










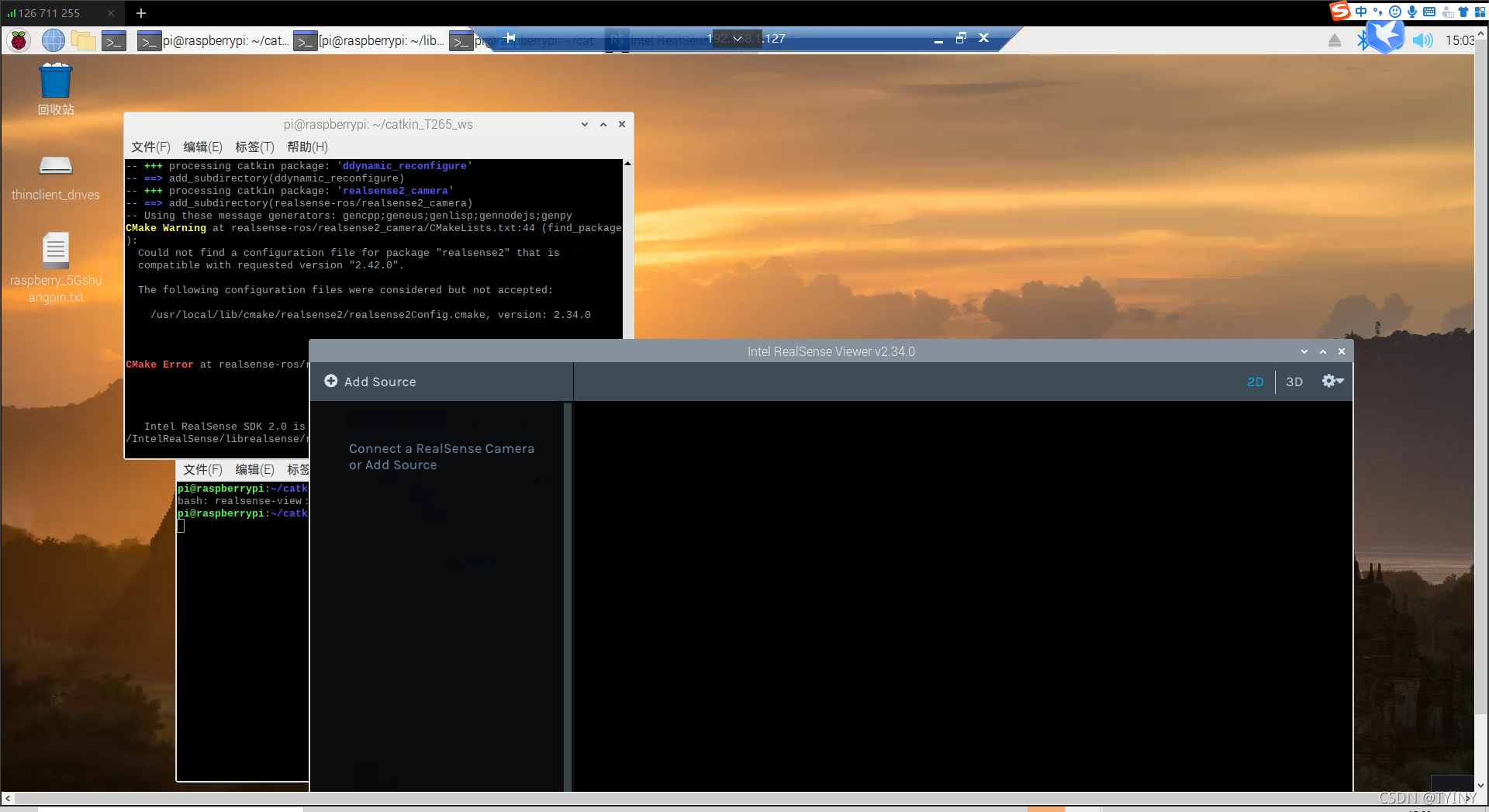
librealsense和realsense-ros的版本确实有对应关系,对应关系体现在realsense2_camera功能包的camkelists里面有写要找哪个版本的librealsense。可以从这确定两者版本的对应关系。