










首先pixhawk 4上面只有四个串口,一个给了GPS,一个是TELEM1 一个是TELEM2 一个是UART&I2C B 对应接口可以参照下面holybro的pxihawk4的飞控板。也是阿木所用的飞控板。

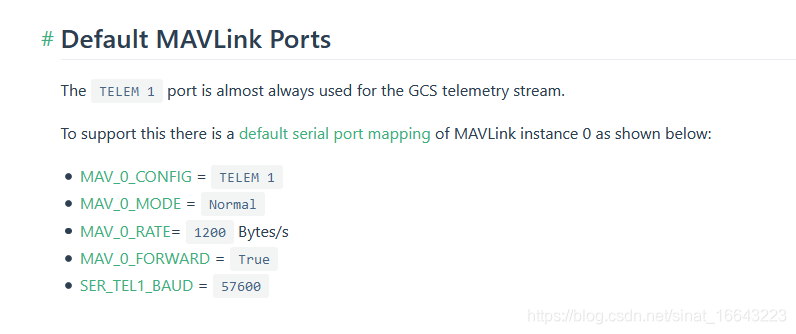
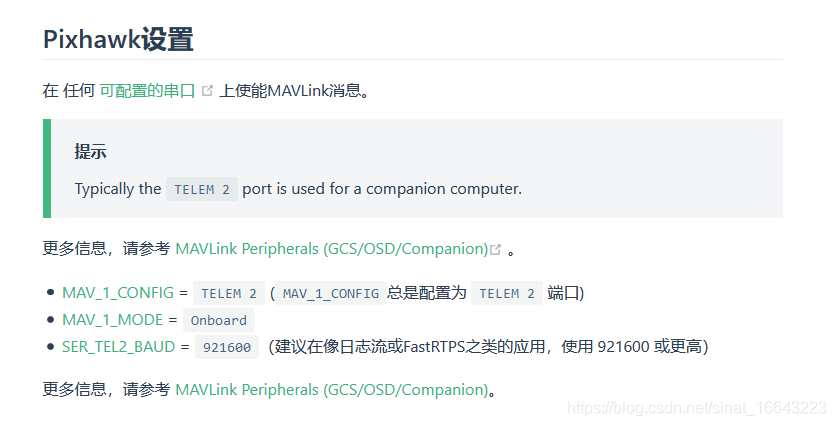
一般TELEM1插wifi数传,TELEM2插板载计算机,PX4的用户指南默认这么设置的
https://blog.csdn.net/sinat_16643223/article/details/119535123
 插wifi数传和插板载计算机所用的串口实际都是传mavlink消息,所以telem1口和telem2口都是设置的MAV参数
