != PR_OK )
{
UnlockCtrl();
return false;
}
/*初始化*/
//读取电池电压
float BatVoltage = get_MainBatteryVoltage_filted();
//计算增益修正系数
double b_scale = 1.0;
if( BatVoltage > 7 )
{
float STVoltage[2];
if( ReadParam("Bat_STVoltage", 0, 0, (uint64_t*)STVoltage, 0 ) == PR_OK )
b_scale = BatVoltage / STVoltage[0];
}
//初始化姿态ESO
ESO[0].init( cfg.T[0], cfg.b[0]*b_scale, 25, cfg.beta2[0], CtrlRateHz*CtrlRateDiv );
ESO[1].init( cfg.T[0], cfg.b[2]*b_scale, 25, cfg.beta2[0], CtrlRateHz*CtrlRateDiv );
ESO[2].init( 1.0/(CtrlRateHz*CtrlRateDiv), cfg.b[4]*b_scale, 25, cfg.beta2[0], CtrlRateHz*CtrlRateDiv );
//初始化高度ESO
ESO_height.init( cfg.T[0], 10, CtrlRateHz*CtrlRateDiv );
//初始化期望TD4滤波器
Target_tracker_RP.P1=cfg.TD4_P1[0];
Target_tracker_RP.P2=cfg.TD4_P2[0];
Target_tracker_RP.P3=cfg.TD4_P3[0];
Target_tracker_RP.r2=degree2rad(cfg.maxRPSp[0]);
Target_tracker_RP.r3=degree2rad(cfg.maxRPAcc[0]);
Target_tracker_RP.r4=degree2rad(100000.0);
Target_trackerY.P1=cfg.TD4_P1[4];
Target_trackerY.P2=cfg.TD4_P2[4];
Target_trackerY.P3=cfg.TD4_P3[4];
Target_trackerY.P4=cfg.TD4_P4[4];
Target_trackerY.r2n=Target_trackerY.r2p=degree2rad(cfg.maxYSp[0]);
Target_trackerY.r3n=Target_trackerY.r3p=degree2rad(cfg.maxYAcc[0]);
/*初始化*/
double pwm_out[8] = { -200, -200, -200, -200, -200, -200, -200, -200 };
switch( cfg.UAVType )
{
case UAVType_Rotor4_X:
{
for( uint8_t i = 0; i < 4; ++i )
{
pwm_out[i] = cfg.STThrottle[0];
PWM_Out( pwm_out );
os_delay(0.3);
}
break;
}
case UAVType_Rotor6_X:
{
for( uint8_t i = 0; i < 6; ++i )
{
pwm_out[i] = cfg.STThrottle[0];
PWM_Out( pwm_out );
os_delay(0.3);
}
break;
}
case UAVType_Rotor8_X:
{
for( uint8_t i = 0; i < 8; ++i )
{
pwm_out[i] = cfg.STThrottle[0];
PWM_Out( pwm_out );
os_delay(0.3);
}
break;
}
case UAVType_Rotor6_S1:
{
for( uint8_t i = 0; i < 6; ++i )
{
pwm_out[i] = cfg.STThrottle[0];
PWM_Out( pwm_out );
os_delay(0.3);
}
break;
}
default:
{
UnlockCtrl();
return false;
}
}
Attitude_Control_Enabled = true;
target_Yaw = quat.getYaw();
target_Roll = target_Pitch = 0;
RollPitch_ControlMode = Attitude_ControlMode_Angle;
Yaw_ControlMode = Attitude_ControlMode_Angle;
//更新控制时间
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if(!isMSafe)
last_ZCtrlTime = last_XYCtrlTime = TIME::now();
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_Disable( double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
Altitude_Control_Disable();
Position_Control_Disable();
Attitude_Control_Enabled = false;
UnlockCtrl();
return true;
}
return false;
}
bool get_Target_Throttle( double* result, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
*result = throttle;
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_Throttle( double thr, double TIMEOUT )
{
if( isnan(thr) || isinf(thr) )
return false;
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
bool alt_enabled;
is_Altitude_Control_Enabled(&alt_enabled);
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && alt_enabled==false && ForceMSafeCtrl )
{ //屏蔽用户控制
last_ZCtrlTime = TIME::now();
UnlockCtrl();
return false;
}
throttle = thr;
//更新控制时间
if(!isMSafe && alt_enabled==false)
last_ZCtrlTime = TIME::now();
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_get_Target_RollPitch( double* Roll, double* Pitch, double TIMEOUT )
{
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
*Roll = target_Roll;
*Pitch = target_Pitch;
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_Target_RollPitch( double Roll, double Pitch, double TIMEOUT )
{
if( isnan(Roll) || isinf(Roll) || isnan(Pitch) || isinf(Pitch) )
return false;
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
bool pos_enabled;
is_Position_Control_Enabled(&pos_enabled);
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && pos_enabled==false && ForceMSafeCtrl )
{ //屏蔽用户控制
last_ZCtrlTime = TIME::now();
UnlockCtrl();
return false;
}
double angle = safe_sqrt( Roll*Roll + Pitch*Pitch );
if( angle > degree2rad(cfg.maxLean[0]) )
{
double scale = degree2rad(cfg.maxLean[0]) / angle;
Roll *= scale;
Pitch *= scale;
}
target_Roll = Roll;
target_Pitch = Pitch;
RollPitch_ControlMode = Attitude_ControlMode_Angle;
//更新控制时间
if(!isMSafe && pos_enabled==false)
last_XYCtrlTime = TIME::now();
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_Target_Yaw( double Yaw, double TIMEOUT )
{
if( isnan(Yaw) || isinf(Yaw) )
return false;
//屏蔽用户控制
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && ForceMSafeCtrl )
return false;
Quaternion quat, quatY;
get_Airframe_quat(&quat);
get_AirframeY_quat(&quatY);
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
if( Yaw_ControlMode != Attitude_ControlMode_Angle )
{
Target_trackerY.x1 = quat.getYaw();
Yaw_ControlMode = Attitude_ControlMode_Angle;
}
double yaw_err = Mod( Yaw - quatY.getYaw(), 2*Pi );
if(yaw_err > Pi)
yaw_err -= 2*Pi;
while(yaw_err < -Pi)
yaw_err += 2*Pi;
target_Yaw = Target_trackerY.x1 + yaw_err;