你就算已经安装了librealsense,但是版本和realsense-ros不对,那么编译realsense-ros(指下载源码编译安装realsense-ros的时候)的之后依旧会编译报错说找不到对应版本的librealsense。
我们可以通过打开realsense-viewer查看之前二进制安装的librealsense的版本
15:10:10
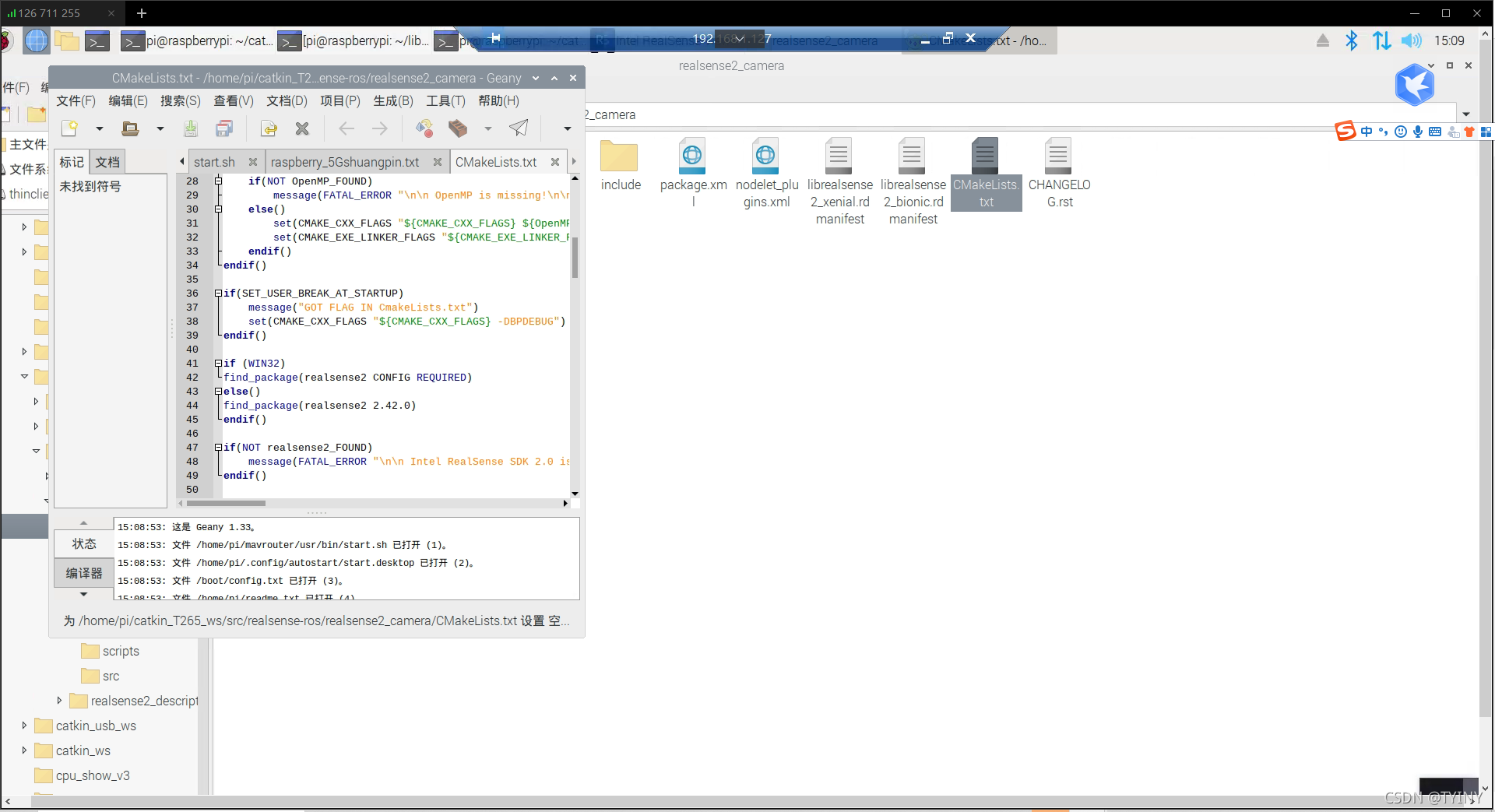
