D435i部分话题内容整理(开发参考)
跑vins-fusion需要: D435i双目灰度图像话题1 /camera/infra1/image_rect_raw D435i双目灰度图像话题2 /camera/infra2/image_rect_raw D435i IMU话题 /camera/imu
跑ego-planner需要: D435i深度图像话题 /camera/depth/image_rect_raw
| | | |
|---|
| D435i深度图像话题 /camera/depth/image_rect_raw | 默认发布频率:30hz | sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html |
| D435i双目灰度图像话题1(左边摄像头) /camera/infra1/image_rect_raw | 默认发布频率:30hz | sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html |
| D435i双目灰度图像话题2(右边摄像头) /camera/infra2/image_rect_raw | 默认发布频率:30hz | sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html |
| D435i RGB图像话题 /camera/color/image_raw | 默认发布频率:30hz | sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html |
| D435i 深度对齐RGB图像话题(依旧是深度图像话题) /camera/aligned_depth_to_color/image_raw | 默认发布频率:30hz | sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html |
| D435i IMU话题 /camera/imu | 默认发布频率:400hz | sensors_msgs/Imu.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Imu.html 或者 http://docs.ros.org/en/melodic/api/sensor_msgs/html/msg/Imu.html |
备注:实际使用时,可能需要更改以上话题发布频率
| | |
|---|
| sensor_msgs/Image.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Image.html | 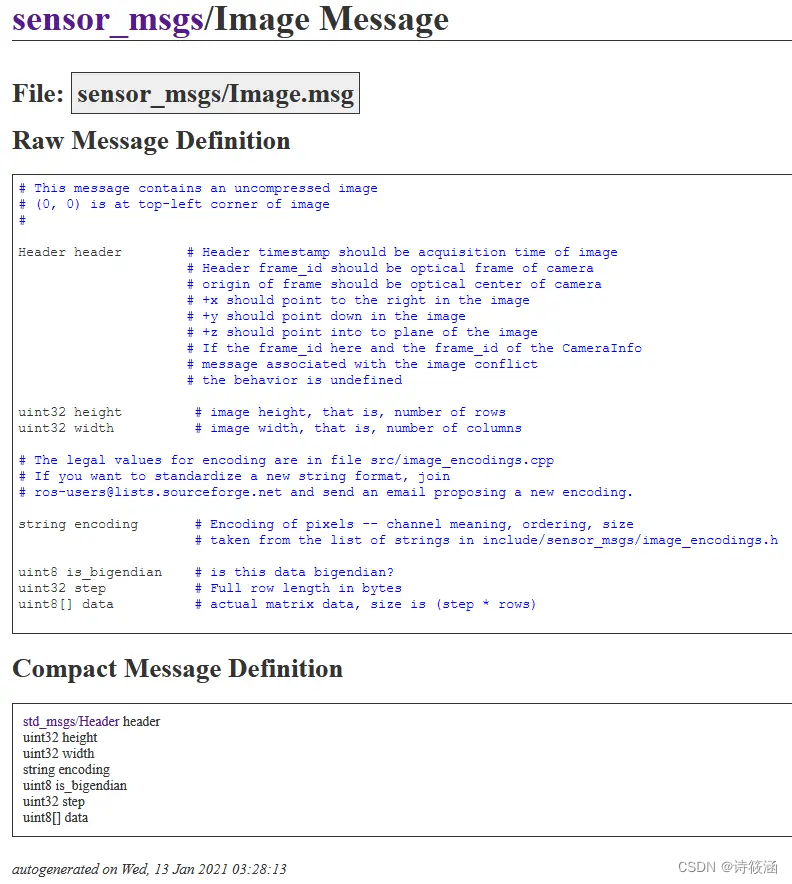 |
| | |
| sensors_msgs/Imu.msg | http://docs.ros.org/en/api/sensor_msgs/html/msg/Imu.html | 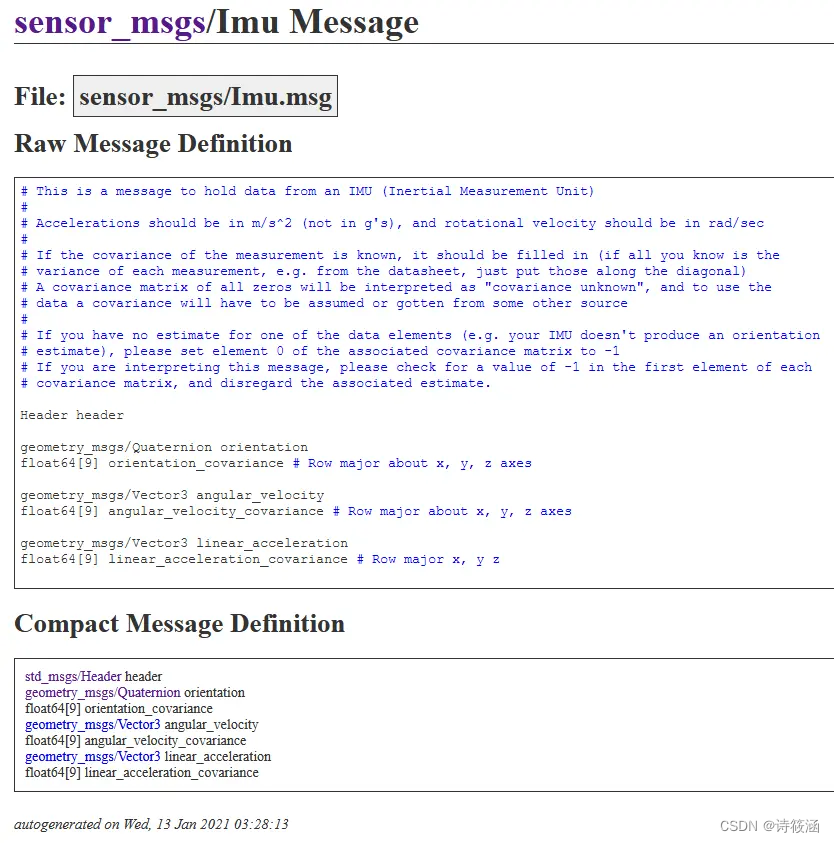 |
| | |
下面是实际每种话题内容里面每项对应的值及含义
| 话题名称:/camera/depth/image_rect_raw | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_depth_optical_frame | 坐标系 |
| uint32 height | 480 | 图像的纵向分辨率,即图像包含多少行的像素点 |
| uint32 width | 640 | 图像的横向分辨率,即图像包含多少列的像素点 |
| string encoding | 16UC1 | 图像的编码格式,不涉及图像压缩编码。 |
| uint8 is_bigendian | 0 | 图像数据的大小端存储模式。大小端应该是对比如每个像素的十六位而言的。 |
| uint32 step | 1280 | 一行图像数据的字节数量,作为数据的步长参数 |
| uint8[] data | | 存储图像数据的数组,大小为step X height字节 |
| 话题名称:/camera/infra1/image_rect_raw | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_infra1_optical_frame | 坐标系 |
| uint32 height | 480 | 图像的纵向分辨率,即图像包含多少行的像素点 |
| uint32 width | 640 | 图像的横向分辨率,即图像包含多少列的像素点 |
| string encoding | mono8 | 图像的编码格式,不涉及图像压缩编码。 |
| uint8 is_bigendian | 0 | 图像数据的大小端存储模式。 |
