









 本文记录了一位无人机爱好者从2020年初至今的飞行调试经历,详细描述了使用多种无人机(包括正点原子、匿名、无名、Pixhawk等)在不同场景下遇到的问题及解决方案,涉及光流模块、定高模式、GPS定位、电机调整、遥控器校准等关键技术点。
本文记录了一位无人机爱好者从2020年初至今的飞行调试经历,详细描述了使用多种无人机(包括正点原子、匿名、无名、Pixhawk等)在不同场景下遇到的问题及解决方案,涉及光流模块、定高模式、GPS定位、电机调整、遥控器校准等关键技术点。
2020年
最开始是⻜原⼦的,没装光流模块的时候基本⻜不成,四处乱⻜,我甚⾄还拿着⼀根绳⼦绑着,浆 摔断过⼀个,还拆错了,换了之后⻜不起来,因为两个浆装反了,正好四个浆的⼒抵消了
1⽉17⽇上午第⼀次⻜匿名的,起⻜之后⻜机是定⾼的,但是⼀直往机尾那个⽅向⾛,控制它降落 不稳,都是因为降落,炸了好⼏次,⽽且那个时候不知道⽤遥控器调模式。他们说明书也看不懂。 最后⼀次⻜,⽆⼈机突然⼀下⼦⻜好⼏层楼⾼,吓得我赶紧下打油⻔,它似乎在空中停转重重地摔 下来。⼀个记忆,脚架都摔断了。我现在怀疑我把定⾼模式关了。
1⽉20下午开始⻜⽆名的,也是降落,⽆名的降落你⼀次性把油⻔打到底,⽆⼈机触底之后⼜会⻜ 得很⾼再下降,这样摔了⼏次,最后断了两条腿,我回来,他们淘宝说发不了货今年,我于是想办 法重新给它做了四条腿,再去⻜,降落依旧有问题。我后⾯⼜去学校篮球场⻜了下,可能我当时想 找个⼤点的地⽅,结果,当时忘记打开定⾼光流了,⽆⼈机⼀下⼦也⻜得⽐较⾼,我急忙降落,断 了⼀个腿,接收机模块也甩掉了。你会发现没打定⾼光流时⽆⼈机操控起来⼿感就不⼀样,变得很 敏感,你轻轻⼀碰它可能就⻜得很⾼。这天没有解决降落问题。
1⽉21⽇ 我在20楼⾛廊⼀个⼩隔间,试着就⻜⼀点点⾼,再降落,这样可以稳稳降落,于是这提醒 我,我降落时可以先把⻜机降得⽐较低,再降落也就是把油⻔打到最低。
于是我去地下⻋库试了下,地下⻋库似乎因为灯光⽐较暗,定点效果感觉有点差,就是总是飘,然 后我想让它降落它⼜犯⽼问题⻜得很⾼打到天花板的钢板摔下来,⼀个轴摔得有⼀点点弯。⽽且后 ⾯发现⻜控板的那个⼀个软胶都掉了,回来重新装上
再去楼下外⾯⻜,忘记开定⾼光流导致⽆⼈机最后⼀头撞上路边,有两个腿都撞歪了。浆也断了两 个,这⾥我也发现⼀点就是没有开定⾼光流时把油⻔打到最低它是可以⾃⼰很好降落的,反⽽打了 定⾼,你⼀下把油⻔打到最低,它反⽽不能很好降落。
回来重新装好浆,把腿弄正,再下去⻜,Ok了,确实可以先把⾼度放低再降落,这样就可以稳稳降 落了。
⽽且我发现它⼜个轴撞歪了斜了依旧还可以⻜。
今天完全实现了起⻜和降落,真的是摔了⽆数次,都是降落这个阶段,匿名的那个也是的。
6月7日我在京东上买了个99元的迷你无人机,实际买来之后发现跟没装光流模块的正点原子的无人机差不多,这种估计是给小孩当玩具,或者当穿越机,而且我估计得在非常空旷的位置飞,在一个小房间内飞很容易飞起来之后就往一个方面偏然后撞到墙上,你就算遥控器控制也不好控制,最后看你依旧是撞到墙上,或许空旷地带好些,我没去空旷地带试过,反而看到不难光流定点我就退了。
6月22日,电池五个月没用好像还有12.3V,无名的无人机自己从武汉运回来之后试飞了一下,没什么太大问题,就是可能之前因为一个轴有点弯了,导致定点悬停时没那么稳定,甚至会自动改变一点点偏航角。这个之前一月份那个轴摔弯之后好像就是这样,所以应该不是运输的问题,对,快递运输倒是把一个浆弄弯了,下次运无人机还是把浆弄掉吧,拆之前先拍个招聘,这样再装应该不会弄混了,所以我还是先换个轴吧。
对,好像有个电机似乎出了点问题,偶尔不灵敏好像。不知是不是因为快递弄坏了?还是之前摔坏的?
好像定高也不太灵敏了,无人机再定高下会自动缓缓下降,难道是因为我放在床上的原因?可能是的,我放在地板上似乎定高没用问题。
之前出现的降落反弹的问题依然存在,特别是你降落时想直接把油门打到最低,这种它可能降落得比较猛(明显感觉到有一震,特别是硬地面),触底后可能反而弹得比较高,之前得策略就是先降得比较低再最后把油门打到零最好。也没有可能是因为触底得时候那个震动太大,三轴加速度传感器,应该有个突变值,会不会是这个有影响????我感觉可能是这个?向上的加速度猛地一个方向过大,无人机那时可能还是一个自稳 ,它要保证这个加速度为0啊,做的一个负反馈就立马往上飞了?因为竖直方向是有个加速度环的,我觉得这个可能在起作用。竖直方向的控制环的输出又是直接影响的油门,你看看PID的式子嘛,PID的输出就是偏差的函数嘛,偏差突然变大,那个输出很可能也是突然变大,我怀疑是不是应该加个滤波。你会突然发现实际做无人机和理论分析无人机的控制模型,实际比理论要复杂考虑的因素要多,竖直方向绝对不是单纯三环串级那么简单。你看看你降落就出问题了。所以弄无人机不难单单在那看代码看论文,却自己没用真正去飞。这也让我感觉,越是水或者菜的越是喜欢谈些空而高大上的,简历也写得很牛逼,牛逼的项目,真正有经验做过无人机的应该是有敬畏之心的,知道没那么简单,反而可能是踏实回归基础,你把一些基础,一些细节做好已经很不错了!真的是懂得越多越有敬畏之心,之前简历上随便写个无人机觉得没什么大不了的,后来发现真的很多深层的东西。但是往往自己比较差的就越是想写得自己很牛逼嘛。你写的项目越大就越不可能是你自己写的,C也是的,真正自己动手开始写都是从什么排序,数据结构那开始写。网络编程你也别找什么大项目,写个HTTP服务器出来就很牛逼了,真的,关键是你自己写的。
无人机实际的飞就像实际的考试,这个你自己骗不了自己,就像考研,实打实的分数,要想提高也是一点一点地提高,得面对现实。在实践中提升,唯物地提升。不然很可能你书看得再烂,结果考试分数就那样,找工作那就早点去面试,看看现实情况什么样,很可能你自己觉得准备很充分了但是现实比你理想的要复杂得多。得去啃硬骨头,而不是只在那看书自我感觉良好,实际不敢动手做。
布织品是不是会吸收超声波?


