







4.舵机+超声波循环扫描
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
你好,我是爱吃鱼香ROS的小鱼。本节我们尝试将超声波的舵机结合起来实现循环扫描功能。
一、新建工程
新建example20_simple_laser
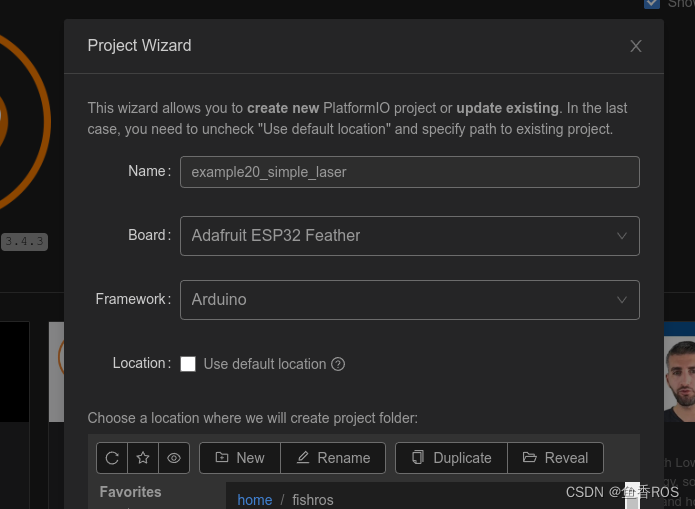
添加依赖,这里顺便吧microros的添加上,下一节直接使用
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
board_microros_transport = wifi
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
madhephaestus/ESP32Servo@^0.12.0
二、编写代码
原理是先控制舵机走到某个角度,接着调用超声波测量距离,这里小鱼将超声波测距离封装了一个函数,并用一个数组存储10个历史数据。
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <WiFi.h>
#include <ESP32Servo.h>
#define Trig 27 // 设定SR04连接的Arduino引脚
#define Echo 21
Servo servo1;
float get_distance(int angle)
{
static double mtime;
servo1.write(angle); // 移动到指定角度
delay(25); // 稳定身形
digitalWrite(Trig, LOW); // 测量距离
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10); // 产生一个10us的高脉冲去触发SR04
digitalWrite(Trig, LOW);
mtime = pulseIn(Echo, HIGH); // 检测脉冲宽度,注意返回值是微秒us
float detect_distance = mtime / 58.0 / 100.0; // 计算出距离,输出的距离的单位是厘米cm
Serial.printf("point(%d,%f)\n", angle, detect_distance);
return detect_distance;
}
void setup()
{
Serial.begin(115200);
pinMode(Trig, OUTPUT); // 初始化舵机和超声波
pinMode(Echo, INPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态
servo1.setPeriodHertz(50); // Standard 50hz servo
servo1.attach(4, 500, 2500);
servo1.write(90.0);
}
void loop()
{
for (int i = 0; i < 180; i++)
{
float distance = get_distance(i);
delay(10);
}
}
三、下载测试
连接好超声波和舵机。
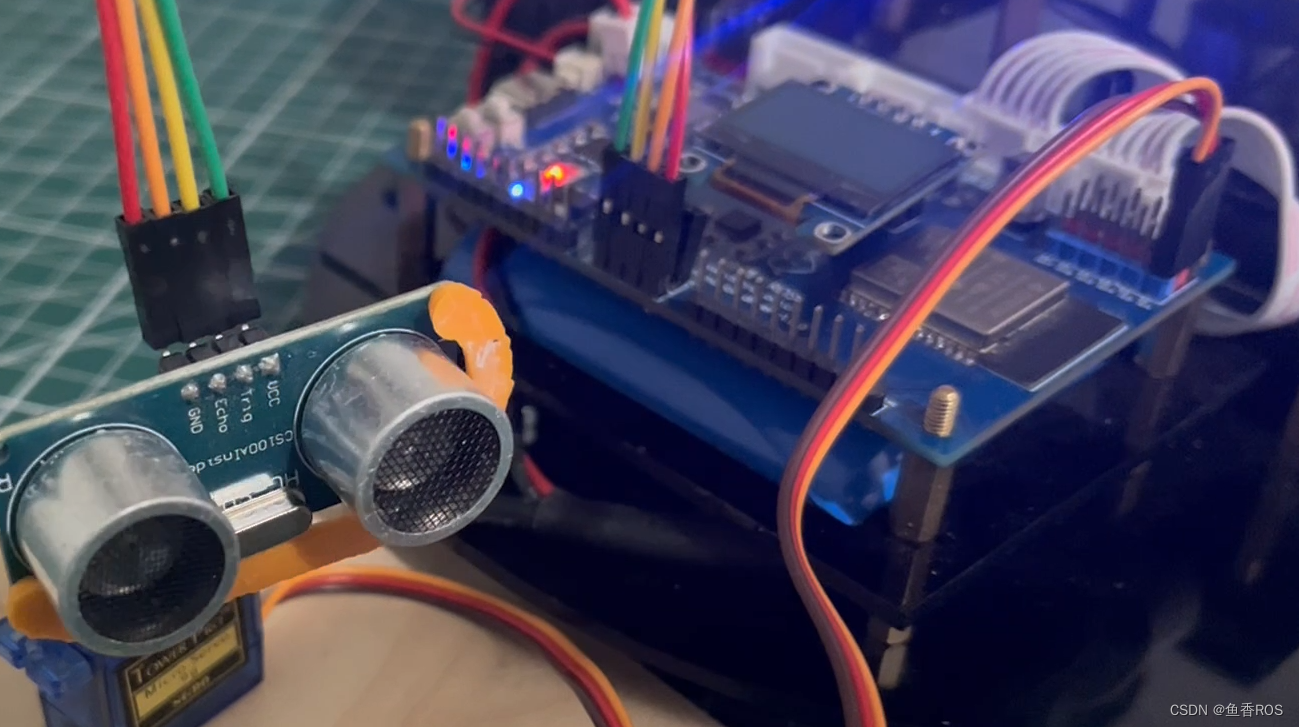
下载代码,观察串口输出
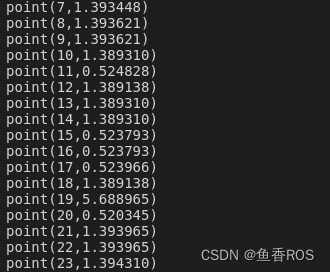
这里显示的就是角度以及距离信息。















 491
491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