插wifi数传和插板载计算机所用的串口实际都是传mavlink消息,所以telem1口和telem2口都是设置的MAV参数
https://docs.px4.io/master/zh/peripherals/mavlink_peripherals.html
 https://docs.px4.io/master/zh/companion_computer/pixhawk_companion.html
https://docs.px4.io/master/zh/companion_computer/pixhawk_companion.html
那么我们要再装比如tfmini这种是串口的传感器,就只剩下UART&I2C B(飞控板上打印的是这个)这个串口了,也叫TELEM4
在选择tfmini的串口的时候是有这个选项的。
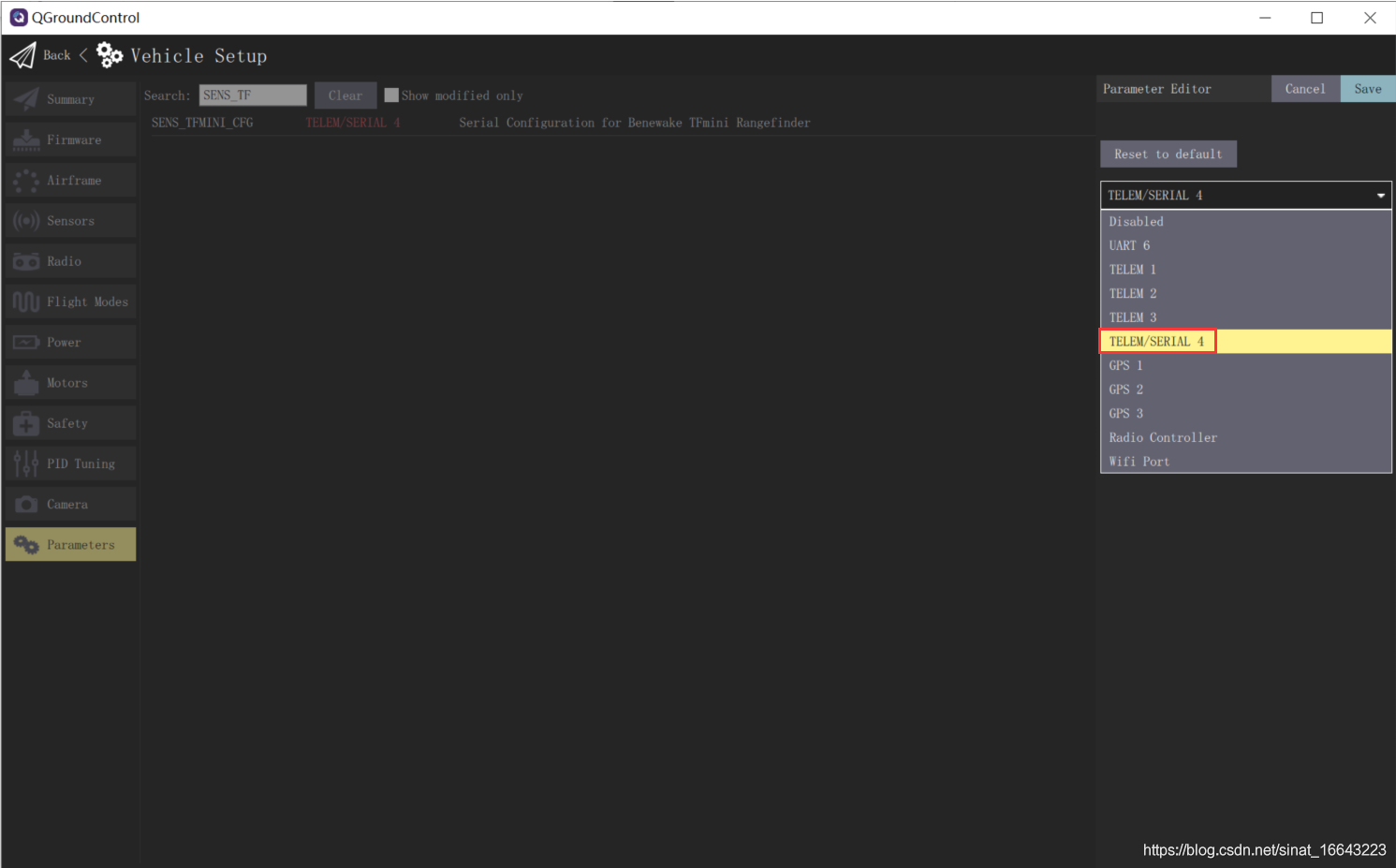
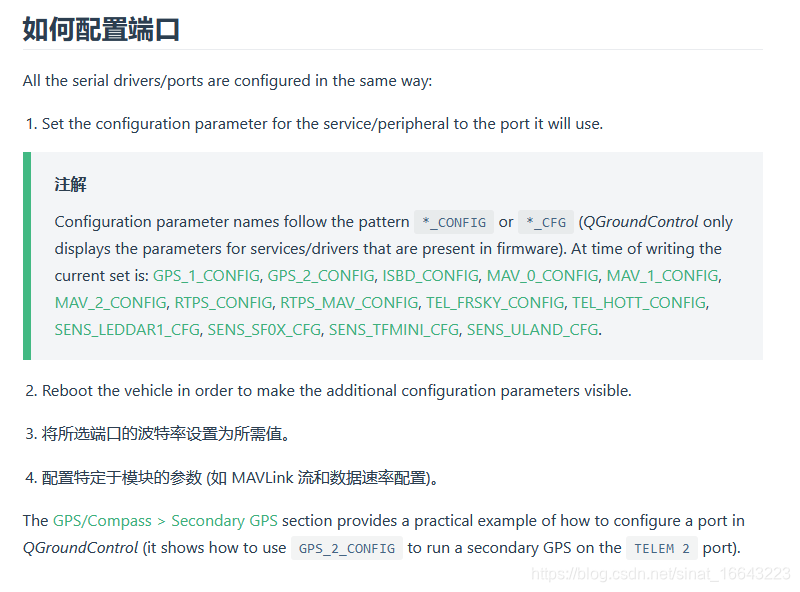