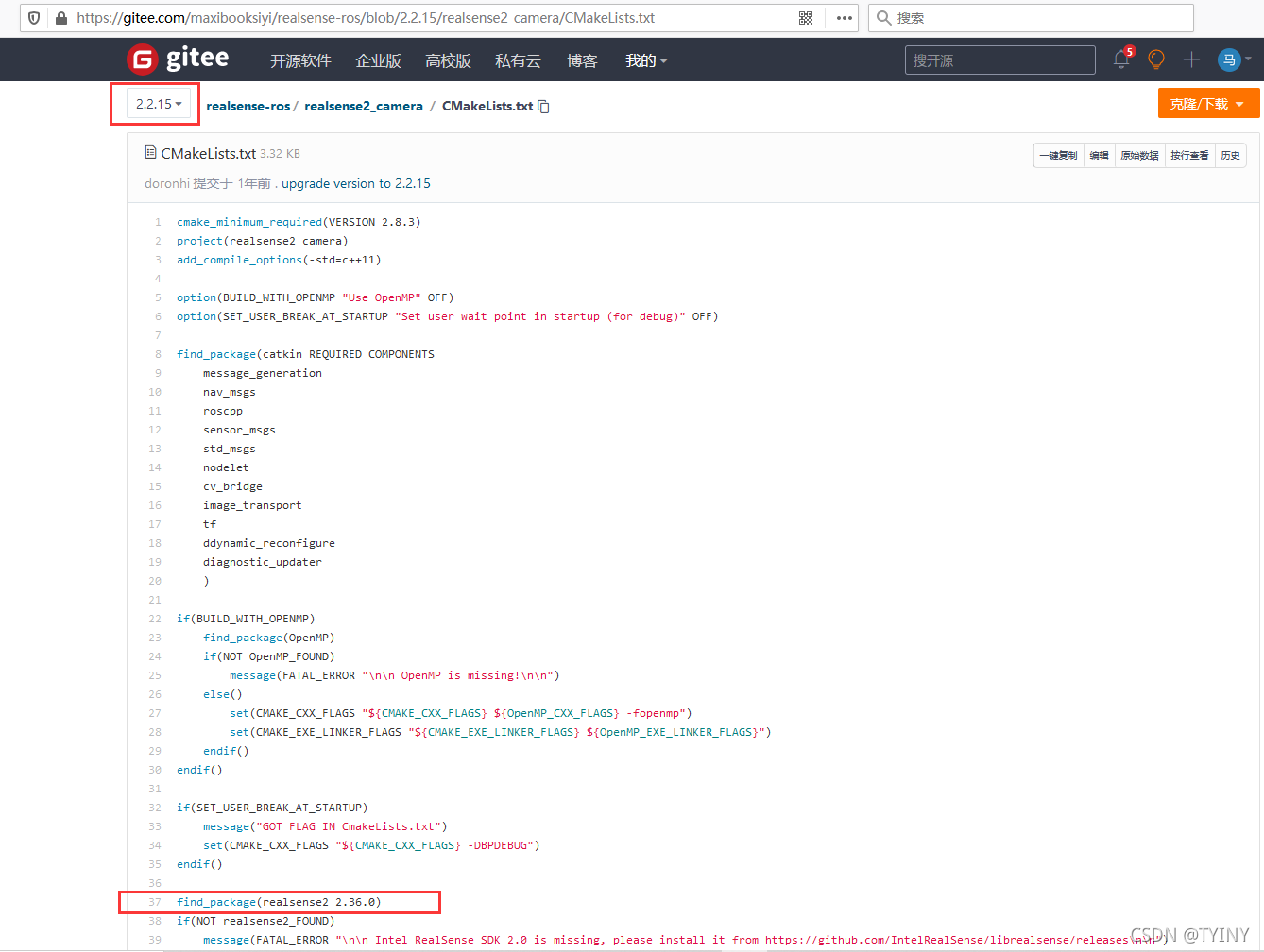
每个realsense2_camera功能包的cmakelists里面有写对应需要多少版本的librealsense
15:22:42
我直接把cmakelists里面的要求版本从2.42.0改为2.34.0了,因为没有找到2.34.0版本的librealsense