









转载自:https://mp.weixin.qq.com/s/VHaqsfNhl9yStMX--Gtx6g
无人机核心技术之运动规划
奕木 怒飞垂云 1周前
近年来无人机已广泛落地应用在农业、军工甚至渗透到了人们的日常生活中。

(无人机作业.来源于网络)
随着无人机与移动机器人产品广泛的落地应用、市场规模不断扩大,机器人公司对移动机器人方向人才的需求不断扩大。而作为移动机器人核心技术之一的运动规划(motion plannning)方向,人才更是紧缺!目前就业市场不仅是移动机器人、无人机,无人驾驶对运动规划需求量也很大,较计算机视觉领域,岗位竞争力也较小。

相较于国外,我国AI&Robotic领域的教育并不完善,目前国内资料也是少之又少,更是鲜有系统课程,伙伴们只能依靠知乎、博客、外网Paper进行摸索式探索......由于缺少系统的运动规划学习资料和实践经验,在做项目遇到各种问题时难以解决,做出来的东西也并不理想。
基于此,深蓝学院特邀浙江大学特聘副研究员高飞、港中文博士王超群、朱德龙以及新加坡国立大学博士赖叔朋老师,共同打磨出Motion Planning for Mobile Robots 课程。
课程系统,应用性强,通过讲师细致的讲解,能让基础薄弱的同学快速进入运动规划的研究领域,节省大量看文献的时间,高效夯实基础。在系统学习以及实际编写代码中,更能加深对算法的理解,对实际的工作有很大促进作用。
讲师简介
高 飞
浙江大学特聘副研究员
Tenure - Track 助理教授
研究兴趣包括空中无人机、自主导航、运动规划、视觉定位等。2019年8月于香港科技大学机器人研究所获得博士学位,博士期间,共发表论文21篇,其中第一/通讯作者论文14篇,包括机器人领域顶级会议 ICRA / IROS / ISRR(8x);顶级期刊 JFR(2x), TRO(1x), RA-L(2x),曾获得 IEEE SSRR 2016 最佳论文奖、香港科技大学工学院2018最佳博士生奖,国际空中机器人大赛(IARC)第一名荣誉。
课程大纲
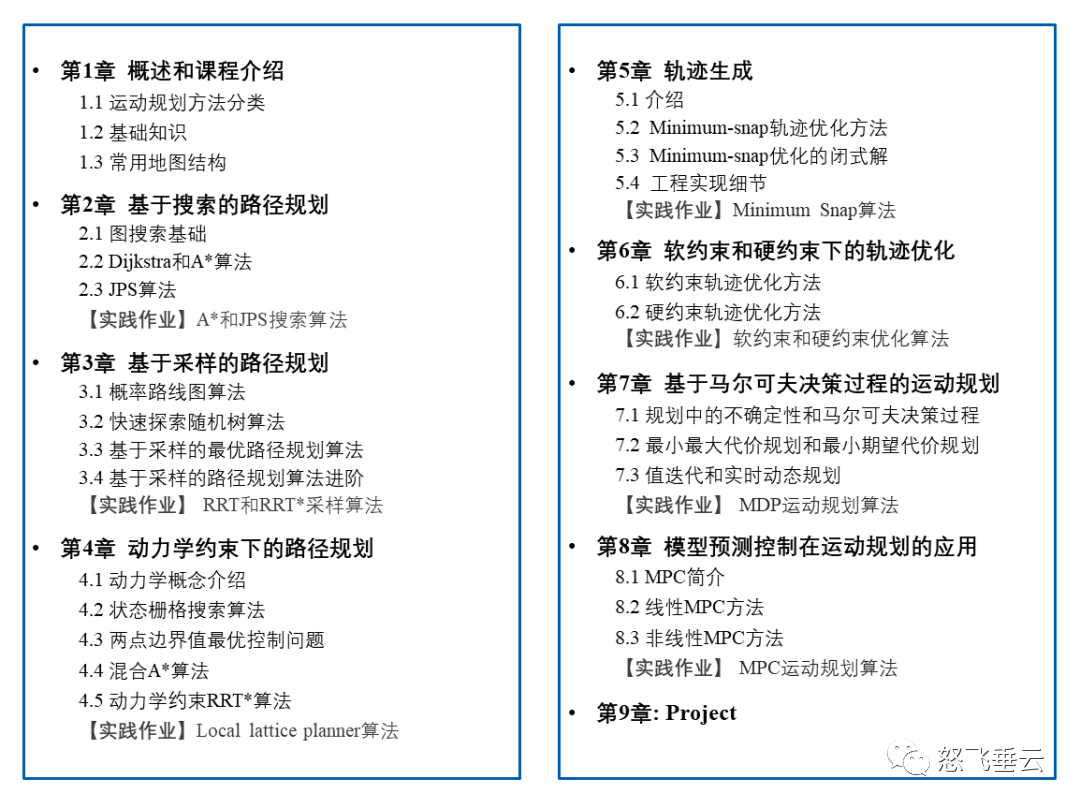
(点击查看大图)
实践项目
本门课程采用理论与实践相结合的教学方式,通过8个实践项目,让大家将课上所学知识,即学即用,通过亲自动手实践达到灵活掌握,融会贯通的效果。

(点击查看大图)
学后收获
1. 学习在复杂环境下让机器人自主高效地寻找路径,并生成机器人实际可以运动的安全轨迹和控制指令的方法;
2. 机器人处于不同场景时,熟悉采用哪种Planning方法;
3. 具备实现任意主流Planning算法,并部署在机器人上的能力,告别无脑调包;
4. 具备在企业从事相关领域研发的能力,掌握冲击机器人顶会的一些方法。
还能收获什么
1. 优质的学习圈子
伙伴们大多是来自985、211及海外院校硕博,在这里大家一起学习、进行讨论与研究。独一无二的优质圈子将是你未来学习与就业的宝贵资源。

(学员院校展示)
2. 企业认可的证书
学完课程后将有机会收获优秀学员证书、毕业证书,为你的简历加分添彩。















 1578
1578











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









