









把gazebo ROS PX4的关系彻底弄清楚
PX4和ROS之前的关系还是很明晰的,不管真机仿真都是通过MAVROS来的。
那么剩下的就是ROS和gazebo PX4和gazebo了。
首先参照这里说的,gaxebo是独立于ROS的,ROS的gazebo功能包应该只能算插件。
https://blog.csdn.net/sinat_16643223/article/details/116429085

似乎最后都是一个launch启动的,gazebo和PX4都作为一个节点了?PX4的一些参数设置也可以卸载launch里面了,这样就不用手动连QGC改了。。
make px4_default gazebo这样启动的gazebo应该是和ROS没关的。
https://gitee.com/amovlab/Prometheus/blob/master/Simulator/gazebo_simulator/launch_basic/sitl.launch
15:00:35
真机上我们只需要去掉launch里的PX4节点,gazebo节点,加上真实传感器节点似乎就可以了
15:01:13
这样仿真和真机是可以快速移植到的,这样开发就非常方便了
15:29:49
我希望我后面可以非常灵活地使用仿真进行开发
像同事那样
15:29:50
gazebo和px4应该都是通过一些插件接入ROS
15:29:50
本质都是独立于ROS的,可能就像把串口接入ROS一样?
下面这是以前的理解,现在需要更进一步了。
https://blog.csdn.net/sinat_16643223/article/details/116352796

