









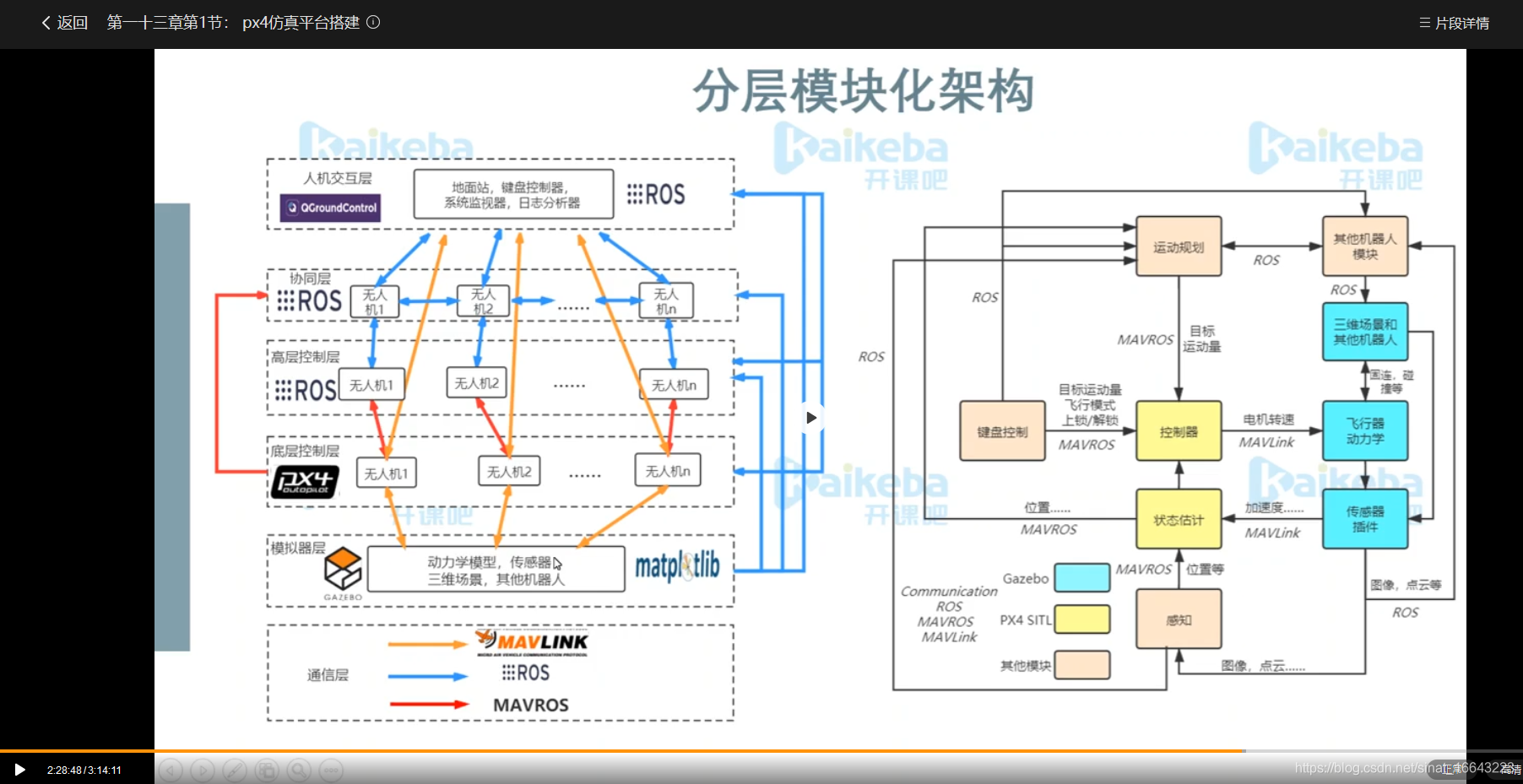
XTDrone的架构
这个是中文的,相比于英文的好看些。
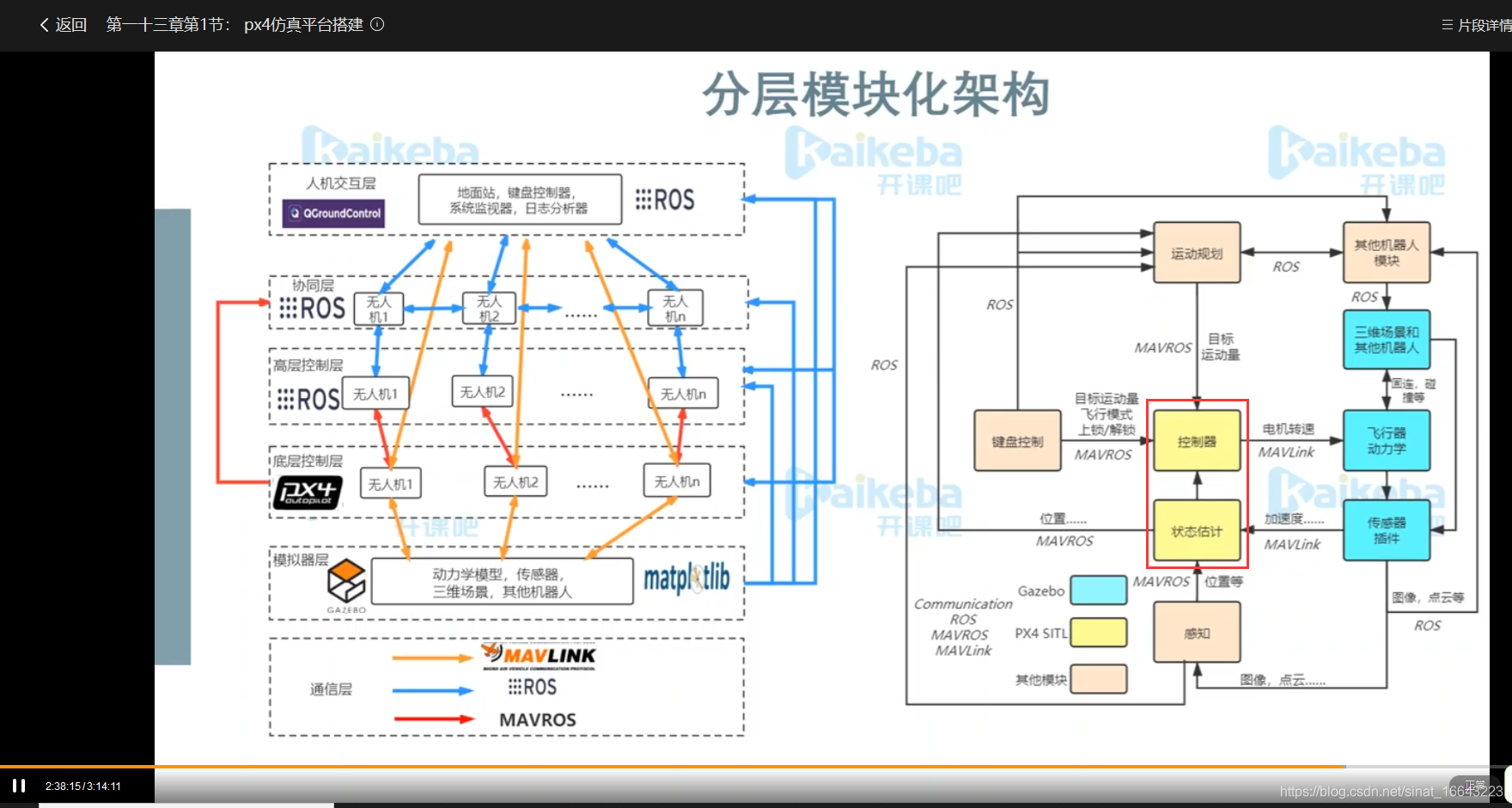
下面左边的图,可以看到,黄色部分相当于PX4嘛,箭头指向黄色部分的都是通过MAVROS传送目标运动量,加速度,位置等等这些。