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_Target_YawRelative( double Yaw, double TIMEOUT )
{
if( isnan(Yaw) || isinf(Yaw) )
return false;
//屏蔽用户控制
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && ForceMSafeCtrl )
return false;
Quaternion quat;
get_Airframe_quat(&quat);
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
double currentYaw = quat.getYaw();
if( Yaw_ControlMode != Attitude_ControlMode_Angle )
{
Target_trackerY.x1 = currentYaw;
Yaw_ControlMode = Attitude_ControlMode_Angle;
}
target_Yaw = Target_trackerY.x1 + Yaw;
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_Target_YawRate( double YawRate, double TIMEOUT )
{
if( isnan(YawRate) || isinf(YawRate) )
return false;
//屏蔽用户控制
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && ForceMSafeCtrl )
return false;
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
target_AngularRate.z = YawRate;
Yaw_ControlMode = Attitude_ControlMode_AngularRate;
UnlockCtrl();
return true;
}
return false;
}
bool Attitude_Control_set_YawLock( double TIMEOUT )
{
//屏蔽用户控制
bool isMSafe = (xTaskGetCurrentTaskHandle()==MSafeTaskHandle);
if( !isMSafe && ForceMSafeCtrl )
return false;
if( LockCtrl(TIMEOUT) )
{
if( Attitude_Control_Enabled == false )
{
UnlockCtrl();
return false;
}
if( Yaw_ControlMode == Attitude_ControlMode_AngularRate )
Yaw_ControlMode = Attitude_ControlMode_Locking;
UnlockCtrl();
return true;
}
return false;
}
/*控制接口*/
//四旋翼X模式
static void ctrl_Attitude_MultiRotor_X4_PWM( double outRoll , double outPitch , double outYaw );
//六旋翼X模式
static void ctrl_Attitude_MultiRotor_X6_PWM( double outRoll , double outPitch , double outYaw );
//六旋翼异构
/*
o--o
o--o
o--o
*/
static void ctrl_Attitude_MultiRotor_S6_1_PWM( double outRoll , double outPitch , double outYaw );
//八旋翼X模式
static void ctrl_Attitude_MultiRotor_X8_PWM( double outRoll , double outPitch , double outYaw );
void ctrl_Attitude()
{
double h = 1.0 / CtrlRateHz;
if( Attitude_Control_Enabled == false )
{
Roll_u = Pitch_u = Yaw_u = 0;
update_output_throttle( 0 , h );
PWM_PullDownAll();
return;
}
//Debug保护
//油门低于起转油门拉低所有输出
Receiver rc;
getReceiver(&rc);
if( throttle < cfg.STThrottle[0] - 0.1 || ( (rc.available && rc.data[0] < cfg.STThrottle[0] - 0.1) && (rc.data[1] < 10) ) )
{
Roll_u = Pitch_u = Yaw_u = 0;
update_output_throttle( 0 , h );
PWM_PullDownAll();
return;
}
// //根据电池电压调整控制对象增益
// float BatV = getBatteryVoltage();
// float VST = Cfg_get_BatSTVoltage();
// if( BatV > 7 && VST > 7 )
// {
// float scale = BatV / VST;
// ESO[0].b = Cfg_get_RPYCtrl_b(0) * scale;
// ESO[1].b = Cfg_get_RPYCtrl_b(1) * scale;
// ESO[2].b = Cfg_get_RPYCtrl_b(2) * scale;
// }
// else
// {
// ESO[0].b = Cfg_get_RPYCtrl_b(0);
// ESO[1].b = Cfg_get_RPYCtrl_b(1);
// ESO[2].b = Cfg_get_RPYCtrl_b(2);
// }
//读取电池电压
float BatVoltage = get_MainBatteryVoltage_filted();
//计算增益修正系数
double b_scale = 1.0;
if( BatVoltage > 7 )
{
float STVoltage[2];
if( ReadParam("Bat_STVoltage", 0, 0, (uint64_t*)STVoltage, 0 ) == PR_OK )
b_scale = BatVoltage / STVoltage[0];
}
//根据电池电压调整控制对象增益
ESO[0].b = cfg.b[0] * b_scale;
ESO[1].b = cfg.b[2] * b_scale;
ESO[2].b = cfg.b[4] * b_scale;
Quaternion AirframeQuat;
get_Airframe_quat( &AirframeQuat, 0.1 );
//获取控制参数
double Ps = cfg.P1[0];
double PsY = cfg.P1[4];
vector3<double> P2( cfg.P2[0], cfg.P2[2], cfg.P2[4] );
vector3<double> P3( cfg.P3[0], cfg.P3[2], cfg.P3[4] );
//目标Roll Pitch四元数
Quaternion target_quat_PR;
//目标角速度
vector3<double> target_angular_velocity;
//获取当前四元数的Pitch Roll分量四元数
double Yaw = AirframeQuat.getYaw();
double half_sinYaw, half_cosYaw;
fast_sin_cos( 0.5*Yaw, &half_sinYaw, &half_cosYaw );
Quaternion YawQuat(
half_cosYaw ,
0 ,
0 ,
half_sinYaw
);
YawQuat.conjugate();
Quaternion_Ef current_quat_PR = Quaternion_Ef( YawQuat*AirframeQuat );
//计算旋转矩阵
current_quat_PR.conjugate();
double Rotation_Matrix[3][3]; //反向旋转
current_quat_PR.get_rotation_matrix(Rotation_Matrix);
current_quat_PR.conjugate();
double Rotation_Matrix_P[3][3]; //正向旋转
current_quat_PR.get_rotation_matrix(Rotation_Matrix_P);
//运行扩张状态观测器得到估计角速度、角加速度
vector3<double> AngularRateCtrl;
get_AngularRate_Ctrl( &AngularRateCtrl, 0.1 );
vector3<double> angular_rate_ESO;
vector3<double> angular_acceleration_ESO;
//使用ESO估计角速度、角加速度
angular_rate_ESO.set_vector(
ESO[0].get_EsAngularRate() ,
ESO[1].get_EsAngularRate() ,
ESO[2].get_EsAngularRate()
);
angular_acceleration_ESO.set_vector(
ESO[0].get_EsAngularAcceleration() ,
ESO[1].get_EsAngularAcceleration() ,
ESO[2].get_EsAngularAcceleration()
);
//计算ENU坐标系下的角速度、角加速度
vector3<double> angular_rate_ENU;
angular_rate_ENU.x = Rotation_Matrix_P[0][0]*angular_rate_ESO.x + Rotation_Matrix_P[0][1]*angular_rate_ESO.y + Rotation_Matrix_P[0][2]*angular_rate_ESO.z;
angular_rate_ENU.y = Rotation_Matrix_P[1][0]*angular_rate_ESO.x + Rotation_Matrix_P[1][1]*angular_rate_ESO.y + Rotation_Matrix_P[1][2]*angular_rate_ESO.z;