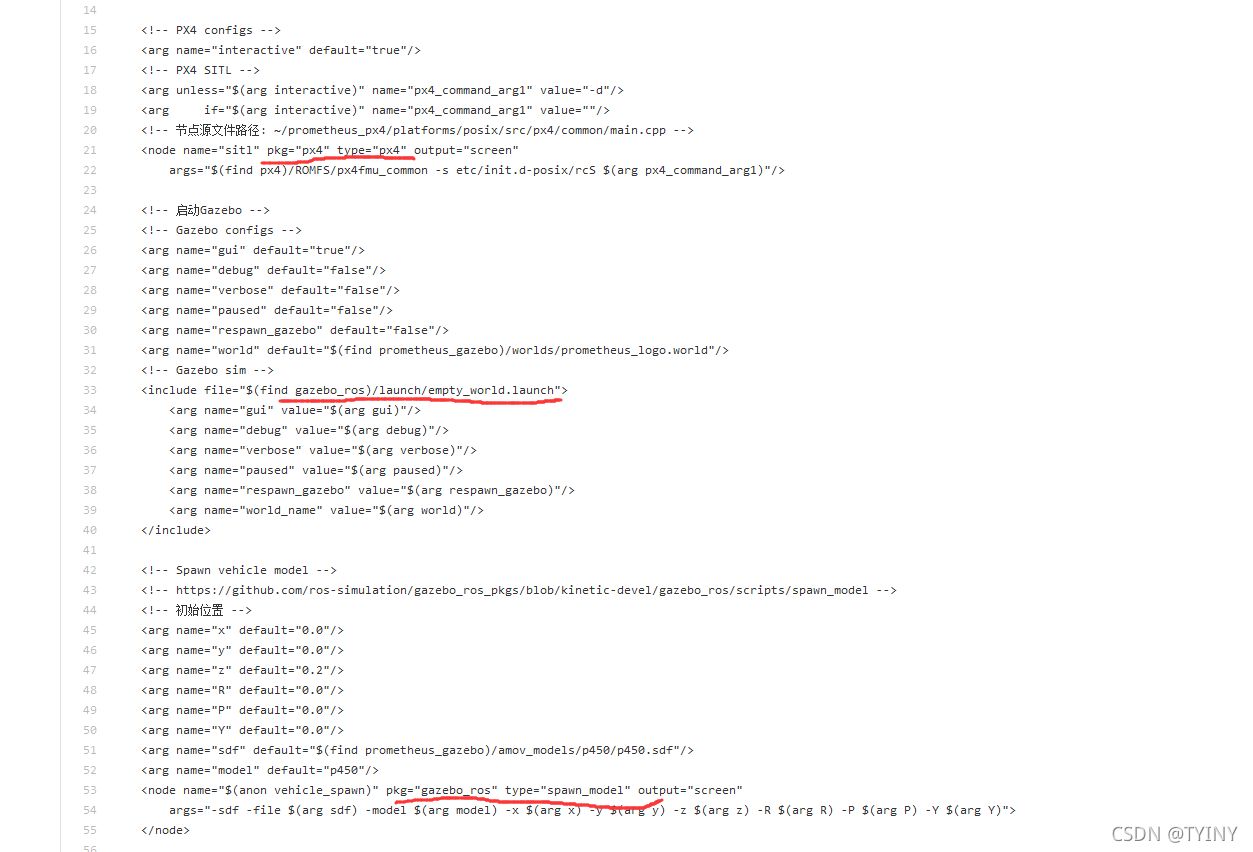
其实这三个分别对应 PX4 加载世界 加载无人机模型。我们改动其实无非是改动世界或者改动无人机模型。所以你想仿真的时候跑vins,只需要换个复杂点的世界模型加载就可以了,其他的都不需要动,就这么简单。
https://gitee.com/amovlab/Prometheus/blob/master/Simulator/gazebo_simulator/launch_basic/sitl.launch
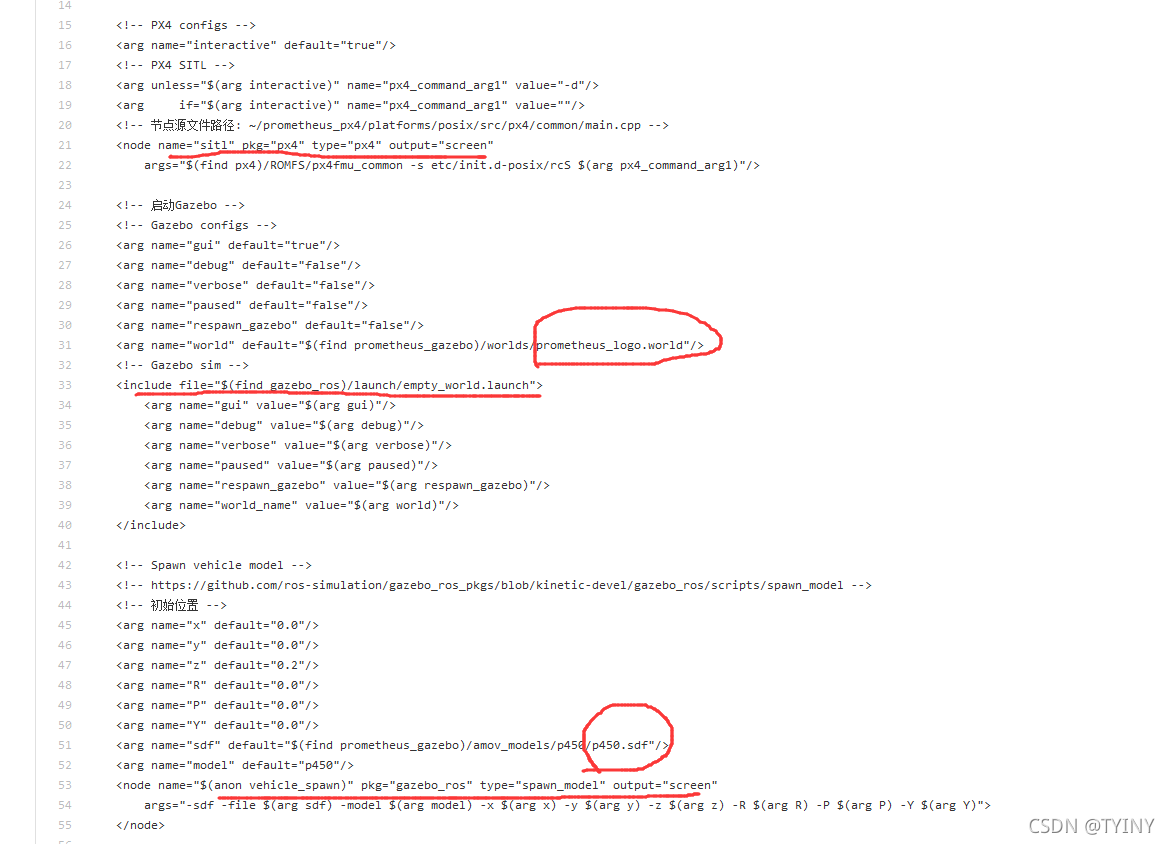
这里也说了gazebo仿真二次开发就涉及到这三个文件夹,其实普罗米修斯的gazebo仿真模块里面也是有对应的models和worlds文件夹的。
https://zhuanlan.zhihu.com/p/337919677



















 1332
1332

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