同时ROS也通过MAVROS中获取飞控内部的位置信息,就状态估计那里有个箭头往外指的,
我觉得本质可能是和普罗米修斯差不多的。
XTDrone的gitee上也有这个图
https://gitee.com/robin_shaun/XTDrone
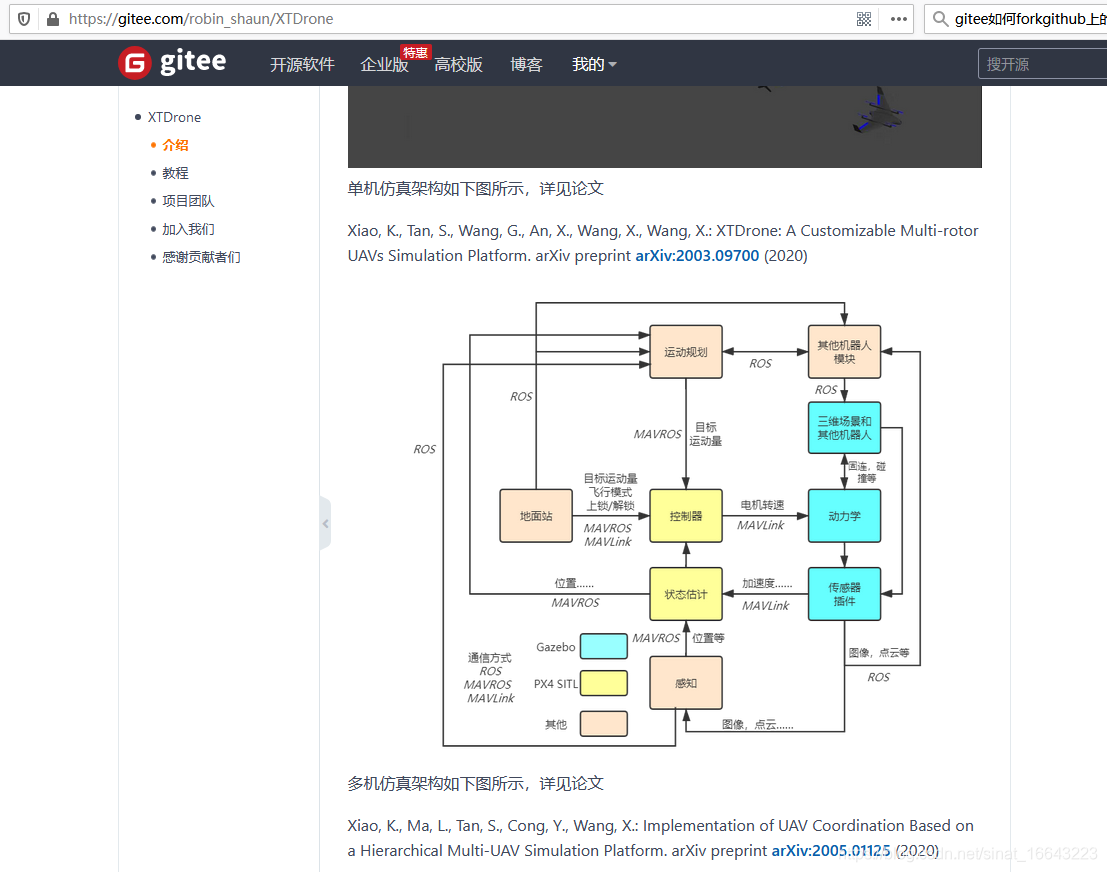
从事不同算法的开发者都能很好地借助于这个平台进行算法开发。这种解耦式的结构设计。
他这就很好的教你怎么借助于这个平台进行算法开发,你自己写去替换其中一个模块。弄SLAM的替换掉SLAM模块,弄运动规划的替换掉规划模块。


















 8898
8898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











