






自己尝试进行SVO2.0的安装
我首先参考这个教程 SVO2安装,编译和运行q_svo2运行-CSDN博客
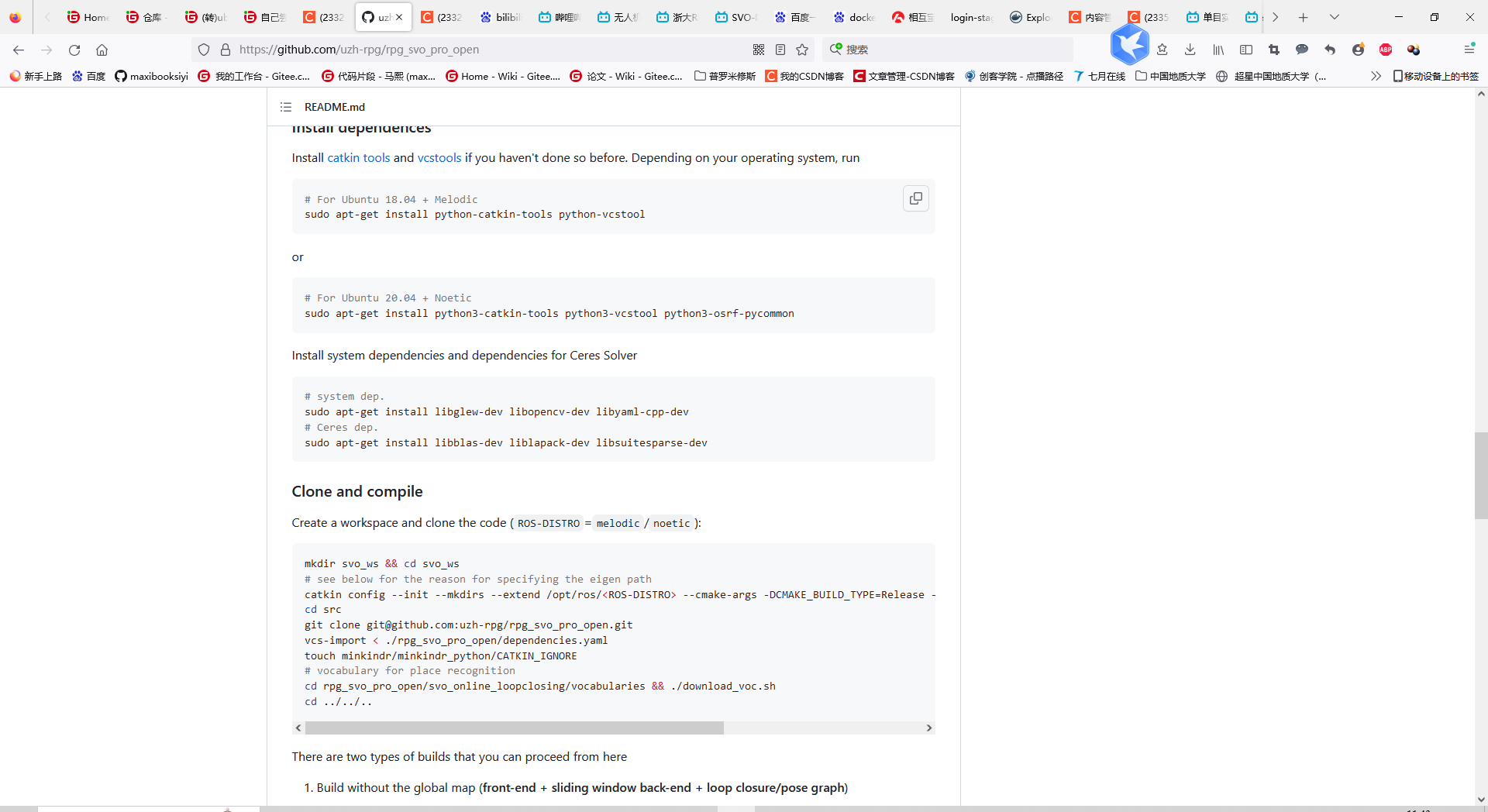
sudo apt-get install python-catkin-tools python-vcstool sudo apt-get install libglew-dev libopencv-dev libyaml-cpp-dev sudo