这种小细节真的是得在实践中积累。
6月24日,今天把那根摔弯的轴换了,再分无人机就变得稳定了,真的,不会说偏航角都自己变动。
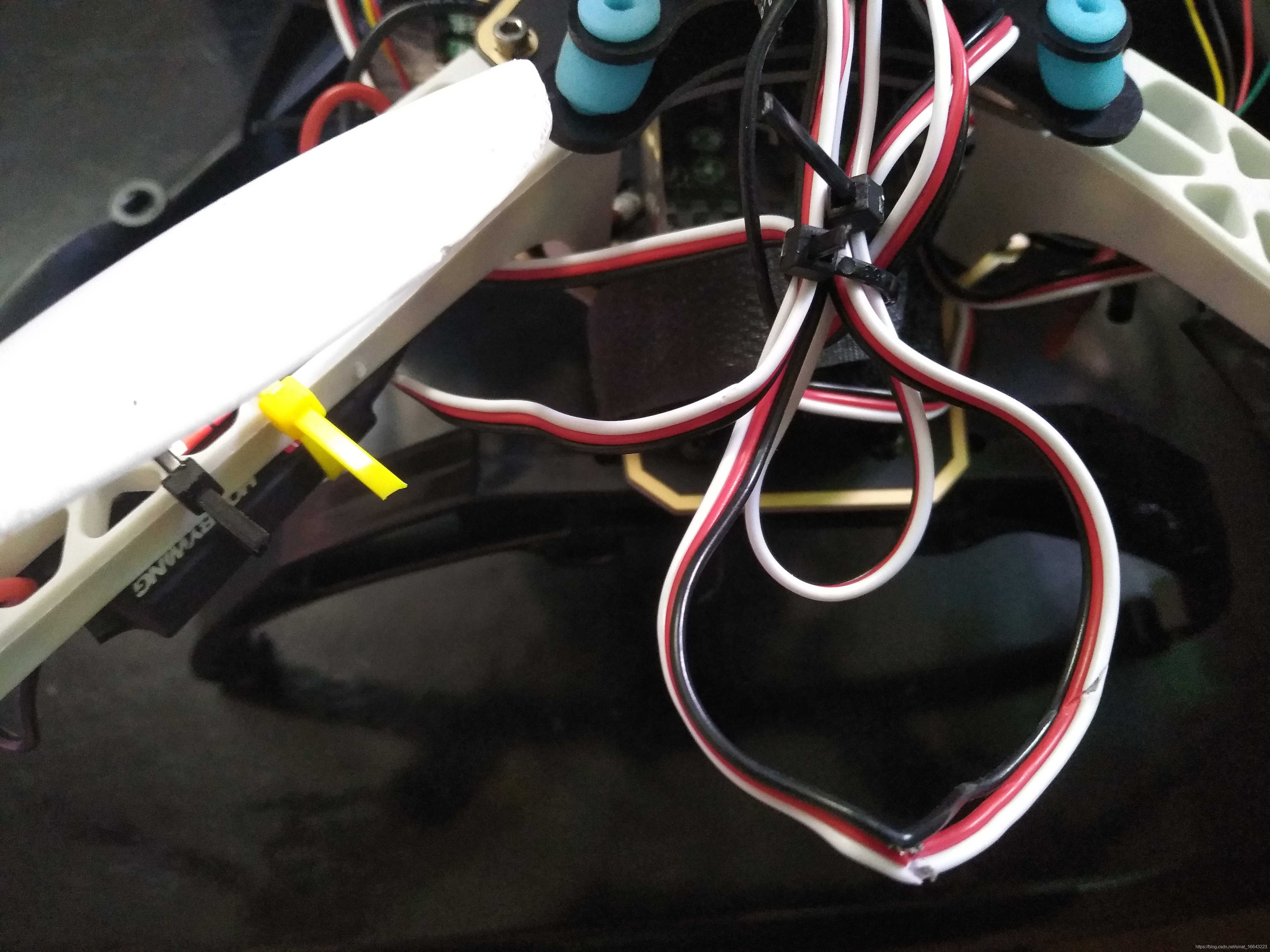
今天还装上了护栏,免得浆再打破了,那样浆会很快用完,出于此考虑还是装上护栏,附上刚拍的图。
6月26
我拿到光滑地板上和室外发现都是会自动缓慢下降在定高模式下,
还有一定不要再狭小的室内飞,很容易把浆打坏!!!!!!!!已经这样很多次了,还是在宽敞的室外飞比较爽!!!!!!!!!一定不要再在狭小的室内飞了!!!
我记得无人机如果不切到定高的话,可能你波动一下油门无人机就会立马窜得很高,之前焊机啊在学校篮球场那次就是这样。
这时候怀疑之前匿名那次突然窜得非常非常高是不是因为定高档没有打?
无人机起飞就往一边侧翻可能是因为有一个浆裂了。环了之后似乎就好了。也可能是因为浆的原因导致定点飞行的时候不稳定,总是有时候突然扰动一下又恢复。所以你别看无名的视频上面断浆裂浆都可以飞,还是尽可能保证硬件的完好,很多时候飞得不稳很可能是因为硬件比如轴弯了,浆裂了。单靠软件算法可能是不够的。浆裂了哪怕裂一点也即时更换,毕竟浆在飞行中承受的力还是比较大的。
我拍了视频问了下无名,无名让我遥控器行程校准一下,我遥控器行程校准了,不过没什么大的改变,不过给了我一个新的思路,可能是我的遥控器,果然我遥控器油门值给大一点就能差不多保持定高,不能打在中间,打在中间就会缓慢下降,会不会是因为我的无人机变重了?基础油门值要变大一点才行,之前他们给定的基础油门值小于无人机的重力可能,
还有一个是我以前遥控器稍微往上拨一下就可以起飞,现在得拨到顶才可以起飞。难道是遥控器的值变小了?莫非是遥控器出问题了?
现在真的可以自己手动解决定高的问题。感觉有点人肉PID,自己看实际情况给定油门值。还是这种正面去应对解决问题比较好,而不是再去买一个无人机。
油门得拨到下面这种程度才能马马虎虎定高。
这给了我一个启发就是一个飞控装到一个新机架上你可能不用太担心机架重量不同,这个基础油门值可以自己随时遥控器调啊,对不对,所以我觉得真的不用太担心这个,大不了油门打大一点或者打小一点嘛,根据肉眼看效果,就行了。看它是往上升还是往下降。你看我这个无人机都打到这种程度了,其他无人机还怕什么。可以自己很灵活地手动来调。同样如果我在无人机上面加其他的部件变重了,也不怕,可以把油门加大点。

现在也渐渐清楚了各种校准,之前可能还不清楚那些校准 。我今天弄了加速度计校准,遥控器行程校准,电调行程校准,就没有校准磁力计了。\
还有原来富斯 FS 是FLYSKY 怪不得是无人机遥控。
加速度计校准可以看
https://www.bilibili.com/video/BV1FW411o7od
上面这个是错的,上面这个实际是水平校准,我6月30号,7月1号和无名客服聊才发现
实际加速度计校准是六面校准,这个飞控的说明手册里面有,而且确实六面校准后无人机就可能正常定点悬停 不会自动缓慢往下降了。
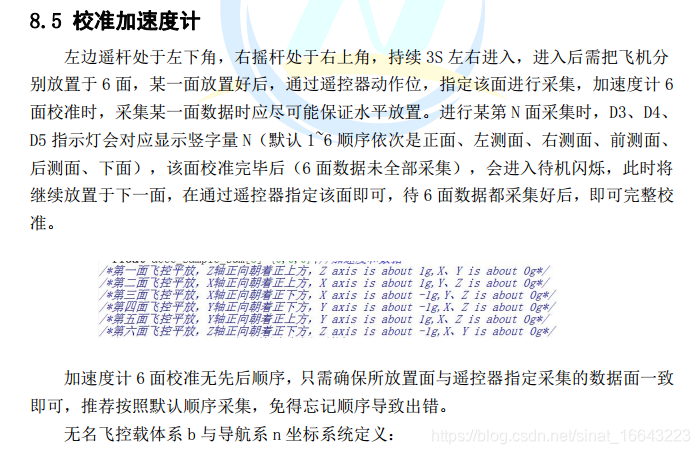
视频也应该是看这个视频。直接在无名的B站里面搜加速度计。
https://www.bilibili.com/video/BV1it411k7CJ