对应的版本的realsense2_camera功能包。
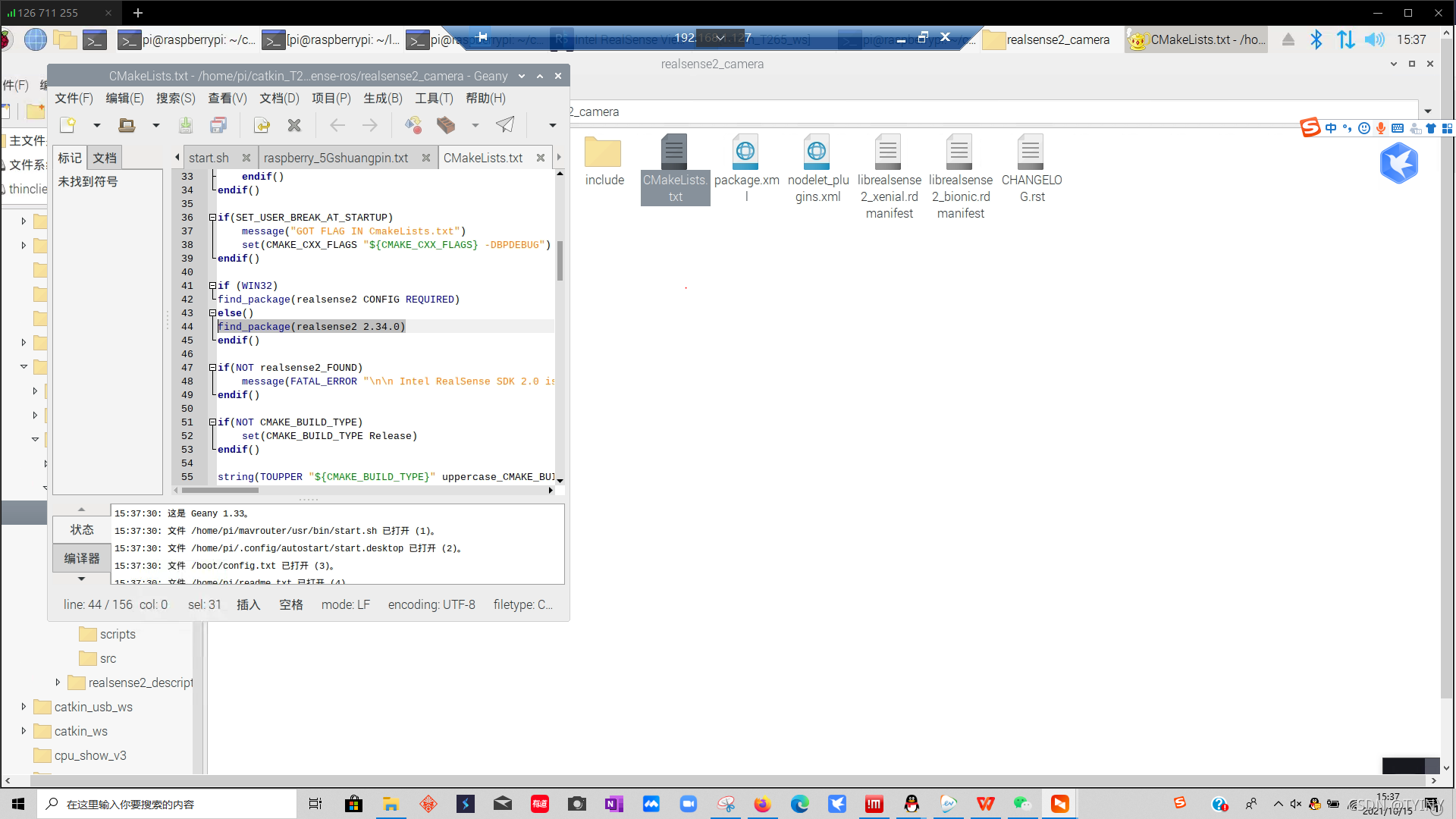
至少这样编译realsense-ros编译通过了,可能不同版本的librealsense也没有太大改动,直接catkin_make命令
现在再看阿木的librealsense和realsense-ros的版本要求,很多好理解了,为什么librealsense也就是realsense