而且每一个是串口的传感器,都是有对应参数去选择自己的串口的,这是必不可少的设置,对于串口的tfmini(SENS_TFMINI_CFG)和串口的光流模块thoneflow(SENS_TFLOW_CFG),第二个串口GPS模块(GPS_2_CONFIG),都是如此。
还要设置对应串口波特率。
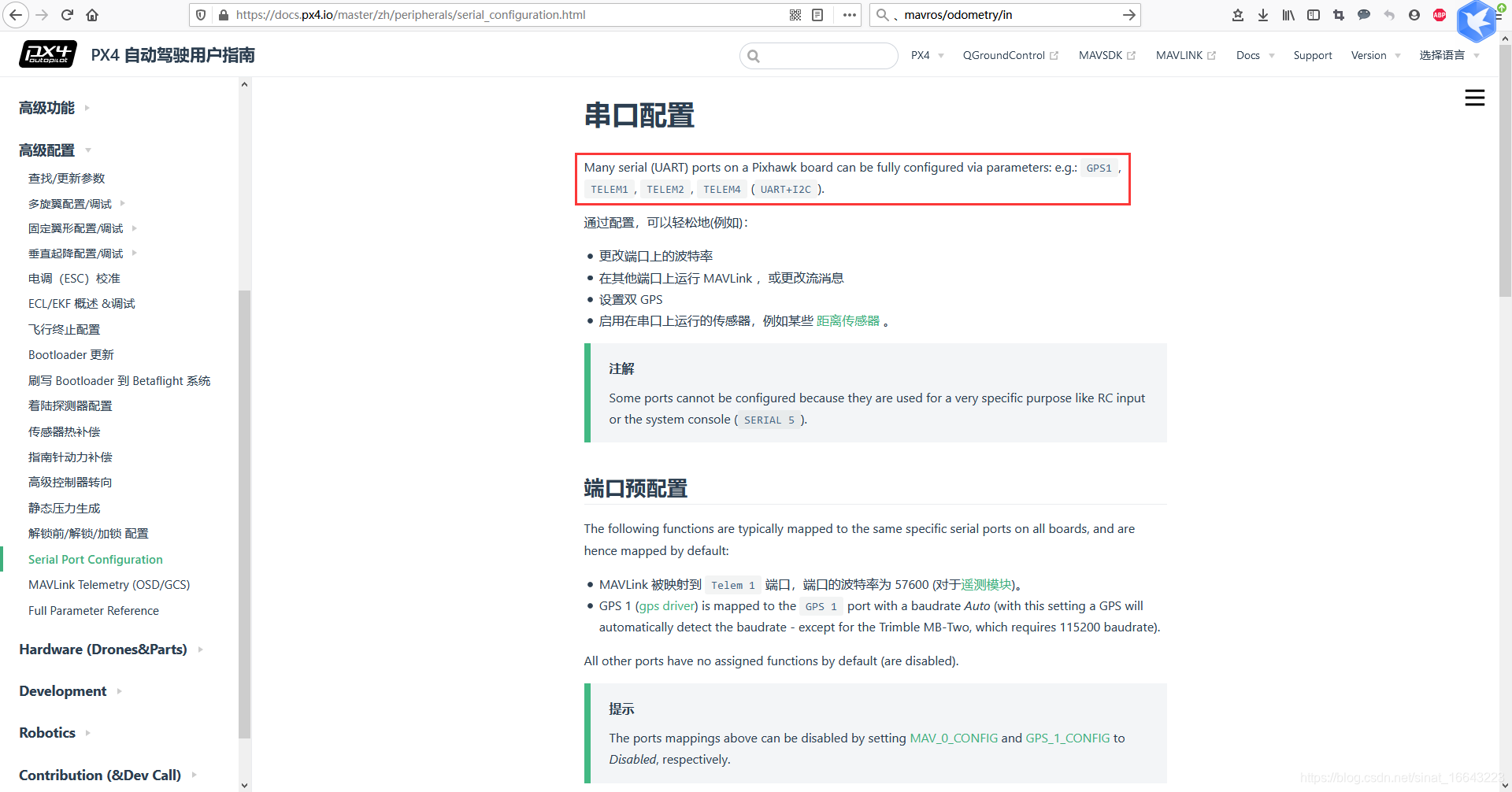
https://docs.px4.io/master/zh/peripherals/serial_configuration.html
清楚了一些本质之后PX4的串口应该可以灵活使用设置,而不是死记是这样的设置。


















 4922
4922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