遥控器行程校准可以看
https://www.bilibili.com/video/BV1PW411c7Ht

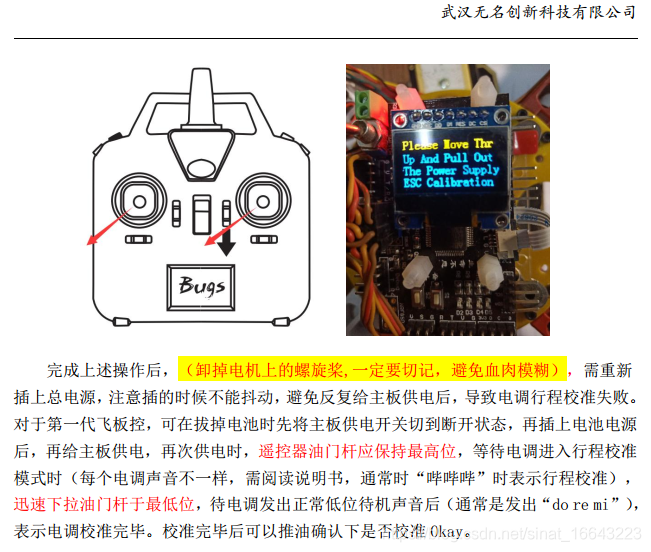
电调行程校准可以看
https://www.bilibili.com/video/BV1it411k7kS
6月26
今天去飞了下,是昨天电调行程校准后第一次飞,感觉没什么改变,依旧油门要打大到那个程度才能差不多实现定高。
超声波传感器应该是有用的,因为无人机接近地面的时候无人机浆会自动减速,应该是感应到了的。
我发现有问题然后你去解决问题的这个过程会促使你不断去深挖弄懂一些东西,这个我感觉挺不错的,很多时候你不弄懂也做不出来实现不了。这个过程反而能让人成长学到东西,当初做平车也是,最后你没有真正弄懂也做不出来。
一些东西没有弄懂出现问题你是解决不了的。
现在可以思考一个问题,就是无人机的油门量是遥控器给的,还是竖直方向的控制环给的?按照北航那本无人机书的理论,遥控器控制时是遥控器给的,遥控器没控制时就是自己控制的,那我什么时候才算遥控器没有控制呢?
6月27
现在很明显的一点,就是打同样的杆,无人机的那个转速要比以前小很多,以前无人机起飞时,只需要油门杆稍微打打就可以了好像,前几天,是油门必须打到顶才起飞,现在油门打到顶都起飞不了。
我感觉那个无人机油门杆打到1800左右才能差不多实现悬停也和这个有关应该。好好想想到底是什么原因,遥控器都校准这么多遍了。
讲道理,我之前弄个无人机的控制框架,遥控器控制时,一些量就是直接由遥控器给的,油门量应该也是遥控器直接给的。我看了飞控的显示器,遥控量给的没有问题,莫非是这个量转化为电机控制量的过程中出了问题?电调出了问题?
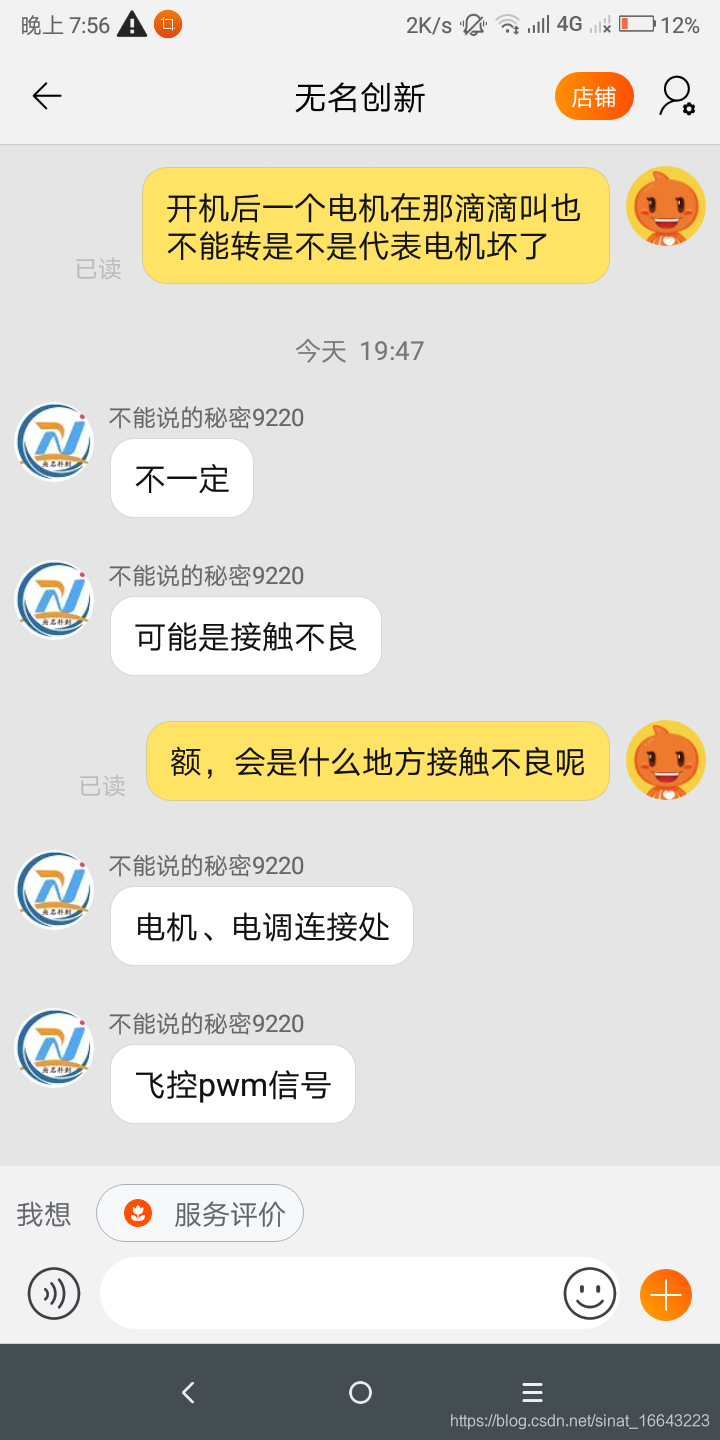
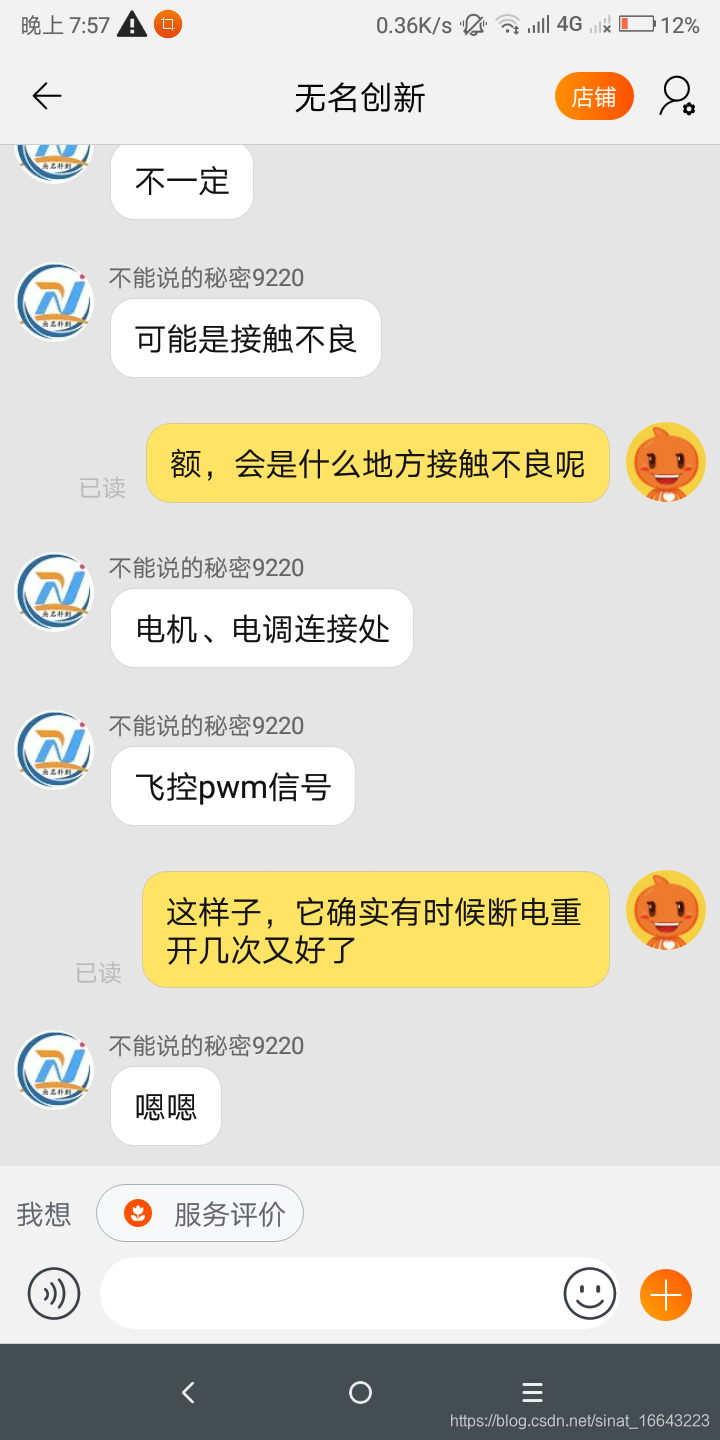
刚刚又吸取一个教训,原来我的电机很可能根本就没有坏,我是说怎么这么快坏这么多电机呢,有点受不了。很可能是接触不良!!!!!吸取教训吧。假如电机没有坏的话,我今天换了一个电机之后那个就没有出问题,而我换电机☞动了电机和电调的连接处,莫非是电机和电调的连接处接触不良?
还有你好像前天在院子里飞,无人机刚飞起来的时候偏航角会有一定小角度的改变,可能是因为刚开始最初始有两个浆转速不通,导致偏航角小角度改变,后面浆速稳定了就没有再发生改变,我觉得可能是这个原因。
6月30日
下午四点多试飞了组装好的Pixhawk无人机
实践结果是大名鼎鼎的pixhawk可能还不如无名,没有光流模块什么都不是!!!!!!
、
考GPS和气压计的定高定点简直是笑话,或许他们再空旷地带效果好点,就像无名在江边的效果?
我是一开始起飞发现它往上升,我油门应该拨到中间了,可能气压计不稳?,然后想赶紧让他降落,不小心拨到返航,可能当时慌乱又急,SWC应该由2拨到1 我拨到3去了,它就先升到15米(这是什么傻逼设计?),后面就一场惨烈了。
我感觉这个无人机跟着智障一样。
反正这个Pix无人机一起飞,水平反向肯定是不稳的,总是会往一个方向飞,可能是GPS漂移的原因?,竖直方向也没那么稳,可能因为它根本就没有精确的定高传感器!!!!
下次如果再飞Pix只能找个非常大的空旷地,
、
我感觉Pix只能靠SLAM来定高定点了。
PIXHAWK飞给我的感觉就像没装光流模块的正点原子和那个99元的无人机,真的,没玩手,基本上起飞就往一个方向偏,废了三次,前两次往机尾偏,最后一次往机头偏,唉,真的感觉跟没有光流模块的正点原子和99元的无人机,不好操控。
无名这边问题越来越严重,起飞都起飞不了了,我看显示屏遥控器给的值没有问题,那是哪里出了问题,现在解锁后我动油门杆电机转速都不变了。这里面肯定有个环节出问题了,如果遥控器给的值没有问题,这个值转化微电机的转速出了问题。
无名的无人机的电机上电后在那叫可能是PWM输出那块接触不良造成的,是的按一按似乎就好了,电调接触不良的可能性比较低,PWM输出口那理就几根杜邦线,很可能是那里没有接触好。
7月1日
无名六面校准加速度计之后已经可以实现爽飞了,光流定点很爽了已经
降落只需要注意不要把油门往下打得太猛了。
降落只需要油门往下打一点点它会自动匀速往下降,快接触到地面它会自动螺旋桨降速
关于降落,苍穹四轴的pixhawk无人机的快速上手指南也写了,不要油门急速拉低,很多时候确实可能就是我们很急切希望它降落,就一个劲把油门弄到最低,结果可能就是无名的无人机比较猛地触地,然后又弹起。今天飞出现 这样地情况,只是这次我发现它弹起来之后我控制得不错,我看你没有慌乱地去急着操控遥控器控制它,而是等他弹起来平稳了,再把油门杆稍微往下一点,它会自动慢慢匀速降落。这次就没有猛地触地之后失控,你之前可能就是它弹起来比较高,你又想它下降又去猛打油门,最后失控。
https://blog.csdn.net/sinat_16643223/article/details/107041880