angular_rate_ENU.z = Rotation_Matrix_P[2][0]*angular_rate_ESO.x + Rotation_Matrix_P[2][1]*angular_rate_ESO.y + Rotation_Matrix_P[2][2]*angular_rate_ESO.z;
vector3<double> angular_acceleration_ENU;
angular_acceleration_ENU.x = Rotation_Matrix_P[0][0]*angular_acceleration_ESO.x + Rotation_Matrix_P[0][1]*angular_acceleration_ESO.y + Rotation_Matrix_P[0][2]*angular_acceleration_ESO.z;
angular_acceleration_ENU.y = Rotation_Matrix_P[1][0]*angular_acceleration_ESO.x + Rotation_Matrix_P[1][1]*angular_acceleration_ESO.y + Rotation_Matrix_P[1][2]*angular_acceleration_ESO.z;
angular_acceleration_ENU.z = Rotation_Matrix_P[2][0]*angular_acceleration_ESO.x + Rotation_Matrix_P[2][1]*angular_acceleration_ESO.y + Rotation_Matrix_P[2][2]*angular_acceleration_ESO.z;
//由Roll Pitch控制模式
//计算Roll Pitch目标角速度(ENU系)
vector3<double> target_angular_rate_RP;
switch( RollPitch_ControlMode )
{
default:
case Attitude_ControlMode_Angle:
{
//TD4滤目标角度
Target_tracker_RP.track3( vector2<double>(target_Roll,target_Pitch), 1.0 / CtrlRateHz );
//使用目标角度构造目标四元数
//calculate target quat Q1
// front
// x
// ^
// |
// y < --O
double half_sinR, half_cosR;
fast_sin_cos( 0.5*Target_tracker_RP.x1.x, &half_sinR, &half_cosR );
double half_sinP, half_cosP;
fast_sin_cos( 0.5*Target_tracker_RP.x1.y, &half_sinP, &half_cosP );
target_quat_PR = Quaternion(
half_cosR*half_cosP ,
half_cosP*half_sinR ,
half_cosR*half_sinP ,
-half_sinR*half_sinP
);
//计算误差四元数Q
//Q*Q1=Qt Q1为当前机体四元数,Qt为目标四元数
//Q=Qt*inv(Q1)
Quaternion current_quat_conj = current_quat_PR; current_quat_conj.conjugate();
vector3<double> PR_rotation = ( target_quat_PR * current_quat_conj ).get_Rotation_vec();
vector3<double> feed_foward_ratePR = { Target_tracker_RP.x2.x, Target_tracker_RP.x2.y , 0 };
target_angular_rate_RP = ( PR_rotation * Ps ) + feed_foward_ratePR;
break;
}
}
double target_angular_rate_Y;
switch(Yaw_ControlMode)
{
case Attitude_ControlMode_Angle:
{
if(inFlight)
{
//TD4滤目标角度
Target_trackerY.r2n = Target_trackerY.r2p = degree2rad(60.0);
Target_trackerY.track4( target_Yaw , 1.0f / CtrlRateHz );
//角度误差化为-180 - +180
double angle_error = Target_trackerY.x1 - Yaw;
while( angle_error < -Pi )
angle_error+=2*Pi;
while( angle_error > Pi )
angle_error-=2*Pi;
//求目标角速度
target_angular_rate_Y = angle_error * Ps + Target_trackerY.x2;
target_angular_rate_Y = constrain( target_angular_rate_Y , 2.5 );
}
else
{
Target_trackerY.reset();
Target_trackerY.x1 = target_Yaw = Yaw;
target_angular_rate_Y = 0;
}
break;
}
case Attitude_ControlMode_AngularRate:
{
if(inFlight)
{
Target_trackerY.r2n=Target_trackerY.r2p=degree2rad(cfg.maxYSp[0]);
Target_trackerY.track3( target_AngularRate.z , 1.0 / CtrlRateHz );
target_angular_rate_Y = Target_trackerY.x2;
}
else
{
Target_trackerY.reset();
Target_trackerY.x1 = target_Yaw = Yaw;
target_angular_rate_Y = 0;
}
break;
}
case Attitude_ControlMode_Locking:
{
if(inFlight)
{
Target_trackerY.track3( 0 , 1.0 / CtrlRateHz );
target_angular_rate_Y = Target_trackerY.x2;
if( in_symmetry_range( target_angular_rate_Y , 0.001 ) && in_symmetry_range( angular_rate_ENU.z , 0.05 ) )
{
Target_trackerY.x1 = target_Yaw = Yaw;
Yaw_ControlMode = Attitude_ControlMode_Angle;
}
}
else
{
Target_trackerY.reset();
Target_trackerY.x1 = target_Yaw = Yaw;
target_angular_rate_Y = 0;
}
break;
}
}
//计算前馈量
double YawAngleP = ( Target_trackerY.get_tracking_mode() == 4 ) ? ( Ps ) : 0;
vector3<double> Tv1_ENU = { Ps*( Target_tracker_RP.x2.x - angular_rate_ENU.x ) + Target_tracker_RP.x3.x ,
Ps*( Target_tracker_RP.x2.y - angular_rate_ENU.y ) + Target_tracker_RP.x3.y ,
YawAngleP*( Target_trackerY.x2 - angular_rate_ENU.z ) + Target_trackerY.x3 };
vector3<double> Tv2_ENU = { Ps*( Target_tracker_RP.x3.x - angular_acceleration_ENU.x ) + Target_tracker_RP.T4.x ,
Ps*( Target_tracker_RP.x3.y - angular_acceleration_ENU.y ) + Target_tracker_RP.T4.y,
YawAngleP*( Target_trackerY.x3 - angular_acceleration_ENU.z ) + Target_trackerY.x4 };
vector3<double> Tv1;
Tv1.x = Rotation_Matrix[0][0]*Tv1_ENU.x + Rotation_Matrix[0][1]*Tv1_ENU.y + Rotation_Matrix[0][2]*Tv1_ENU.z;
Tv1.y = Rotation_Matrix[1][0]*Tv1_ENU.x + Rotation_Matrix[1][1]*Tv1_ENU.y + Rotation_Matrix[1][2]*Tv1_ENU.z;
Tv1.z = Rotation_Matrix[2][0]*Tv1_ENU.x + Rotation_Matrix[2][1]*Tv1_ENU.y + Rotation_Matrix[2][2]*Tv1_ENU.z;
vector3<double> Tv2;
Tv2.x = Rotation_Matrix[0][0]*Tv2_ENU.x + Rotation_Matrix[0][1]*Tv2_ENU.y + Rotation_Matrix[0][2]*Tv2_ENU.z;
Tv2.y = Rotation_Matrix[1][0]*Tv2_ENU.x + Rotation_Matrix[1][1]*Tv2_ENU.y + Rotation_Matrix[1][2]*Tv2_ENU.z;
Tv2.z = Rotation_Matrix[2][0]*Tv2_ENU.x + Rotation_Matrix[2][1]*Tv2_ENU.y + Rotation_Matrix[2][2]*Tv2_ENU.z;
vector3<double> Ta1 = { P2.x*( Tv1.x - angular_acceleration_ESO.x ) + Tv2.x ,
P2.y*( Tv1.y - angular_acceleration_ESO.y ) + Tv2.y ,
P2.z*( Tv1.z - angular_acceleration_ESO.z ) + Tv2.z };
//计算前馈量
//把目标速度从Bodyheading旋转到机体
vector3<double> target_angular_rate_ENU;
target_angular_rate_ENU.x = target_angular_rate_RP.x;