sdk的版本是2.36.0,是因为二进制安装librealsense的时候就是装的这个版本,从这也可以推出阿木的librealsense是二进制安装的。
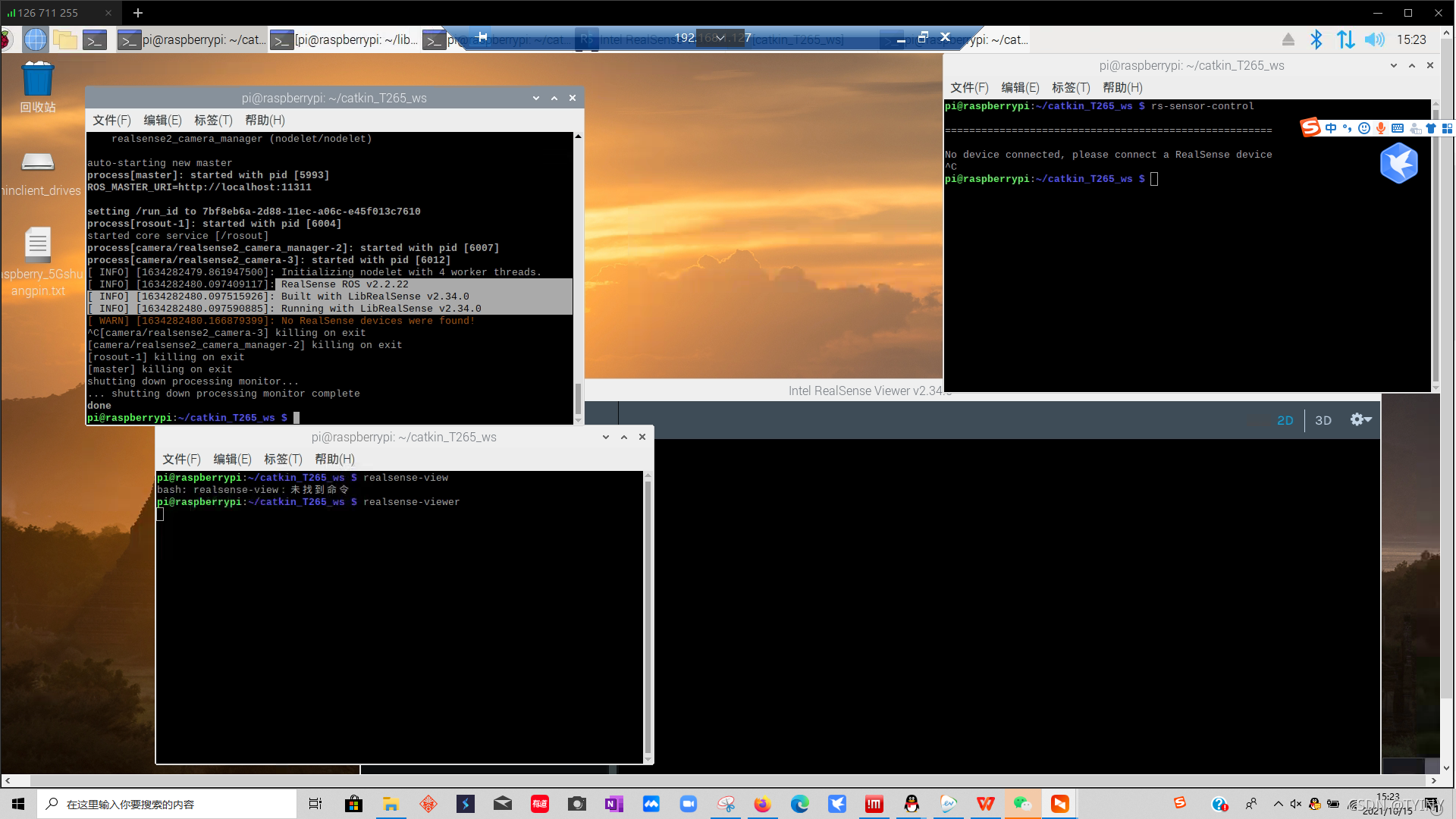
错了,二进制安装的librealsense是2.34.0,看来阿木也是源码安装的?