电机很可能是飞控pwm输出口那块接触不良。
还是感谢昨天跟无名客服聊才真正发现问题,才意识到加速度计没有校准,我之前都是把水平校准弄速度计校准了,注意还是怪无名到手飞的那个视频就是弄的水平校准,但是他视频里说的是加速度计校准。就是这个视频:https://www.bilibili.com/video/BV1FW411o7od
实际加速度计校准是六面校准,这个飞控的说明手册里面有,
视频也应该是看这个视频。直接在无名的B站里面搜加速度计。
https://www.bilibili.com/video/BV1it411k7CJ

我现在拿到床上面去飞一样可以定高定点,所以不存在上面床单吸收超声波的问题。
目前来看,无名可以操控得比较好了,需要注意这么几点,解锁后,要起飞,需要油门打到最大几秒钟,它就会起飞,注意是油门打到最大,这和Pixhawk不同,pixhawk是油门超过百分之五十起飞。
降落时,只需把油门打到第二个横杠和第三个横杠之间就可以了,而且我测试就是遥感再第三个横杠和第6个横杠之间是可以保持悬停的,就是不会上下,超过这个区间才会上或者下。
注意还是注意降落的时候油门不用打大,就往下打一点点,它自动缓慢匀速降落,接近地面它的转速会自动降低。
刚刚下午四点多试弄了无名的用openmv物体跟踪,最开始去院子,操作其实很简单,只需要在原先定高和光流定点的基础上把SWC拨到2就可以了。在选自里把SWC拨到2后可以感受到它识别到了黑色方块,但是有些抖动和鬼畜,我一开始以为试那个黑的方块没做好上面有胶带可能反光啥的,我换个了黑色方块发现还是那样,然后我准备回去,在楼梯突然到可以拿家里白色地板试试,可能院子里的地本身就是灰色黑色的,我回来拿家里的白色地板果然不抖动鬼畜了,用衣杆移动黑色方块无人机也会跟着移动。
但是我发现一点就是在白色光滑反光地板上光流可能效果比较差,甚至可能没什么效果,起飞后直接往一个方向偏移。
无名的程序默认应该是识别黑色方块的,我看他的视频里面也是用的黑色方块。
还有能不在室内飞尽量不在室内飞,室内百分之八十会撞到东西,而且室内狭小得空间气流干扰也大。
7月2日
晚上,睡之前,发现一款与众不同的无人机,用的ADRC

7月4日
给F450装上了护栏,看起来很大,感觉F450还是大了点,拿出去飞估计也不方便。以后买机架尽可能买小一点的。

我感觉无名把机架弄成铝合金纯属自作聪明,金属很容易摔弯变形。匿名也没有用金属的。
看着好看,实际不中用,无人机这么容易炸机的东西居然用金属做机臂,简直是作死,看似特立独行,标新立异,但是别人大众的方案是有道理的。还有你看无名那个机脚设计的是什么,压根不一样长,永远放不水平的,也是无语了。
7月8日,奋战了一个下午加一整个晚上。一个电调校准和ACfly应该从下午六点弄到晚上十一点最后我搬出我以前的电脑win7解决。真的各种。
7月9日,

上午飞ACfly都还正常
今天下午飞ACfly第一次出现射浆,第二次发现浆叶把一个电调的信号线打断了,也是无语了,不要再犯这种低级错误,两次无人机都翻过来了。不对,可能是因为前面一次炸机翻车倒过来,把线弄上去了。
7月12日,换了超声波模块,并且用买来的gh1.25转杜邦线的线接超声波和飞控,再去飞,今天上午和下午都很稳,b参数是之前设置的3.5

晚上我把ACfly拿到室内飞了下,发现风扰还是很严重,但是ACfly比无名好的一点就是不容易失控炸机,可以平稳降落,你想降落了赶紧打方向盘,这个遥控操作上感觉比无名好,无名你猛打降落可能触地失控,也就是危急时刻你就狠矛盾了,ACfly可能不会让你太矛盾,他遥控操作降落感觉还好,你觉得无人机跑偏了赶紧弄遥控器嘛,或者赶紧降落就好了。
7月13日

7月16日
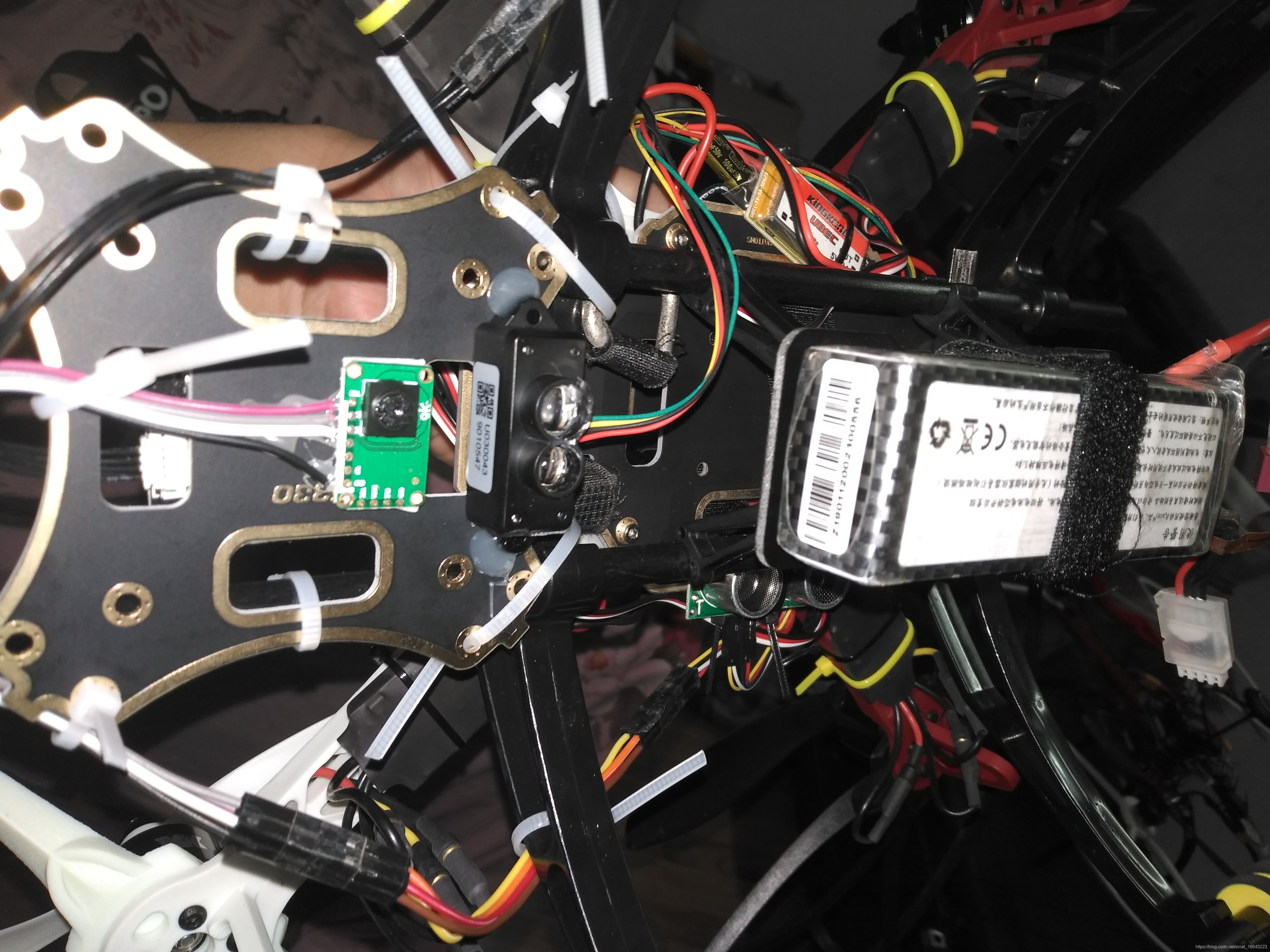
我把光流模块换成优象亲手给我焊的,而且装上激光测高也就是北醒的tfmini,其实是之前匿名上面的,匿名退给我的,我拿来用。