target_angular_rate_ENU.y = target_angular_rate_RP.y;
target_angular_rate_ENU.z = target_angular_rate_RP.z + target_angular_rate_Y;
vector3<double> target_angular_rate_body;
target_angular_rate_body.x = Rotation_Matrix[0][0]*target_angular_rate_ENU.x + Rotation_Matrix[0][1]*target_angular_rate_ENU.y + Rotation_Matrix[0][2]*target_angular_rate_ENU.z;
target_angular_rate_body.y = Rotation_Matrix[1][0]*target_angular_rate_ENU.x + Rotation_Matrix[1][1]*target_angular_rate_ENU.y + Rotation_Matrix[1][2]*target_angular_rate_ENU.z;
target_angular_rate_body.z = Rotation_Matrix[2][0]*target_angular_rate_ENU.x + Rotation_Matrix[2][1]*target_angular_rate_ENU.y + Rotation_Matrix[2][2]*target_angular_rate_ENU.z;
//把目标速度从Bodyheading旋转到机体
//计算目标角加速度
vector3<double> target_angular_acceleration = target_angular_rate_body - angular_rate_ESO;
target_angular_acceleration.x *= P2.x;
target_angular_acceleration.y *= P2.y;
target_angular_acceleration.z *= P2.z;
target_angular_acceleration = target_angular_acceleration + Tv1;
//计算目标角加速度
//计算角加速度误差
vector3<double> angular_acceleration_error = target_angular_acceleration - angular_acceleration_ESO;
vector3<double> disturbance(
ESO[0].get_EsDisturbance() ,
ESO[1].get_EsDisturbance() ,
ESO[2].get_EsDisturbance()
);
static vector3<double> last_disturbance = { 0 , 0 , 0 };
vector3<double> disturbance_Derivative = (disturbance - last_disturbance) * CtrlRateHz;
last_disturbance = disturbance;
double outRoll;double outPitch;double outYaw;
if( inFlight )
{
outRoll = ( ESO[0].get_EsMainPower() + ESO[0].T * ( angular_acceleration_error.x * P3.x + Ta1.x /*- disturbance_x*/ ) )/ESO[0].b;
outPitch = ( ESO[1].get_EsMainPower() + ESO[1].T * ( angular_acceleration_error.y * P3.y + Ta1.y /*- disturbance_y*/ ) )/ESO[1].b;
// outYaw = ( ESO_AngularRate_get_EsMainPower( &ESO[2] ) + ESO[2].T * ( angular_acceleration_error.z * P.z + Ta1.z /*- disturbance_z*/ ) )/ESO[2].b;
outYaw = ( target_angular_acceleration.z - disturbance.z ) / ESO[2].b;
}
else
{
outRoll = ESO[0].T * ( angular_acceleration_error.x * P3.x )/ESO[0].b;
outPitch = ESO[1].T * ( angular_acceleration_error.y * P3.y )/ESO[1].b;
//outYaw = ESO[2].T * ( angular_acceleration_error.z * P.z )/ESO[2].b;
outYaw = ( target_angular_acceleration.z ) / ESO[2].b;
}
// outRoll_filted += 80 * h * ( outRoll - outRoll_filted );
// outPitch_filted += 80 * h * ( outPitch - outPitch_filted );
// outYaw_filted += 80 * h * ( outYaw - outYaw_filted );
if( inFlight )
{
double logbuf[10];
logbuf[0] = target_angular_rate_body.x;
logbuf[1] = AngularRateCtrl.x;
logbuf[2] = angular_rate_ESO.x;
logbuf[3] = target_angular_acceleration.x;
logbuf[4] = angular_acceleration_ESO.x;
logbuf[5] = ESO[0].get_EsMainPower();
logbuf[6] = outRoll;
logbuf[7] = disturbance.x;
logbuf[8] = ESO[0].u;
SDLog_Msg_DebugVect( "att", logbuf, 9 );
}
switch( cfg.UAVType )
{
case UAVType_Rotor4_X:
ctrl_Attitude_MultiRotor_X4_PWM( outRoll , outPitch , outYaw );
break;
case UAVType_Rotor6_X:
ctrl_Attitude_MultiRotor_X6_PWM( outRoll , outPitch , outYaw );
break;
case UAVType_Rotor8_X:
ctrl_Attitude_MultiRotor_X8_PWM( outRoll , outPitch , outYaw );
break;
//
// case UAVType_Rotor4_C:
// ctrl_Attitude_MultiRotor_C4_PWM( outRoll , outPitch , outYaw );
// break;
//
// case UAVType_Rotor42_C:
// ctrl_Attitude_MultiRotor_C42_PWM( outRoll , outPitch , outYaw );
// break;
case UAVType_Rotor6_S1:
ctrl_Attitude_MultiRotor_S6_1_PWM( outRoll , outPitch , outYaw );
break;
default:
PWM_PullDownAll();
break;
}
}
//电机非线性输出 线性修正
static inline void throttle_nonlinear_compensation( double out[8] )
{
double output_minimum_throttle = cfg.STThrottle[0];
double output_range = 100.0f - output_minimum_throttle;
double inv_output_range = 1.0 / output_range;
//a:非线性因子(0-1)
//m:最大油门比例(0.6-1)
//设油门-力曲线方程为:
//F = kx^2 + (1-a)x ( 0<=x<=m F最大值为1 )
//x = m时:km^2 + (1-a)m = 1
//得k = ( 1 - (1-a)m ) / m^2
//a_1 = a - 1
//Hk = 1 / 2k
//K4 = 4* k
//解方程组:kx^2 + (1-a)x = out
//得到的x即为线性化后的输出
double _lift_max = cfg.FullThrRatio[0];
double a_1 = cfg.NonlinearFactor[0] - 1;
double k = ( 1 + a_1*_lift_max ) / (_lift_max*_lift_max);
double Hk = 1.0f / (2*k);
double K4 = 4 * k;
for( uint8_t i = 0; i < 8; ++i )
{
if( out[i] > output_minimum_throttle - 0.1f )
{
out[i] -= output_minimum_throttle;
out[i] *= inv_output_range;
if( out[i] < 0 )
out[i] = 0;
out[i] = Hk*( a_1 + safe_sqrt( a_1*a_1 + K4*out[i] ) );
out[i] *= output_range;
out[i] += output_minimum_throttle;
}
else
out[i] = 0;
}
}
//四旋翼X模式
static void ctrl_Attitude_MultiRotor_X4_PWM( double outRoll , double outPitch , double outYaw )
{
double rotor_output[8] = {0,0,0,0,-200,-200,-200,-200};
double output_minimum_throttle = cfg.STThrottle[0];
// if( get_current_Receiver()->data[0] < 5 )
// {
// PWM_PullDownAll();
// update_output_throttle( 0 , 1.0f/CtrlRateHz );
// return;
// }
if( throttle < output_minimum_throttle - 0.1f )
{
