









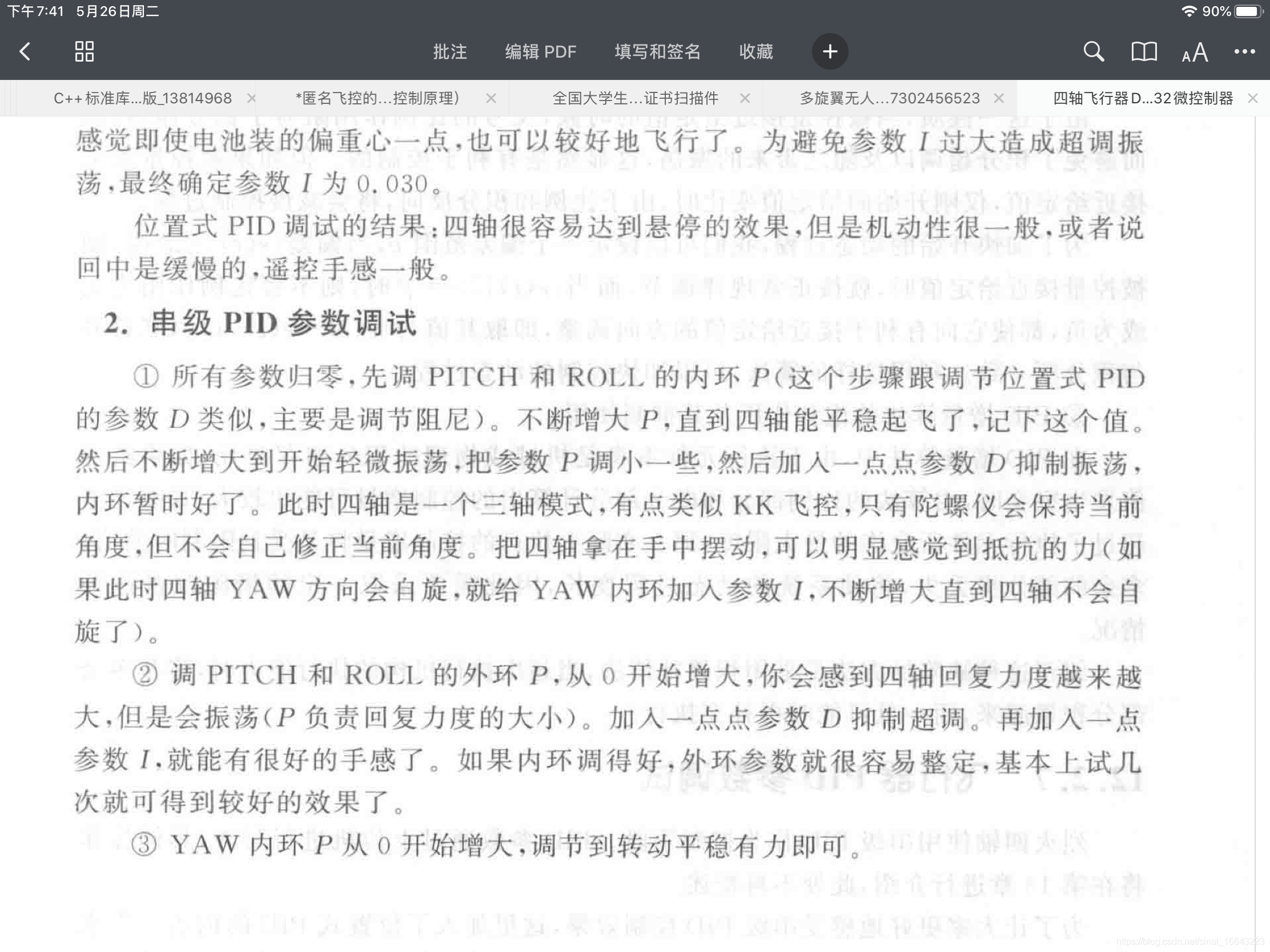
似乎都是先调内环,也就是先调俯仰角和翻滚角,偏航角先不用调,因为俯仰角和翻滚角调好了飞机就可以稳起来飞了,偏航角调不好无非是会自己转,但是飞机摔不了。
正点原子也是这么说的。
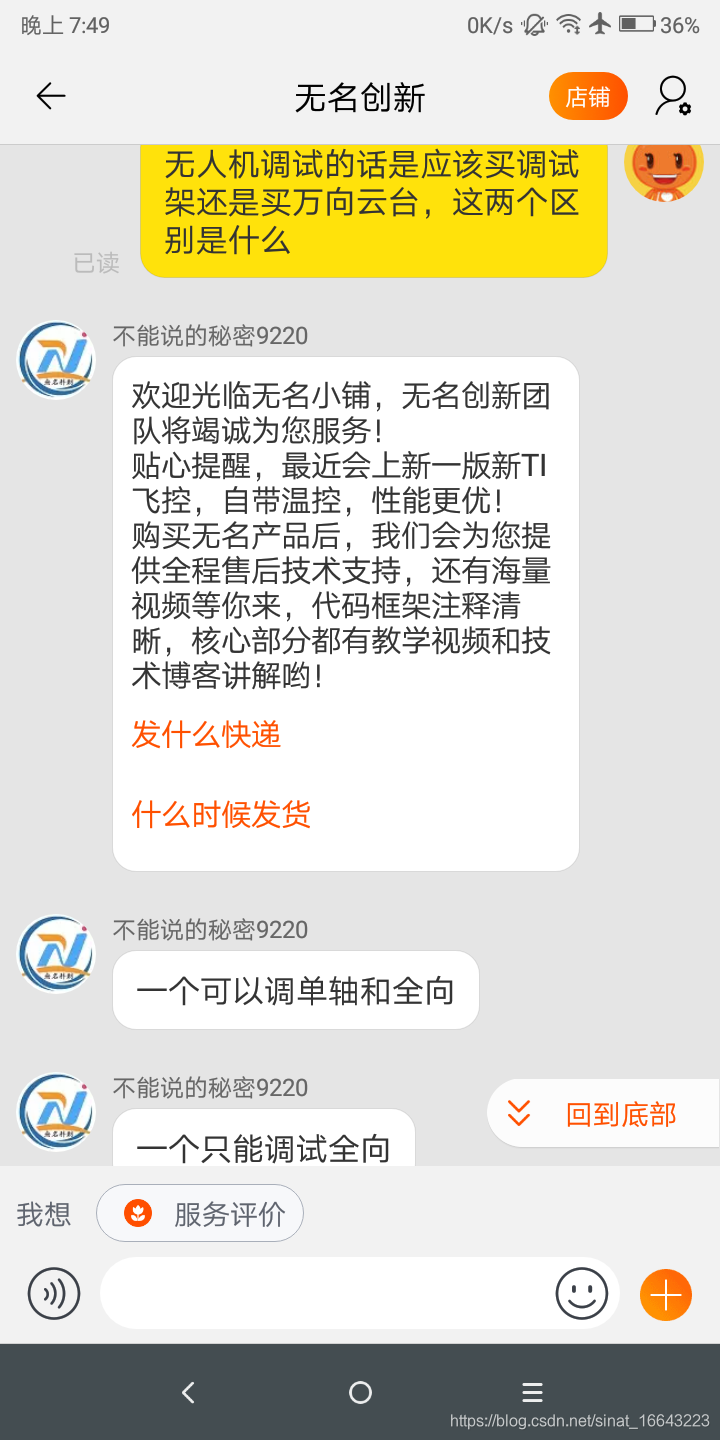
怪不得他们调无人机是先绑在一根杆子上。调试架和万向云台的区别可能是,调试架不能调偏航角。所以为什么要调试架和万向云台一起买。

《四轴飞行器 DIY 基于STM32微控制器》
正点原子的开发指南也有教我们怎么调,我感觉还是正点原子想得周到,让我们能够用一根绳子就可以自己调参数了,着可能也是小型无人机得好处,大型无人机还得买调试架,所以还是小型无人机适合学习。


https://www.bilibili.com/video/BV1Bg4y1B7cU?from=search&seid=6004283296687917196



















 4946
4946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