7月17日
加了GPS,还加了两根柱子,扩展起来方便多了。不然真的没地方加传感器了。

7月20日
现在具体的飞行日记写到ACfly调参记录这个博文里面了。

7月21日
今天去莲花湖边飞Pixhawk

依旧不能定点,只能定高飞。定点模式下不能起飞,定高模式下起飞后切到定点也没用,实际还是定高,可能因为没有GPS信号?
自稳模式叫着好听,实际就是定高都定不了,你要是自稳模式起飞,那个上下都不好控制,打油门容易忽然飞得很高,无名你去掉定高也是会专业,稍微打下油门就飞得比较高,但无名好歹还有光流定定点啊,自稳是水平,竖直方向都得去控制,哪里弄得过来,这怕是给穿越机的?
射浆,没想到,看到以后时刻注意拧,就算他们宣称是自锁浆,我感觉还是呵呵了,也得拧。
遥控器没电。
我真没想到大名鼎鼎的pixhawk这么不好弄?不合理啊,难道是我买到杂牌飞控?
你说这样还怎么基于Pixhawk做SLAM,自己飞都飞不成。
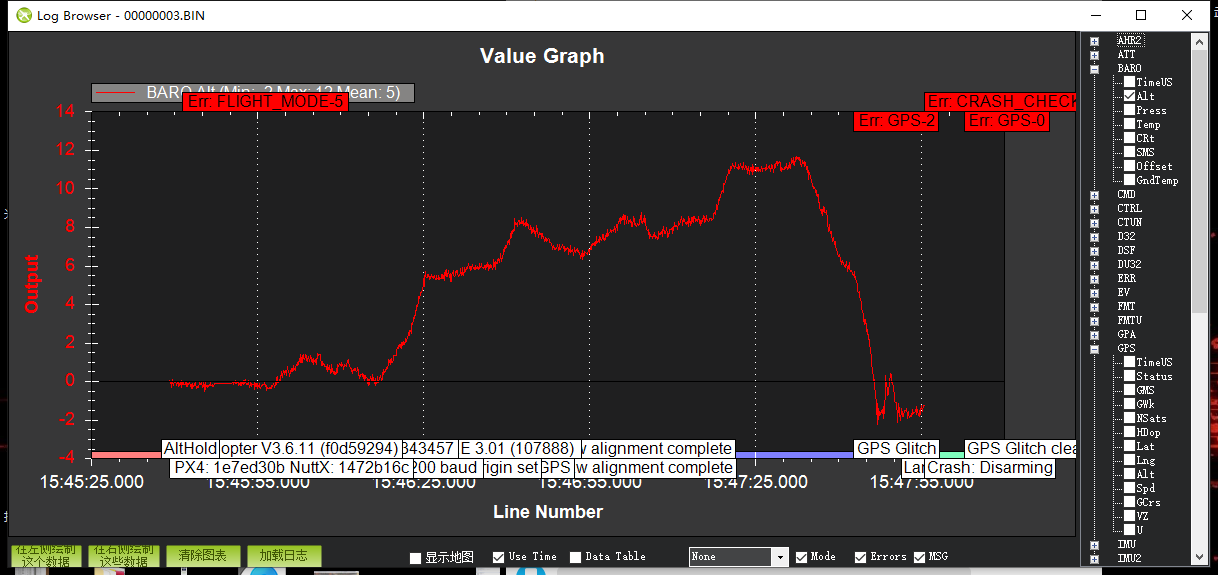
我准备把今天飞的Pixhawk的日志分析下,看看到底也没有接受到GPS信号。
看这个我的GPS似乎是有信号的
http://www.nufeichuiyun.com/?p=28
7月24日
换了断的GPS杆,换了保护罩,换了新浆

7月25日
没有视频记录,因为是我自己去了,来不及拍视频,本身机子飞得就不稳,得实时操控。
可以看日志
11是上午莲花湖边,单用GPS罗盘,12是上午回来改为只用内部罗盘在院子里飞,13,14是只用内部罗盘下午去莲花湖飞。

单靠外部罗盘摇得很厉害,可能是因为GPS那个杆子摇得很厉害。明显看到GPS杆晃动的幅度很大。
今天去莲花湖边试了就单个罗盘,包括单用GPS的罗盘和但用内置罗盘,都效果不行,而且日志都有各种报错,并没有因为说用单个罗盘就少报了某种错误,虽然在院子里时看起来似乎是没报EKF的错误,但是在湖边飞,这种错误依然有。定点模式依旧切不了。
空中飞得很不稳,右上那个电机似乎始终没力,反正很不稳。最后降落后也不关闭,遥控器强制关也没用,我手被打出血了。
我也懒得再弄回原本两个罗盘看是否飞得稳了,因为今天炸机也炸得浆不够了,我也对这个pixhawk2.4.8心灰意冷了。
我决定以后不买他们的杂牌飞控了。
似乎单个罗盘之后就没以前稳,当然只用内置罗盘稳一些,只是好像有个电机无力啥的,
不过我现在怀疑这个飞控就有问题
这个pixhawk用得怀疑人生。
我需要那种把浆卡死的电机 没错,我需要那种,现在这种电机达不到,它不是卡死的 330的那个XK电机我感觉挺好的
回来看日志发现还是报那些错,没有减少。
我是没劲折腾了 我宁愿换个飞控,真的很可能是硬件原因,如那个上交的人所说。
7月29日
换上了从权盛买的三百多的pixhawk,所有的接线还有设置和苍穹四轴的Pixhawk一样,这个不用担心,我现在再重新弄个Pixhawk,从头设置,速度已经非常快了,都不用看什么教程,反复弄了多次都已经熟记于心了。真的是反复弄反复弄反复弄。感觉反复还是有好处的。