PWM_PullDownAll();
update_output_throttle( 0 , 1.0/CtrlRateHz );
return;
}
double output_throttle = throttle;
double output_midpoint = ( 100.0f - output_minimum_throttle ) / 2;
// double cos_angle = lean_cos;
// if( cos_angle < 0.5f )cos_angle = 0.5f;
// output_throttle = throttle / cos_angle;
/*pitch roll 输出限幅*/
//如果需要的pitch roll输出超出当前油门能提供的输出范围
//调整油门获得尽量满足pitch roll输出
rotor_output[0] = -outPitch+outRoll;
rotor_output[1] = +outPitch+outRoll;
rotor_output[2] = +outPitch-outRoll;
rotor_output[3] = -outPitch-outRoll;
double output_max;
double output_min ;
output_max = rotor_output[0];
for( int i = 1 ; i < 4 ; ++i )
{
if( rotor_output[i] > output_max ) output_max = rotor_output[i];
}
double max_allow_output = 100.0f - output_throttle;
double min_allow_output = output_minimum_throttle - output_throttle;
double allow_ouput_range;
if( max_allow_output < -min_allow_output )
{
//降低油门确保姿态输出
allow_ouput_range = max_allow_output;
if( output_max > allow_ouput_range )
{
if( output_max > output_midpoint )
{
output_throttle = output_midpoint + output_minimum_throttle;
allow_ouput_range = output_midpoint;
}
else
{
output_throttle = 100.0f - output_max;
allow_ouput_range = output_max;
}
}
}
else
{
//抬高油门保证姿态输出
allow_ouput_range = -min_allow_output;
if( output_max > allow_ouput_range )
{
double hover_throttle_force = hover_throttle - output_minimum_throttle;
double max_allowed_output_range = ( hover_throttle_force > output_midpoint ? output_midpoint : hover_throttle_force ) * 0.95;
// double hover_throttle_force = hover_throttle - output_minimum_throttle;
// double max_allowed_throttle_force = output_throttle - output_minimum_throttle;
// max_allowed_throttle_force += hover_throttle_force*0.3;
// double max_allowed_output_range = ( max_allowed_throttle_force > output_midpoint ? output_midpoint : max_allowed_throttle_force );
if( max_allowed_output_range < output_throttle - output_minimum_throttle )
max_allowed_output_range = output_throttle - output_minimum_throttle;
double max_allowed_throttle = max_allowed_output_range + output_minimum_throttle;
if( output_max > max_allowed_output_range )
{
output_throttle = max_allowed_throttle;
allow_ouput_range = max_allowed_output_range;
}
else
{
output_throttle = output_minimum_throttle + output_max;
allow_ouput_range = output_max;
}
}
}
//输出限幅修正
if( output_max > allow_ouput_range )
{
double scale = allow_ouput_range / output_max;
rotor_output[0] *= scale;
rotor_output[1] *= scale;
rotor_output[2] *= scale;
rotor_output[3] *= scale;
Roll_u = outRoll * scale;
Pitch_u = outPitch * scale;
}
else
{
Roll_u = outRoll;
Pitch_u = outPitch;
}
/*pitch roll 输出限幅*/
/*yaw output 输出限幅*/
//for Yaw control, it has the lowest priority
//lower output to ensure attitude control and alt control
output_max = 0.0f;
output_min = 100.0f;
/*find min yaw_scale*/
double yaw_scale = 1.0f;
for( int i = 0 ; i < 4 ; ++i )
{
double current_out_yaw = ( (i&1) == 1 ) ? outYaw : -outYaw;
double current_rotor_output = output_throttle + rotor_output[i];
max_allow_output = 100.0f - current_rotor_output;
min_allow_output = output_minimum_throttle - current_rotor_output;
if( current_out_yaw > max_allow_output + 0.01f )
{
double new_yaw_scale = max_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
else if( current_out_yaw < min_allow_output - 0.01f )
{
double new_yaw_scale = min_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
}
/*find min yaw_scale*/
//lower yaw output to ensure attitude control and alt control
if( yaw_scale < 0 )
yaw_scale = 0;
outYaw *= yaw_scale;
Yaw_u = outYaw;
/*yaw output 输出限幅*/
update_output_throttle( output_throttle , 1.0/CtrlRateHz );
rotor_output[0] += output_throttle-outYaw;
rotor_output[1] += output_throttle+outYaw;
rotor_output[2] += output_throttle-outYaw;
rotor_output[3] += output_throttle+outYaw;
throttle_nonlinear_compensation( rotor_output );
PWM_Out( rotor_output );
}
//六旋翼X模式
static void ctrl_Attitude_MultiRotor_X6_PWM( double outRoll , double outPitch , double outYaw )
{
double rotor_output[8] = {0,0,0,0,0,0,-200,-200};
double output_minimum_throttle = cfg.STThrottle[0];
// if( get_current_Receiver()->data[0] < 5 )
// {
// PWM_PullDownAll();
// update_output_throttle( 0 , 1.0f/CtrlRateHz );
// return;
// }
if( throttle < output_minimum_throttle - 0.1f )
{
PWM_PullDownAll();
update_output_throttle( 0 , 1.0/CtrlRateHz );
return;
}
double output_throttle = throttle;
double output_midpoint = ( 100.0f - output_minimum_throttle ) / 2;
// float cos_angle = lean_cos;
// if( cos_angle < 0.5f )cos_angle = 0.5f;
// output_throttle = throttle / cos_angle;
/*pitch roll 输出限幅*/
//如果需要的pitch roll输出超出当前油门能提供的输出范围
//调整油门获得尽量满足pitch roll输出
double RollS = outRoll * 1.1547005383792515290182975610039f;
double half_outRoll = 0.5f * RollS;
rotor_output[0] = -outPitch+half_outRoll;
rotor_output[1] = RollS;
rotor_output[2] = +outPitch+half_outRoll;