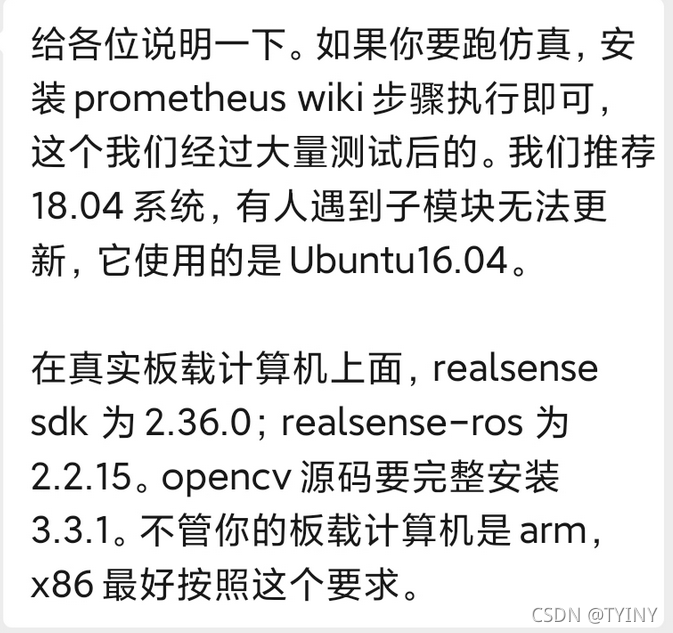
从这可以看出阿木的Librealsense和realsense-ros都是源码编译安装的
选择具体的版本去看标签
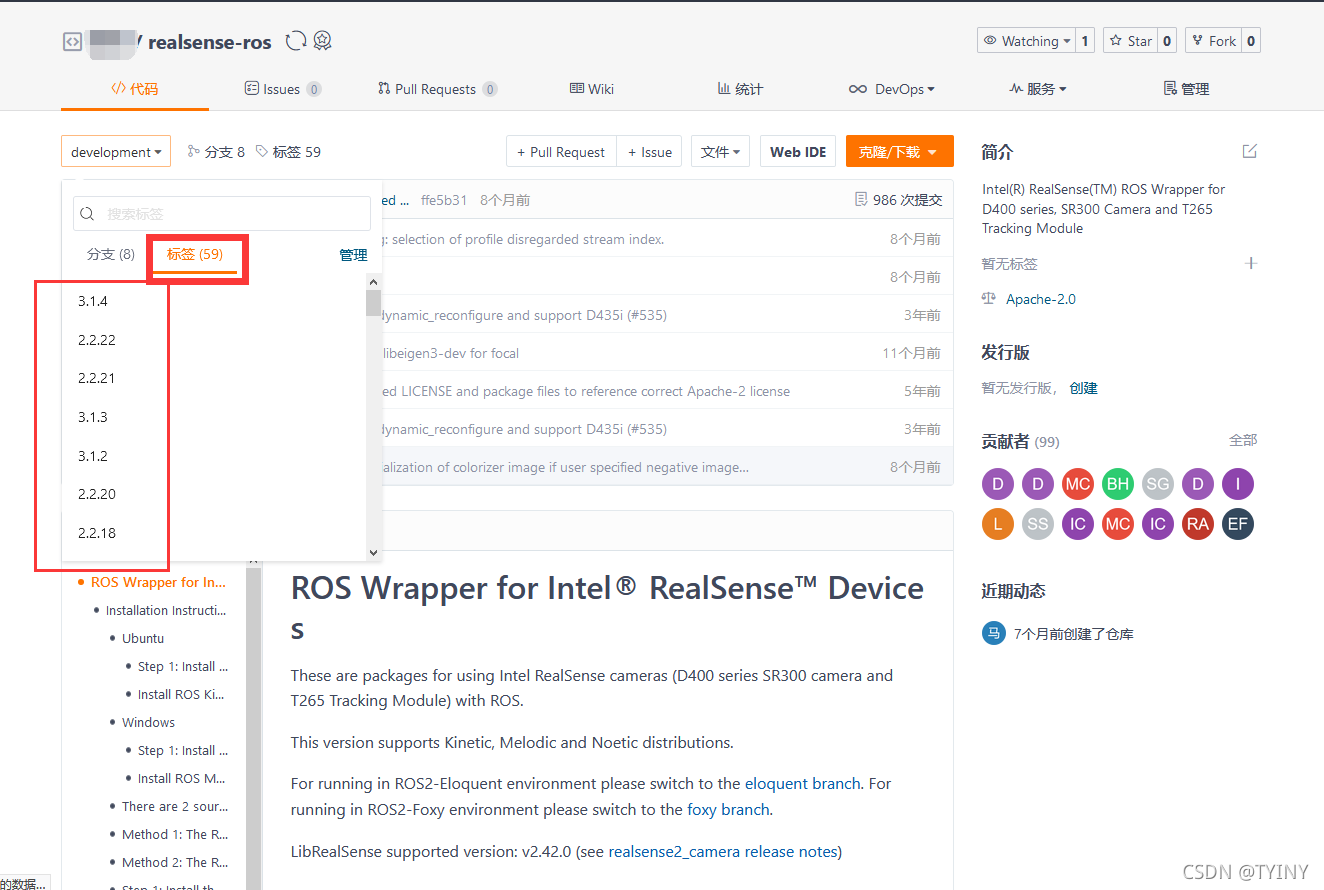
可以看到2.2.15版本的realsense-ros的realsense2_camera功能包的cmakelists里面要求的librealsense版本是2.36.0
realsense2_camera/CMakeLists.txt · 马熙/realsense-ros - Gitee.com














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