感觉换个飞控稳多了,而且可以直接定点模式起飞。院子里还能绿灯快闪。不过后来实际看日志卫星也就几个十个左右。
今天还是阴天
后面降落可能因为降到地处遮挡了GPS,所以降落速度有些失控
我用的两个罗盘,没有出现EKF的报错。
是的,这个单定高就比较稳。
还有把电调和电机线绑紧,他们卡得不牢
让我重新对pixhawk充满了信心
没有到定点不怪它因为确实没有足够的GPS
苍穹给的pixhawk绝对有问题
就算是定高模式也比苍穹四轴稳多了,是的,基本不怎么飘,就算飘也只是很小地飘哪有苍穹四轴飘那么厉害
而且看它飞得挺稳,我还在院子里飞得比较高,整体操控起来还好。
还有我找到上次7月25日莲花湖边无人机降落后停不下来的原因了,因为你切降落模式了,我在权盛的Pixhawk上用降落模式也出现类似的情况,所以以后不要轻易使用降落模式。
权盛的Pixhawk ,绿灯慢闪的情况下,是不能切定点模式起飞,可以切定高模式起飞,绿灯快闪的情况下,可以直接定点模式起飞。苍穹四轴那个Pixhawk是不管绿灯怎么样,都不能定点模式起飞。当然权盛这也要注意的就是他们的绿灯快闪其实卫星数量可能也就十颗左右,不算很高。
我准备明天后天去莲花湖边飞一下,看看能不能实现真正的定点。
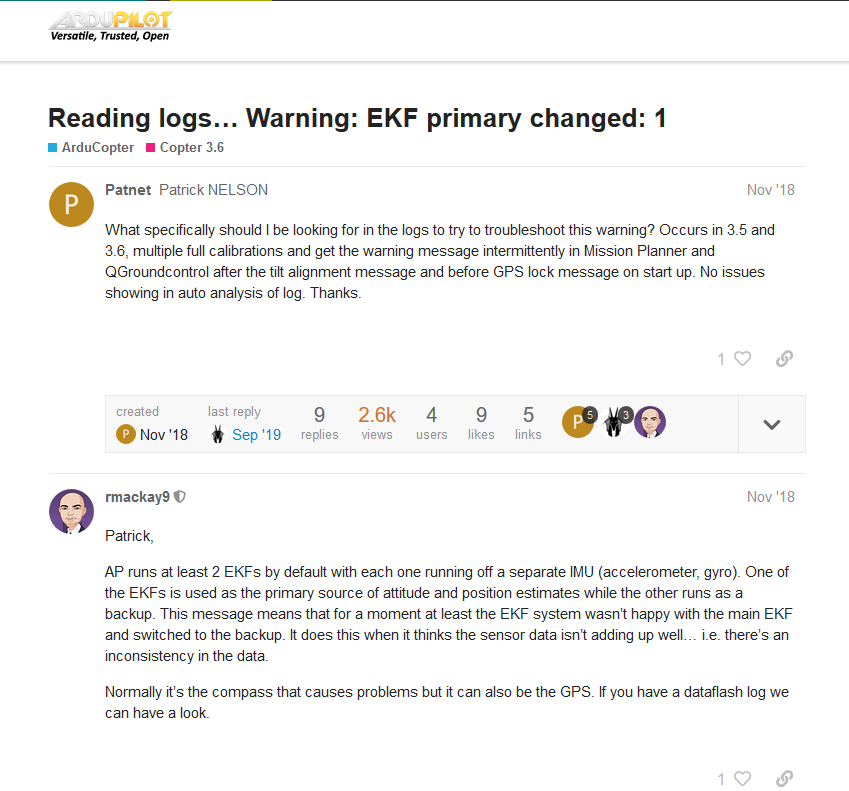
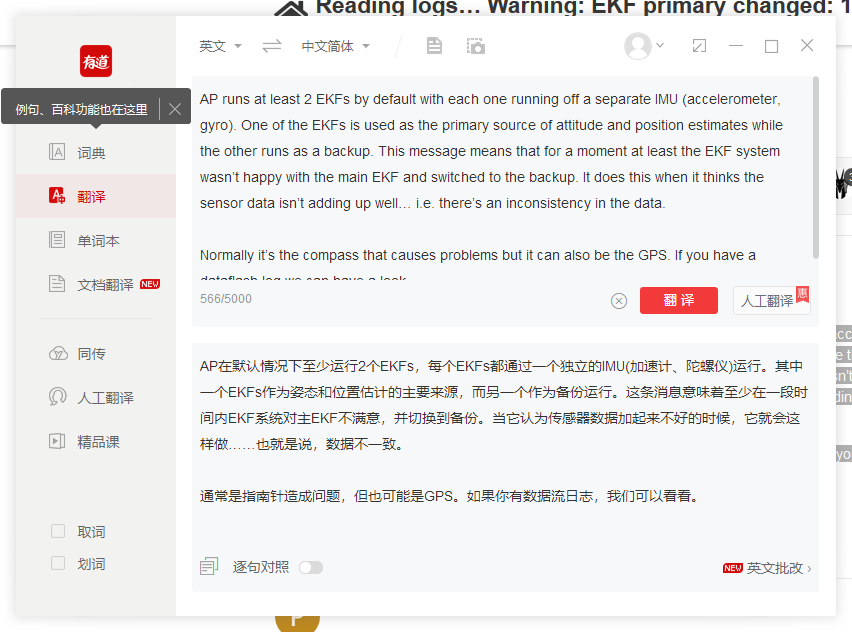
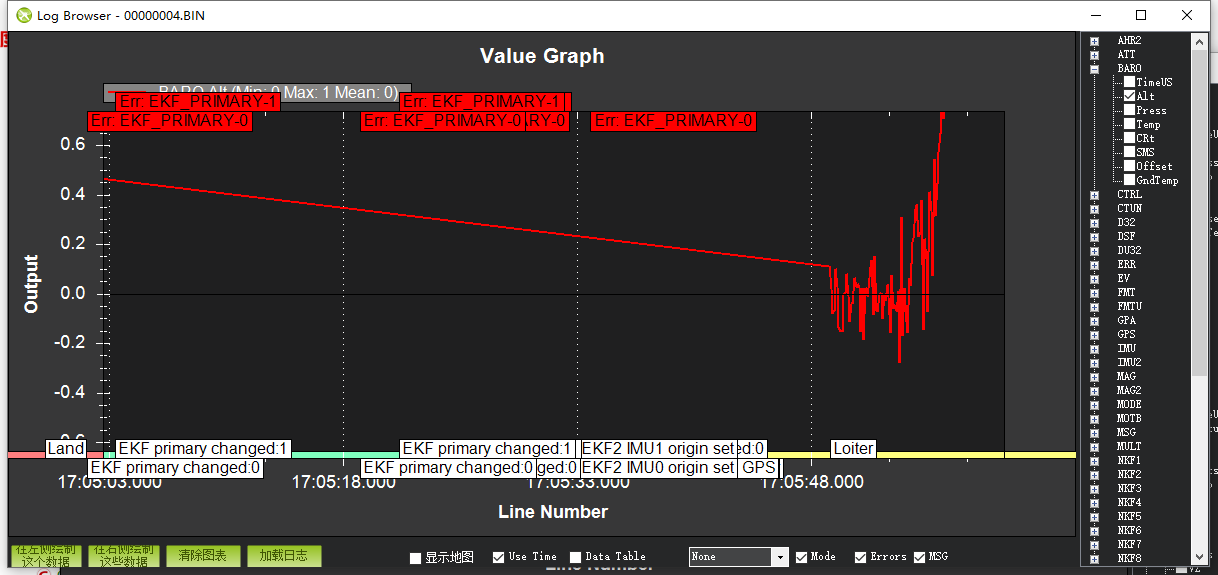
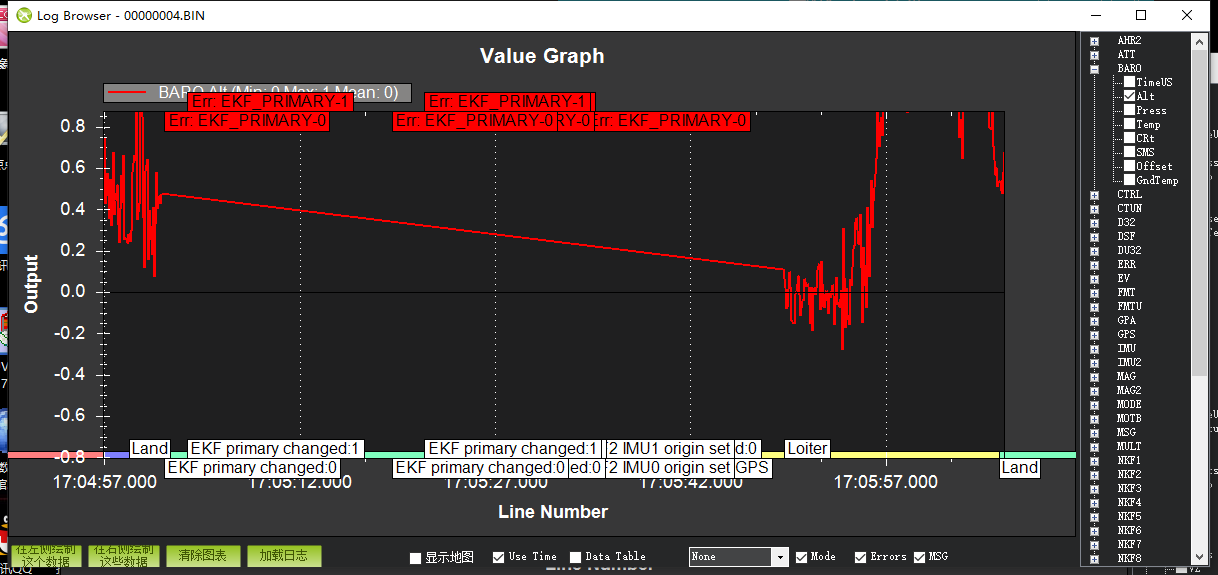
第二次下去飞出现了ekf primary changed 不过它的报错都不是在我飞行中出现的,是我落地后停下来出现的。
我在百度输入efk就有跳出这个我估计搜这个的人比较多,搜了下似乎就是两个EKF的切换,可能落地后GPS信号不好?
https://discuss.ardupilot.org/t/reading-logs-warning-ekf-primary-changed-1/35535
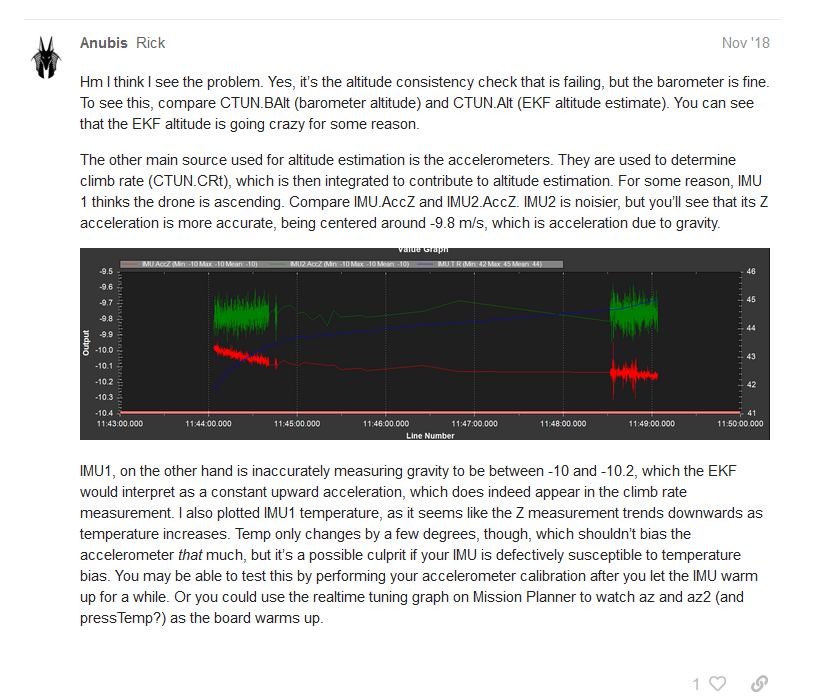
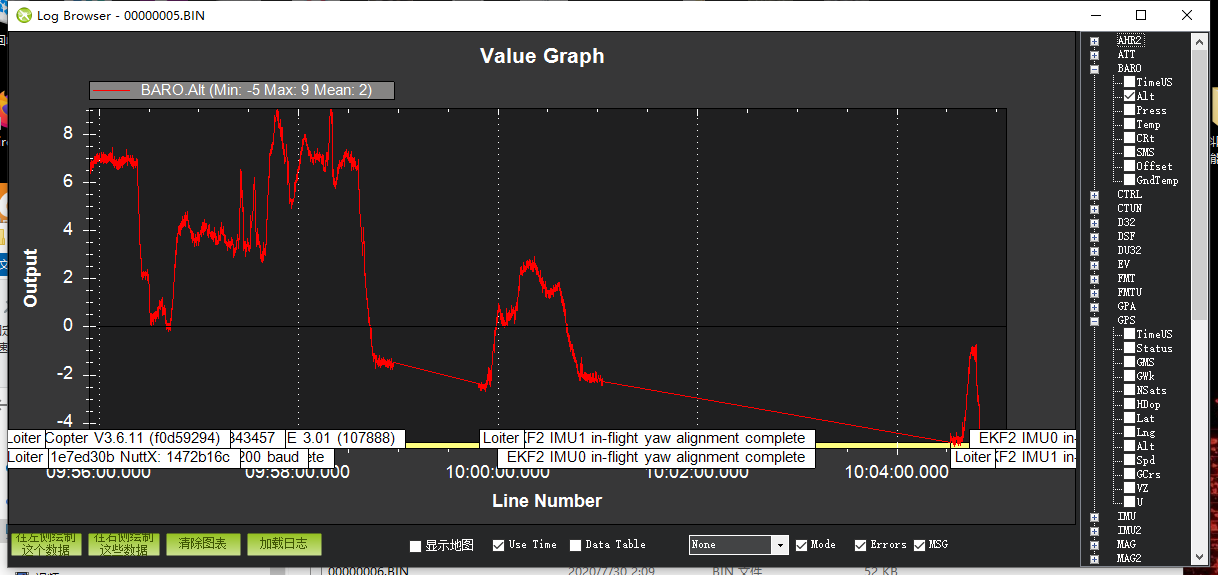