rotor_output[3] = +outPitch-half_outRoll;
rotor_output[4] = -RollS;
rotor_output[5] = -outPitch-half_outRoll;
double output_max;
double output_min ;
output_max = rotor_output[0];
for( int i = 1 ; i < 6 ; ++i )
{
if( rotor_output[i] > output_max ) output_max = rotor_output[i];
}
double max_allow_output = 100.0f - output_throttle;
double min_allow_output = output_minimum_throttle - output_throttle;
double allow_ouput_range;
if( max_allow_output < -min_allow_output )
{
//降低油门确保姿态输出
allow_ouput_range = max_allow_output;
if( output_max > allow_ouput_range )
{
if( output_max > output_midpoint )
{
output_throttle = output_midpoint + output_minimum_throttle;
allow_ouput_range = output_midpoint;
}
else
{
output_throttle = 100.0f - output_max;
allow_ouput_range = output_max;
}
}
}
else
{
allow_ouput_range = -min_allow_output;
if( output_max > allow_ouput_range )
{
double hover_throttle_force = hover_throttle - output_minimum_throttle;
double max_allowed_output_range = ( hover_throttle_force > output_midpoint ? output_midpoint : hover_throttle_force ) * 0.8f;
if( max_allowed_output_range < output_throttle - output_minimum_throttle )
max_allowed_output_range = output_throttle - output_minimum_throttle;
double max_allowed_throttle = max_allowed_output_range + output_minimum_throttle;
if( output_max > max_allowed_output_range )
{
output_throttle = max_allowed_throttle;
allow_ouput_range = max_allowed_output_range;
}
else
{
output_throttle = output_minimum_throttle + output_max;
allow_ouput_range = output_max;
}
}
}
if( output_max > allow_ouput_range )
{
double scale = allow_ouput_range / output_max;
rotor_output[0] *= scale;
rotor_output[1] *= scale;
rotor_output[2] *= scale;
rotor_output[3] *= scale;
rotor_output[4] *= scale;
rotor_output[5] *= scale;
Roll_u = outRoll * scale;
Pitch_u = outPitch * scale;
}
else
{
Roll_u = outRoll;
Pitch_u = outPitch;
}
/*pitch roll 输出限幅*/
/*yaw output 输出限幅*/
//for Yaw control, it has the lowest priority
//lower output to ensure attitude control and alt control
output_max = 0.0f;
output_min = 100.0f;
/*find min yaw_scale*/
double yaw_scale = 1.0f;
for( int i = 0 ; i < 6 ; ++i )
{
double current_out_yaw = ( (i&1) == 1 ) ? outYaw : -outYaw;
double current_rotor_output = output_throttle + rotor_output[i];
max_allow_output = 100.0f - current_rotor_output;
min_allow_output = output_minimum_throttle - current_rotor_output;
if( current_out_yaw > max_allow_output + 0.01f )
{
double new_yaw_scale = max_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
else if( current_out_yaw < min_allow_output - 0.01f )
{
double new_yaw_scale = min_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
}
/*find min yaw_scale*/
//lower yaw output to ensure attitude control and alt control
if( yaw_scale < 0 )
yaw_scale = 0;
outYaw *= yaw_scale;
Yaw_u = outYaw;
/*yaw output 输出限幅*/
update_output_throttle( output_throttle , 1.0/CtrlRateHz );
rotor_output[0] += output_throttle-outYaw;
rotor_output[1] += output_throttle+outYaw;
rotor_output[2] += output_throttle-outYaw;
rotor_output[3] += output_throttle+outYaw;
rotor_output[4] += output_throttle-outYaw;
rotor_output[5] += output_throttle+outYaw;
throttle_nonlinear_compensation( rotor_output );
PWM_Out( rotor_output );
}
//六旋翼异构
/*
o--o
o--o
o--o
*/
static void ctrl_Attitude_MultiRotor_S6_1_PWM( double outRoll , double outPitch , double outYaw )
{
double rotor_output[8] = {0,0,0,0,0,0,-200,-200};
double output_minimum_throttle = cfg.STThrottle[0];
// if( get_current_Receiver()->data[0] < 5 )
// {
// PWM_PullDownAll();
// update_output_throttle( 0 , 1.0f/CtrlRateHz );
// return;
// }
if( throttle < output_minimum_throttle - 0.1f )
{
PWM_PullDownAll();
update_output_throttle( 0 , 1.0/CtrlRateHz );
return;
}
double output_throttle = throttle;
double output_midpoint = ( 100.0f - output_minimum_throttle ) / 2;
// float cos_angle = lean_cos;
// if( cos_angle < 0.5f )cos_angle = 0.5f;
// output_throttle = throttle / cos_angle;
/*pitch roll 输出限幅*/
//如果需要的pitch roll输出超出当前油门能提供的输出范围
//调整油门获得尽量满足pitch roll输出
double RollS = outRoll * 1.732;
double half_outRoll = 0.5f * RollS;
rotor_output[0] = -outPitch+half_outRoll;
rotor_output[1] = RollS;
rotor_output[2] = +outPitch+half_outRoll;
rotor_output[3] = +outPitch-half_outRoll;
rotor_output[4] = -RollS;
rotor_output[5] = -outPitch-half_outRoll;
double output_max;
double output_min ;
output_max = rotor_output[0];
for( int i = 1 ; i < 6 ; ++i )
{
if( rotor_output[i] > output_max ) output_max = rotor_output[i];
}
double max_allow_output = 100.0f - output_throttle;
double min_allow_output = output_minimum_throttle - output_throttle;
double allow_ouput_range;
if( max_allow_output < -min_allow_output )
{
//降低油门确保姿态输出
allow_ouput_range = max_allow_output;
if( output_max > allow_ouput_range )
{
if( output_max > output_midpoint )
{
output_throttle = output_midpoint + output_minimum_throttle;
