








我现在发现优化在深度学习,路径规划,SLAM(后端优化,图优化)里面都有用到!!!
有必要系统总结一下了。
https://baike.baidu.com/item/%E6%9C%80%E4%BC%98%E6%8E%A7%E5%88%B6/1707071?fr=aladdin
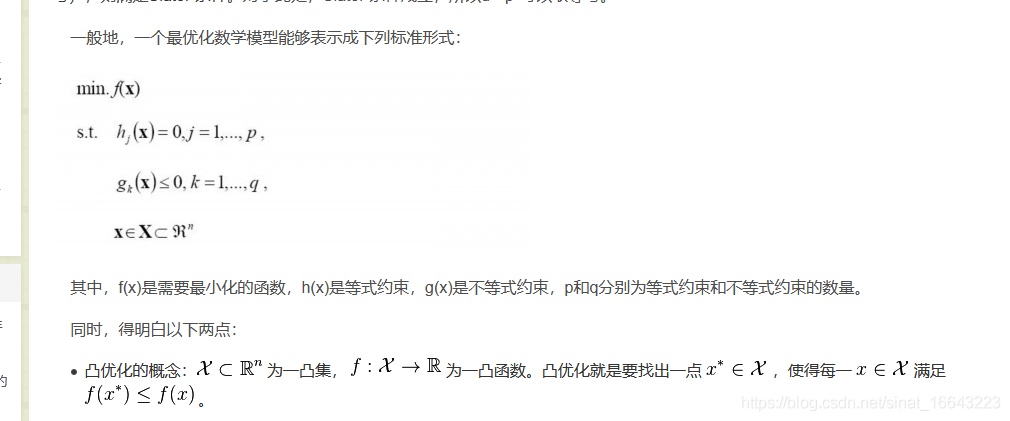
拍自《视觉SLAM十四讲》
SLAM里面的最优化问题应该属于最优估计,是不是最优化问题可以分为最优估计和最优控制!!!
梯度下降不也是深度学习里面训练参数用到的么?
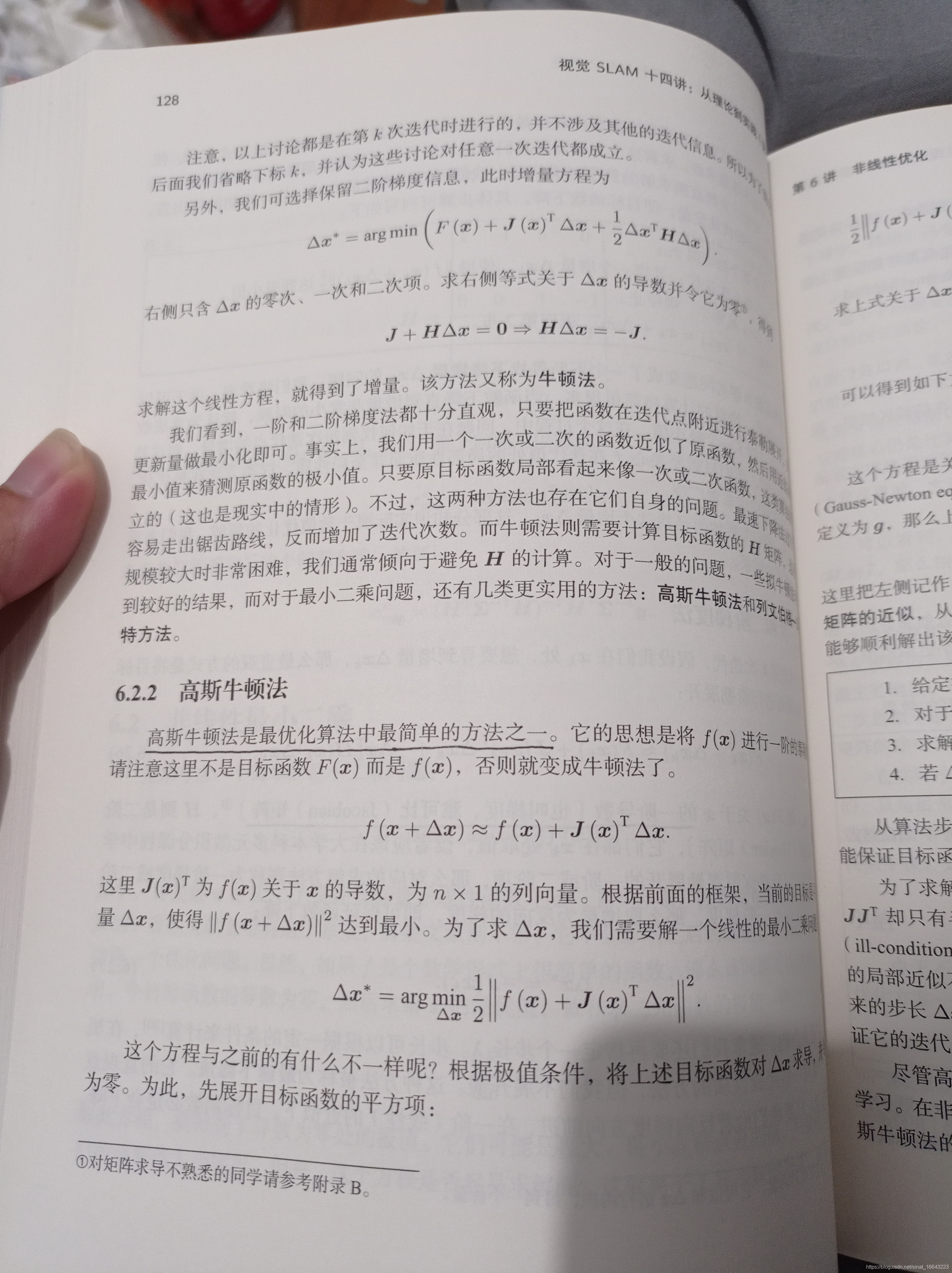
下面拍自《视觉SLAM十四讲》
还有最优跟踪和最优调节。
https://blog.csdn.net/sinat_16643223/article/details/109128791


是否VIO我们可以看做一个最优化问题。
多传感器融合,是不是也是一个最优估计也就是一个最优化的问题?
或许现在可以明白为什么这里可以同卡尔曼滤波替代态度下降算法进行神经网络的训练,以为本质都是优化算法?

卡尔曼滤波是线性最小方差估计,其实也是个最优化问题?
《百面机器学习》里面就专门有一章谈优化算法
所以神经网络的训练其实也是一个最优化问题?所以真正有着扎实理论功底的人,神经网络并不是一个独立的东西,本质还是可以看作一个最优化问题。

SVM也是在寻求一个最优解,最优分类平面。它的这个最优似乎就是靠的最小二乘法。
https://blog.csdn.net/v_july_v/article/details/7624837
2021.8.10
这篇文章也可以提下这一点
https://blog.csdn.net/sinat_16643223/article/details/119548335














 713
713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