我想我看到问题了。是的,是高度一致性检查失败了,但气压计没问题。要看这个,请比较CTUN。BAlt(气压计高度)和CTUN。(EKF高度估计)。你可以看到EKF的高度因为某些原因变得疯狂。
另一个用于高度估计的主要来源是加速度计。它们被用来确定爬升率(ctan . crt),然后将爬升率整合到高度估计中。由于某种原因,IMU 1认为无人机正在上升。IMU进行比较。AccZ IMU2.AccZ。IMU2噪音更大,但你会看到它的Z加速度更准确,在-9.8米/秒的中心,这是由于重力加速度。
图像
的形象。png1698 13.8×474 KB
另一方面,IMU1不准确地测量了重力在-10到-10.2之间,EKF将其解释为一个恒定的向上加速度,这在爬升率测量中确实出现了。我还绘制了IMU1温度图,因为看起来Z值随着温度的升高呈下降趋势。尽管温度只变化了几度,加速度计不应该有那么大的偏差,但如果你的IMU对温度偏差有缺陷,它可能是一个罪魁祸首。在让IMU预热一段时间后,您可以通过执行加速计校准来测试这一点。或者你也可以使用任务规划器上的实时调谐图,在董事会升温时观看az和az2(以及pressTemp?)
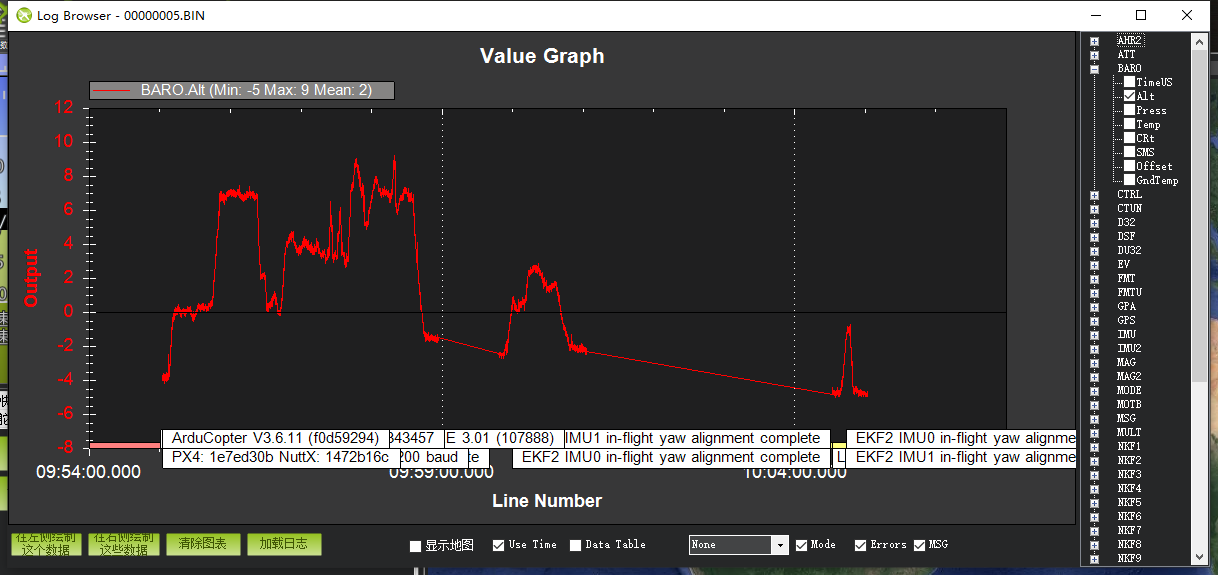
我有个惊喜的小发现就是我用loiter定点模式飞过。没错我真的飞过,估计是绿灯快闪的时候可以直接定点模式起飞那次。真的是难得啊,说明GPS信号足够的时候定点飞是没有问题的。
7月30日
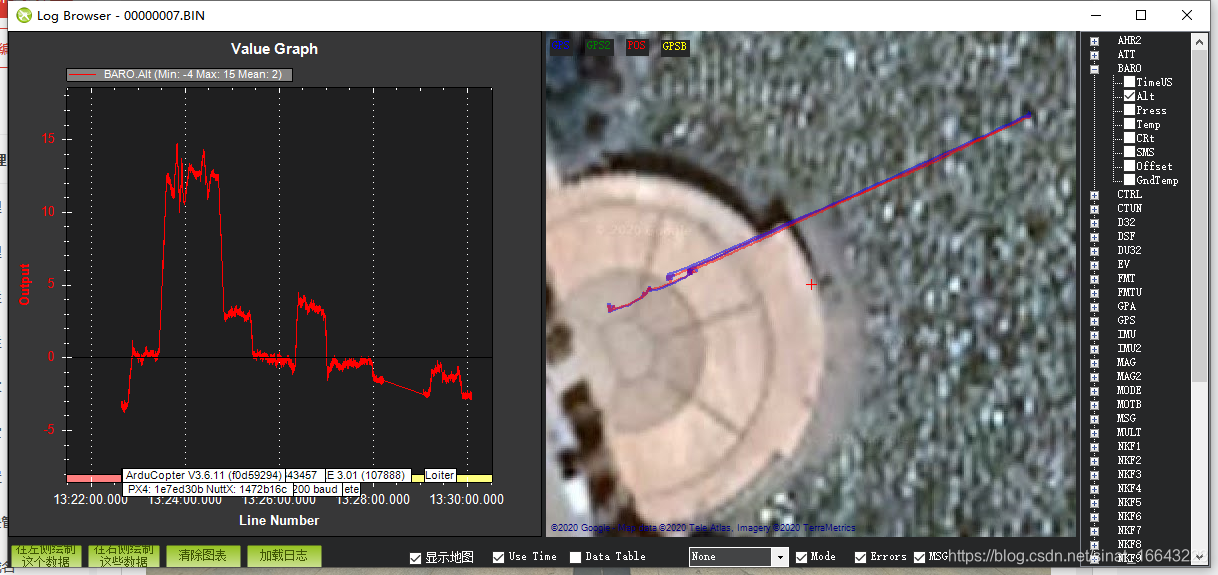
今天上午成功在莲花湖边实现pixhawk的GPS定点飞行,默认参数就飞得很稳。
也说明苍穹四轴那个pixhawk是真的有问题。
查看日志一个报错的都没有,看来只要GPS信号足够好就应该没什么报错,昨天的报错应该是因为GPS信号不好,而且都是在没有飞的时候报的错。
GPS卫星数量在十几二十颗左右,湖边。
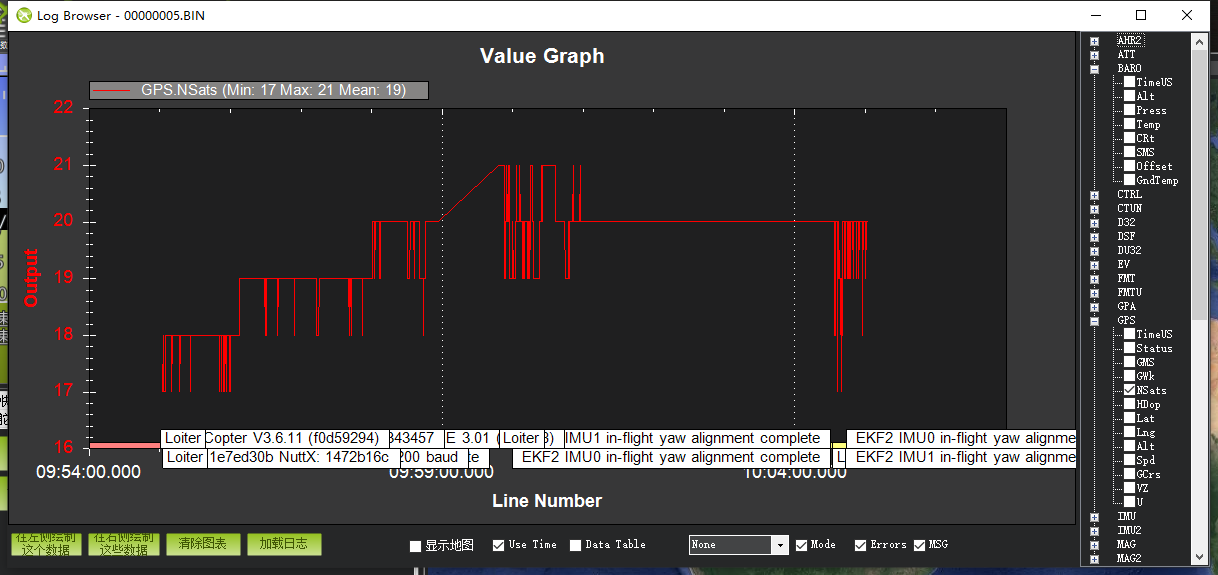
看GPS地图,我中途确实是有一段飞到湖上面去了。不过我好奇为什么会有蓝线和红线,而且这么吻合,我之前院子里飞没这么吻合。
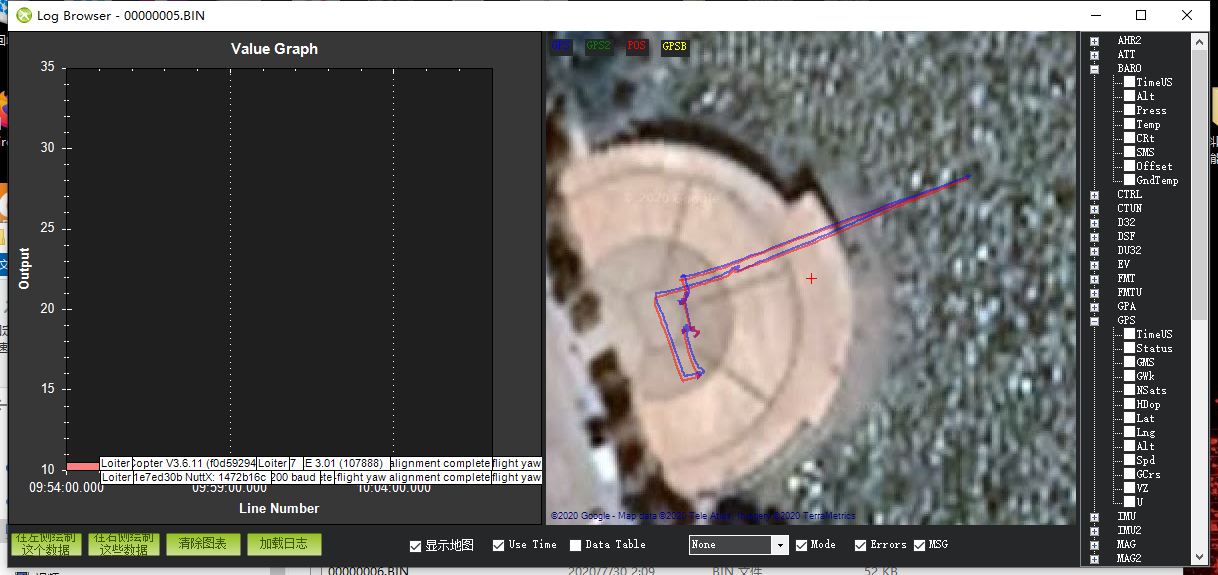
查看飞行模式是loiter,定点模式,这也是昨天实现定点模式飞行,今天实现真正的GPS定点飞行。