allow_ouput_range = output_midpoint;
}
else
{
output_throttle = 100.0f - output_max;
allow_ouput_range = output_max;
}
}
}
else
{
allow_ouput_range = -min_allow_output;
if( output_max > allow_ouput_range )
{
double hover_throttle_force = hover_throttle - output_minimum_throttle;
double max_allowed_output_range = ( hover_throttle_force > output_midpoint ? output_midpoint : hover_throttle_force ) * 0.8f;
if( max_allowed_output_range < output_throttle - output_minimum_throttle )
max_allowed_output_range = output_throttle - output_minimum_throttle;
double max_allowed_throttle = max_allowed_output_range + output_minimum_throttle;
if( output_max > max_allowed_output_range )
{
output_throttle = max_allowed_throttle;
allow_ouput_range = max_allowed_output_range;
}
else
{
output_throttle = output_minimum_throttle + output_max;
allow_ouput_range = output_max;
}
}
}
if( output_max > allow_ouput_range )
{
double scale = allow_ouput_range / output_max;
rotor_output[0] *= scale;
rotor_output[1] *= scale;
rotor_output[2] *= scale;
rotor_output[3] *= scale;
rotor_output[4] *= scale;
rotor_output[5] *= scale;
Roll_u = outRoll * scale;
Pitch_u = outPitch * scale;
}
else
{
Roll_u = outRoll;
Pitch_u = outPitch;
}
/*pitch roll 输出限幅*/
/*yaw output 输出限幅*/
//for Yaw control, it has the lowest priority
//lower output to ensure attitude control and alt control
output_max = 0.0f;
output_min = 100.0f;
/*find min yaw_scale*/
double yaw_scale = 1.0f;
for( int i = 0 ; i < 6 ; ++i )
{
double current_out_yaw = ( (i&1) == 1 ) ? 0.5*outYaw : -0.5*outYaw;
if( i==1 || i==4 )
current_out_yaw *= 2;
double current_rotor_output = output_throttle + rotor_output[i];
max_allow_output = 100.0f - current_rotor_output;
min_allow_output = output_minimum_throttle - current_rotor_output;
if( current_out_yaw > max_allow_output + 0.01f )
{
double new_yaw_scale = max_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
else if( current_out_yaw < min_allow_output - 0.01f )
{
double new_yaw_scale = min_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
}
/*find min yaw_scale*/
//lower yaw output to ensure attitude control and alt control
if( yaw_scale < 0 )
yaw_scale = 0;
outYaw *= yaw_scale;
Yaw_u = outYaw;
/*yaw output 输出限幅*/
update_output_throttle( output_throttle , 1.0/CtrlRateHz );
rotor_output[0] += output_throttle-outYaw;
rotor_output[1] += output_throttle+outYaw;
rotor_output[2] += output_throttle-outYaw;
rotor_output[3] += output_throttle+outYaw;
rotor_output[4] += output_throttle-outYaw;
rotor_output[5] += output_throttle+outYaw;
throttle_nonlinear_compensation( rotor_output );
PWM_Out( rotor_output );
}
//八旋翼X模式
static void ctrl_Attitude_MultiRotor_X8_PWM( double outRoll , double outPitch , double outYaw )
{
double rotor_output[8] = {0,0,0,0,0,0,0,0};
double output_minimum_throttle = cfg.STThrottle[0];
// if( get_current_Receiver()->data[0] < 5 )
// {
// PWM_PullDownAll();
// update_output_throttle( 0 , 1.0f/CtrlRateHz );
// return;
// }
if( throttle < output_minimum_throttle - 0.1f )
{
PWM_PullDownAll();
update_output_throttle( 0 , 1.0/CtrlRateHz );
return;
}
double output_throttle = throttle;
double output_midpoint = ( 100.0f - output_minimum_throttle ) / 2;
// float cos_angle = lean_cos;
// if( cos_angle < 0.5f )cos_angle = 0.5f;
// output_throttle = throttle / cos_angle;
/*pitch roll 输出限幅*/
//如果需要的pitch roll输出超出当前油门能提供的输出范围
//调整油门获得尽量满足pitch roll输出
rotor_output[0] = -outPitch+outRoll;
rotor_output[1] = -outPitch+outRoll;
rotor_output[2] = +outPitch+outRoll;
rotor_output[3] = +outPitch+outRoll;
rotor_output[4] = +outPitch-outRoll;
rotor_output[5] = +outPitch-outRoll;
rotor_output[6] = -outPitch-outRoll;
rotor_output[7] = -outPitch-outRoll;
double output_max;
double output_min ;
output_max = rotor_output[0];
for( int i = 1 ; i < 8 ; ++i )
{
if( rotor_output[i] > output_max ) output_max = rotor_output[i];
}
double max_allow_output = 100.0f - output_throttle;
double min_allow_output = output_minimum_throttle - output_throttle;
double allow_ouput_range;
if( max_allow_output < -min_allow_output )
{
//降低油门确保姿态输出
allow_ouput_range = max_allow_output;
if( output_max > allow_ouput_range )
{
if( output_max > output_midpoint )
{
output_throttle = output_midpoint + output_minimum_throttle;
allow_ouput_range = output_midpoint;
}
else
{
output_throttle = 100.0f - output_max;
allow_ouput_range = output_max;
}
}
}
else
{
allow_ouput_range = -min_allow_output;
if( output_max > allow_ouput_range )
{
double hover_throttle_force = hover_throttle - output_minimum_throttle;
double max_allowed_output_range = ( hover_throttle_force > output_midpoint ? output_midpoint : hover_throttle_force ) * 0.8f;
if( max_allowed_output_range < output_throttle - output_minimum_throttle )
max_allowed_output_range = output_throttle - output_minimum_throttle;
double max_allowed_throttle = max_allowed_output_range + output_minimum_throttle;
