






转载自:https://mp.weixin.qq.com/s/shxmOtDOSVZn_eQKgs8LBw
小觅智能 |MSCKF 学习笔记
知乎觅 MYNTAI小觅智能 2019-10-31
VIO 目前实现比较好的有 Vins-mono , OKVIS , MSCKF ,前两个是基于非线性优化的方案而且框架比较相似,小觅也做过详细介绍啦~这次着重介绍基于滤波优化的方案的 MSCKF ,MSCKF 是由 Mourikis 于 2007 年提出,全称是 Multi-State Constraint Kalman Filter,其核心思路在于利用帧间的几何多视约束,并且不需要保存 3D 点的状态信息。遗憾的是目前没有开源,不过宾夕法尼亚的 Kumar 实验室在 2018 年有一个相似的工作,目前已经开源在 Github 上:github.com/KumarRobotic
MSCKF 的整体系统流程:
-
IMU 预测
-
视觉跟踪
-
视觉增广
-
视觉更新—选老点或者看不见的点
-
视觉更新—边缘化
-
剔除老帧
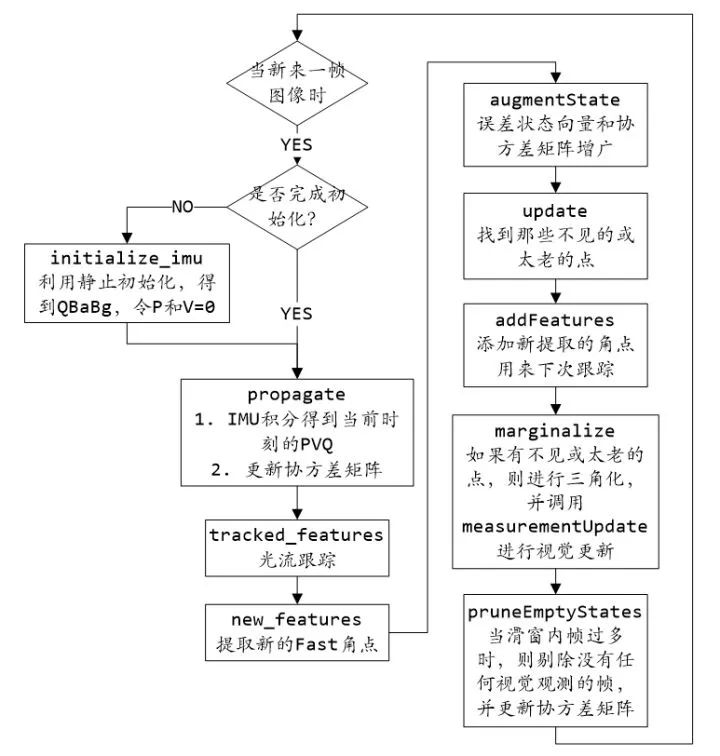
图 | 出自深蓝学院公开课
可以看出 MSCKF 侧重的是快速的姿态跟踪,而没有全局地图的优化。
MSCKF 优缺点:
优点:
计算复杂度低,精度也还不错
缺点:
后端是卡尔曼滤波,无法用到全局的信息进行全局的优化,没有回环检测
小觅双目摄像头跑 MSCKF 实测:
推荐使用 Kalibr 标定哦,精确的标定很重要, 双目和 IMU 在硬件级别的同步,是效果好的关键~















 4711
4711











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