其实你对比苍穹四轴的Pixhawk第一次飞和权盛的pixhawk第一次飞,差距巨大,苍穹四轴第一次飞飘成什么样了,而且飘的速度还很大。让我之前以为Pixhawk这么烂,都大算放弃用pixhawk来做SLAM了,觉得还不如ACfly,确实之前那个苍穹四轴的pixhawk是我飞过的最难飞的Pixhawk。
看来有时候出问题确实可能就是pixhawk硬件出问题了,而不是软件。那个上交的人可能说的没错。
8月1日
给F450装了另一种脚架。

8月3日
今天再去莲花湖飞,是第二次在莲花湖边飞权盛的pixhawk,上次最后一次飞有点抖得现象没有了,可能是上次电机或者浆哪里松了什么的
今天天气非常不错。
总体感觉就是有风的话会有扰动。近地也不是那么稳。这种有点风就扰动,室内更不稳了
高空可能似乎稳些。
是不想要学会PX4自己调参
智能无人机课程里好像有教调参的。
低空没有ACfly那么稳
总体我感觉还好,应该可以拿来做双目定位。
我今天大概13天没飞ACfly了今天飞ACfly发现居然不那么稳了,降落时偏航角还会变,回来看日志发现激光定高中途没有输出了。
感觉最终可能是pixhawk可靠点,毕竟是这么多人弄的,也有社群支持,二次开发也方便。可能鲁棒性更强,个人开发的飞控,虽然他们给的视频看着都挺稳,非常稳,比如无名,ACfly,他们视频里看着真的非常稳,但那可能是在他们机架上,换成自己的机架可能就要打折扣,而且可能有些其他不知道的bug,比如无名的降落。。。pixhawk弄那么多应该有他们的道理的。可能个人的飞控刚开始上手快但是越往后可能越一般,pixhawk可能上手慢,但是越往后可能越喜欢。个人开发的飞控可能局部优化的很好如他们视频所拍的,但是整体可能还是不如pixhawk的。
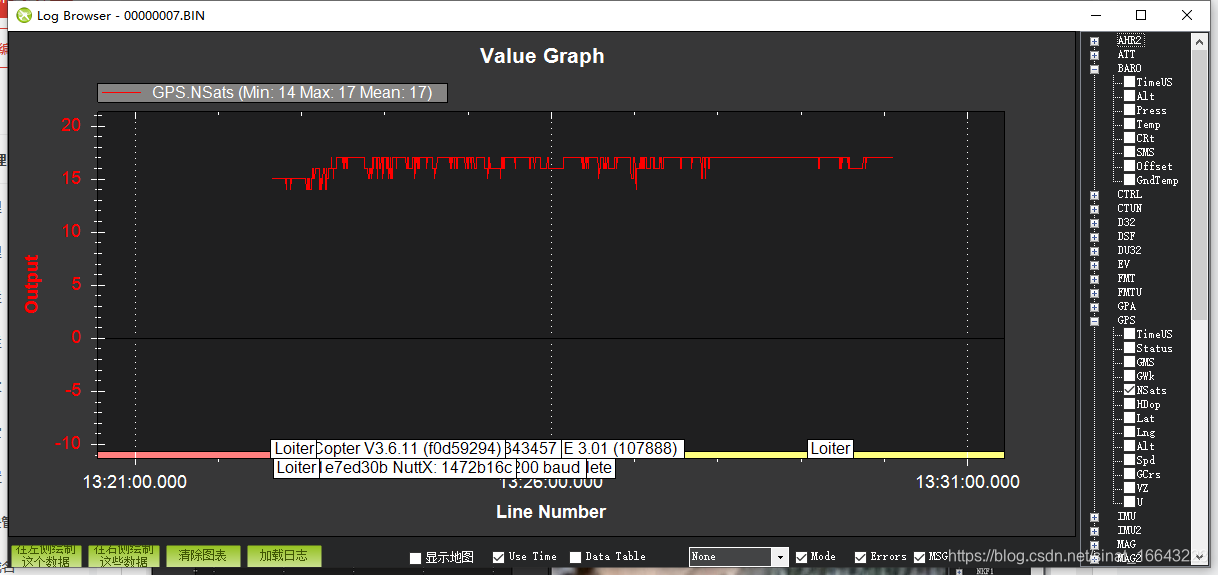
今天日志没有任何报错,而且模式是定点模式loiter 这种没有报错的感觉还是很好。
从一开始就是Loiter模式。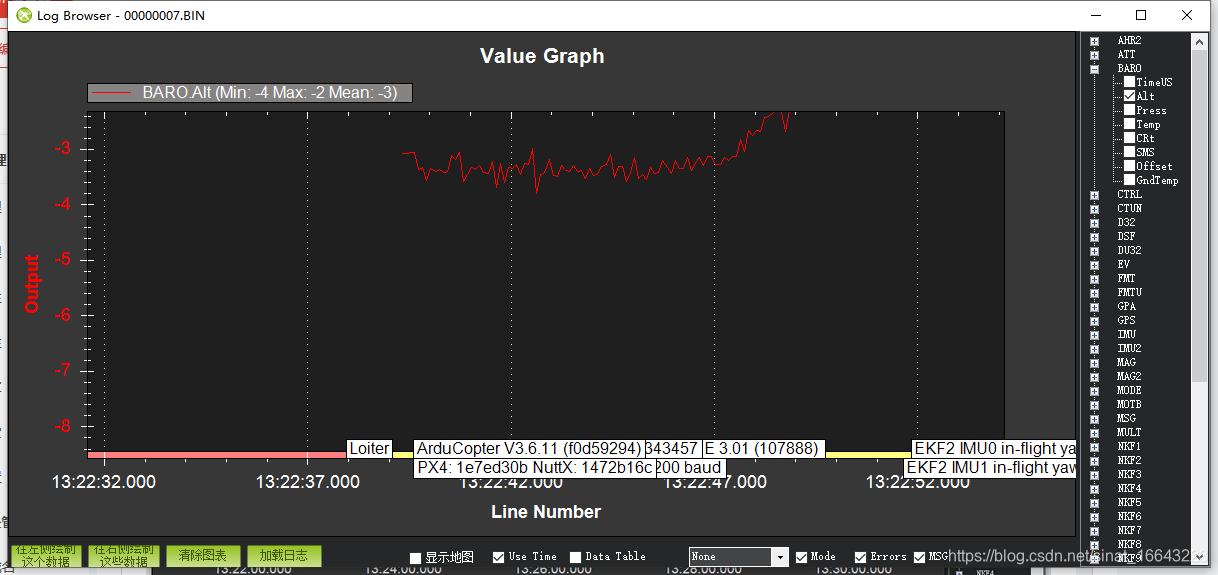
今天这么大晴天卫星信号居然只有17颗左右。




其他的我似乎放在ACfly调试记录里面,还有后面我开始弄APMT265树莓派无人机,这也没有写在这里面了,所以得去其他博文看。
2020.10.28
我放了一个多月的我的无人机,F450 树莓派 APM T265,刚刚开箱,而且也是刚刚发现还是倒着放了一个多月。



















 2239
2239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