| uint32 step | 640 | 一行图像数据的字节数量,作为数据的步长参数 |
| uint8[] data | | 存储图像数据的数组,大小为step X height字节 |
| 话题名称:/camera/infra2/image_rect_raw | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_infra2_optical_frame | 坐标系 |
| uint32 height | 480 | 图像的纵向分辨率,即图像包含多少行的像素点 |
| uint32 width | 640 | 图像的横向分辨率,即图像包含多少列的像素点 |
| string encoding | mono8 | 图像的编码格式,不涉及图像压缩编码。 |
| uint8 is_bigendian | 0 | 图像数据的大小端存储模式。 |
| uint32 step | 640 | 一行图像数据的字节数量,作为数据的步长参数 |
| uint8[] data | | 存储图像数据的数组,大小为step X height字节 |
| 话题名称:/camera/color/image_raw | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_color_optical_frame | 坐标系 |
| uint32 height | 480 | 图像的纵向分辨率,即图像包含多少行的像素点 |
| uint32 width | 640 | 图像的横向分辨率,即图像包含多少列的像素点 |
| string encoding | rgb8 | 图像的编码格式,不涉及图像压缩编码。 |
| uint8 is_bigendian | 0 | 图像数据的大小端存储模式。 |
| uint32 step | 1920 | 一行图像数据的字节数量,作为数据的步长参数 |
| uint8[] data | | 存储图像数据的数组,大小为step X height字节 |
| 话题名称:/camera/aligned_depth_to_color/image_raw | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_color_optical_frame | 坐标系 |
| uint32 height | 480 | 图像的纵向分辨率,即图像包含多少行的像素点 |
| uint32 width | 640 | 图像的横向分辨率,即图像包含多少列的像素点 |
| string encoding | 16UC1 | 图像的编码格式,不涉及图像压缩编码。 |
| uint8 is_bigendian | 0 | 图像数据的大小端存储模式。 |
| uint32 step | 1280 | 一行图像数据的字节数量,作为数据的步长参数 |
| uint8[] data | | 存储图像数据的数组,大小为step X height字节 |
| 话题名称:/camera/imu | | |
|---|
| uint32 Header/seq | | 序号,自加一 |
| time Header/stamp | | 时间戳 |
| string Header/frame_id | camera_imu_optical_frame | 坐标系 |
| geometry_msgs/Quaternion orientation | | 姿态四元数 |
| float64[9] orientation_covariance | | 姿态协方差 |
| geometry_msgs/Vector3 angular_velocity | | 角速度 |
| float64[9] angular_velocity_covariance | | 角速度协方差 |
| geometry_msgs/Vector3 linear_acceleration | | 线加速度 |
| float64[9] linear_acceleration_covariance | | 线加速度协方差 |
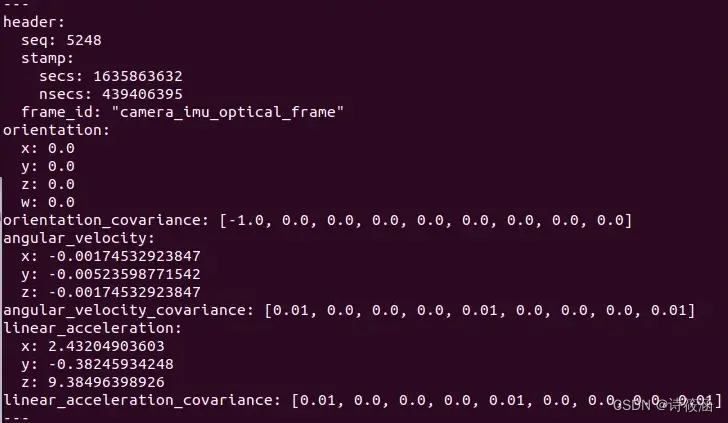
备注:orientation是由linear_acceleration和angular_velocity计算而得,但并不是所有IMU设备都直接提供orientation,如果没有提供,将orientation各项置为0,orientation_covariance各项置为-1.这里协方差表示各个数据的误差,一般由器件厂商给出。
实际D435i的 /camera/imu话题打印截图


























 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