if( output_max > max_allowed_output_range )
{
output_throttle = max_allowed_throttle;
allow_ouput_range = max_allowed_output_range;
}
else
{
output_throttle = output_minimum_throttle + output_max;
allow_ouput_range = output_max;
}
}
}
if( output_max > allow_ouput_range )
{
double scale = allow_ouput_range / output_max;
rotor_output[0] *= scale;
rotor_output[1] *= scale;
rotor_output[2] *= scale;
rotor_output[3] *= scale;
rotor_output[4] *= scale;
rotor_output[5] *= scale;
rotor_output[6] *= scale;
rotor_output[7] *= scale;
Roll_u = outRoll * scale;
Pitch_u = outPitch * scale;
}
else
{
Roll_u = outRoll;
Pitch_u = outPitch;
}
/*pitch roll 输出限幅*/
/*yaw output 输出限幅*/
//for Yaw control, it has the lowest priority
//lower output to ensure attitude control and alt control
output_max = 0.0f;
output_min = 100.0f;
/*find min yaw_scale*/
double yaw_scale = 1.0f;
for( int i = 0 ; i < 8 ; ++i )
{
double current_out_yaw = ( (i&1) == 1 ) ? outYaw : -outYaw;
double current_rotor_output = output_throttle + rotor_output[i];
max_allow_output = 100.0f - current_rotor_output;
min_allow_output = output_minimum_throttle - current_rotor_output;
if( current_out_yaw > max_allow_output + 0.01f )
{
double new_yaw_scale = max_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
else if( current_out_yaw < min_allow_output - 0.01f )
{
double new_yaw_scale = min_allow_output / current_out_yaw;
if( new_yaw_scale < yaw_scale ) yaw_scale = new_yaw_scale;
}
}
/*find min yaw_scale*/
//lower yaw output to ensure attitude control and alt control
if( yaw_scale < 0 )
yaw_scale = 0;
outYaw *= yaw_scale;
Yaw_u = outYaw;
/*yaw output 输出限幅*/
update_output_throttle( output_throttle , 1.0/CtrlRateHz );
rotor_output[0] += output_throttle-outYaw;
rotor_output[1] += output_throttle+outYaw;
rotor_output[2] += output_throttle-outYaw;
rotor_output[3] += output_throttle+outYaw;
rotor_output[4] += output_throttle-outYaw;
rotor_output[5] += output_throttle+outYaw;
rotor_output[6] += output_throttle-outYaw;
rotor_output[7] += output_throttle+outYaw;
throttle_nonlinear_compensation( rotor_output );
PWM_Out( rotor_output );
}
void init_Ctrl_Attitude()
{
//注册参数
cfg.UAVType = UAVType_Rotor4_X;
cfg.STThrottle[0] = 10;
cfg.NonlinearFactor[0] = 0.45;
cfg.FullThrRatio[0] = 0.95;
cfg.T[0] = 0.1;
cfg.b[0] = 5.5; cfg.b[2] = 5.5; cfg.b[4] = 1.0;
cfg.TD4_P1[0] = 15; cfg.TD4_P1[2] = 15; cfg.TD4_P1[4] = 2;
cfg.TD4_P2[0] = 15; cfg.TD4_P2[2] = 15; cfg.TD4_P2[4] = 5;
cfg.TD4_P3[0] = 25; cfg.TD4_P3[2] = 25; cfg.TD4_P3[4] = 25;
cfg.TD4_P4[0] = 25; cfg.TD4_P4[2] = 25; cfg.TD4_P4[4] = 25;
cfg.P1[0] = 5; cfg.P1[2] = 5; cfg.P1[4] = 2;
cfg.P2[0] = 10; cfg.P2[2] = 10; cfg.P2[4] = 5;
cfg.P3[0] = 25; cfg.P3[2] = 25; cfg.P3[4] = 25;
cfg.P4[0] = 15; cfg.P4[2] = 15; cfg.P4[4] = 15;
cfg.beta2[0] = 30;
cfg.maxLean[0] = 35;
cfg.maxRPSp[0] = 350;
cfg.maxRPAcc[0] = 7000;
cfg.maxYSp[0] = 80;
cfg.maxYAcc[0] = 1000;
MAV_PARAM_TYPE param_types[] = {
MAV_PARAM_TYPE_UINT8 , //UAV Type
MAV_PARAM_TYPE_REAL32 , //起转油门
MAV_PARAM_TYPE_REAL32 , //非线性参数
MAV_PARAM_TYPE_REAL32 , //满油门比例
MAV_PARAM_TYPE_REAL32 , //T
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //b[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //TD4_P1[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //TD4_P2[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //TD4_P3[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //TD4_P4[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //P1[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //P2[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //P3[3]
MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 ,MAV_PARAM_TYPE_REAL32 , //P4[3]
MAV_PARAM_TYPE_REAL32 , //beta2
MAV_PARAM_TYPE_REAL32 , //最大倾斜角
MAV_PARAM_TYPE_REAL32 , //maxRPSp
MAV_PARAM_TYPE_REAL32 , //maxRPAcc
MAV_PARAM_TYPE_REAL32 , //maxYSp
MAV_PARAM_TYPE_REAL32 , //maxYAcc
};
SName param_names[] = {
"AC_UAVType" , //UAV Type
"AC_STThr" , //起转油门
"AC_NonlinF" , //非线性参数
"AC_FullThrR" , //满油门比例
"AC_T" , //T
"AC_Roll_b" ,"AC_Pitch_b" ,"AC_Yaw_b" , //b[3]
"AC_Roll_TD4P1" ,"AC_Pitch_TD4P1" ,"AC_Yaw_TD4P1" , //TD4_P1[3]
"AC_Roll_TD4P2" ,"AC_Pitch_TD4P2" ,"AC_Yaw_TD4P2" , //TD4_P2[3]
"AC_Roll_TD4P3" ,"AC_Pitch_TD4P3" ,"AC_Yaw_TD4P3" , //TD4_P3[3]
"AC_Roll_TD4P4" ,"AC_Pitch_TD4P4" ,"AC_Yaw_TD4P4" , //TD4_P4[3]
"AC_Roll_P1" ,"AC_Pitch_P1" ,"AC_Yaw_P1" , //P1[3]
"AC_Roll_P2" ,"AC_Pitch_P2" ,"AC_Yaw_P2" , //P2[3]
"AC_Roll_P3" ,"AC_Pitch_P3" ,"AC_Yaw_P3" , //P3[3]
"AC_Roll_P4" ,"AC_Pitch_P4" ,"AC_Yaw_P4" , //P4[3]
"AC_Beta2" , //beta2
"AC_maxLean" , //最大倾斜角
"AC_maxRPSp" , //最大Pitch Roll速度
"AC_maxRPAcc" , //最大Pitch Roll加速度
"AC_maxYSp" , //最大偏航速度
"AC_maxYAcc" , //最大偏航加速度
};
ParamGroupRegister( "AttCtrl", 2, 38, param_types, param_names, (uint64_t*)&cfg );
}















 742
742











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