apt-get install libblas-dev liblapack-dev libsuitesparse-dev
我发现这就是SVO2.0官方给的部署步骤
ubuntu1804搭建svo2.0环境并跑euroc数据集
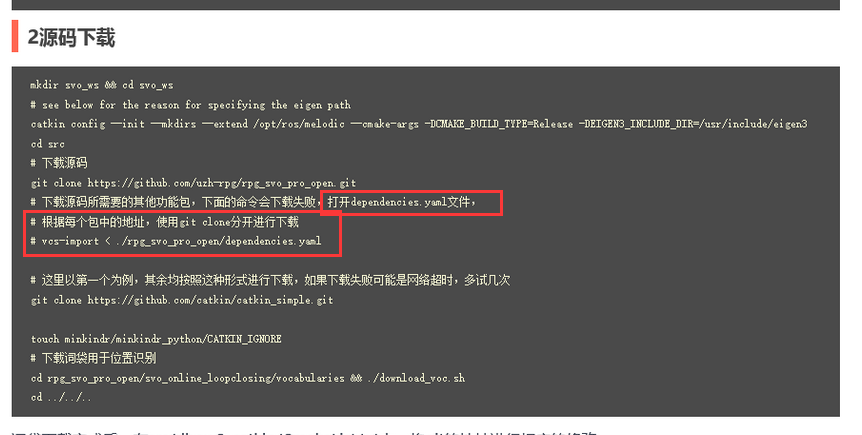
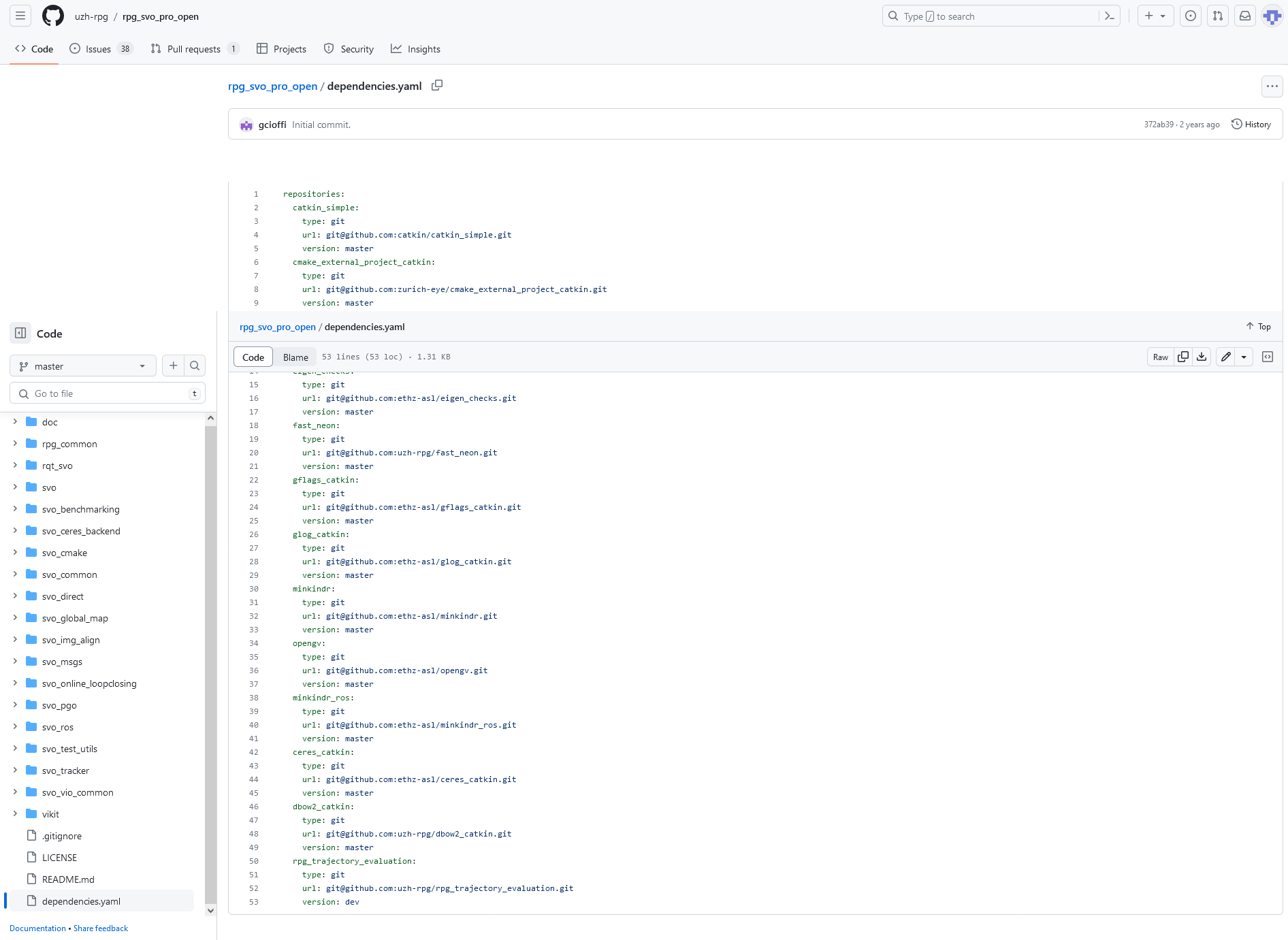
他们说的其实就是指这个文件,现在知道他们所说的改是改什么了
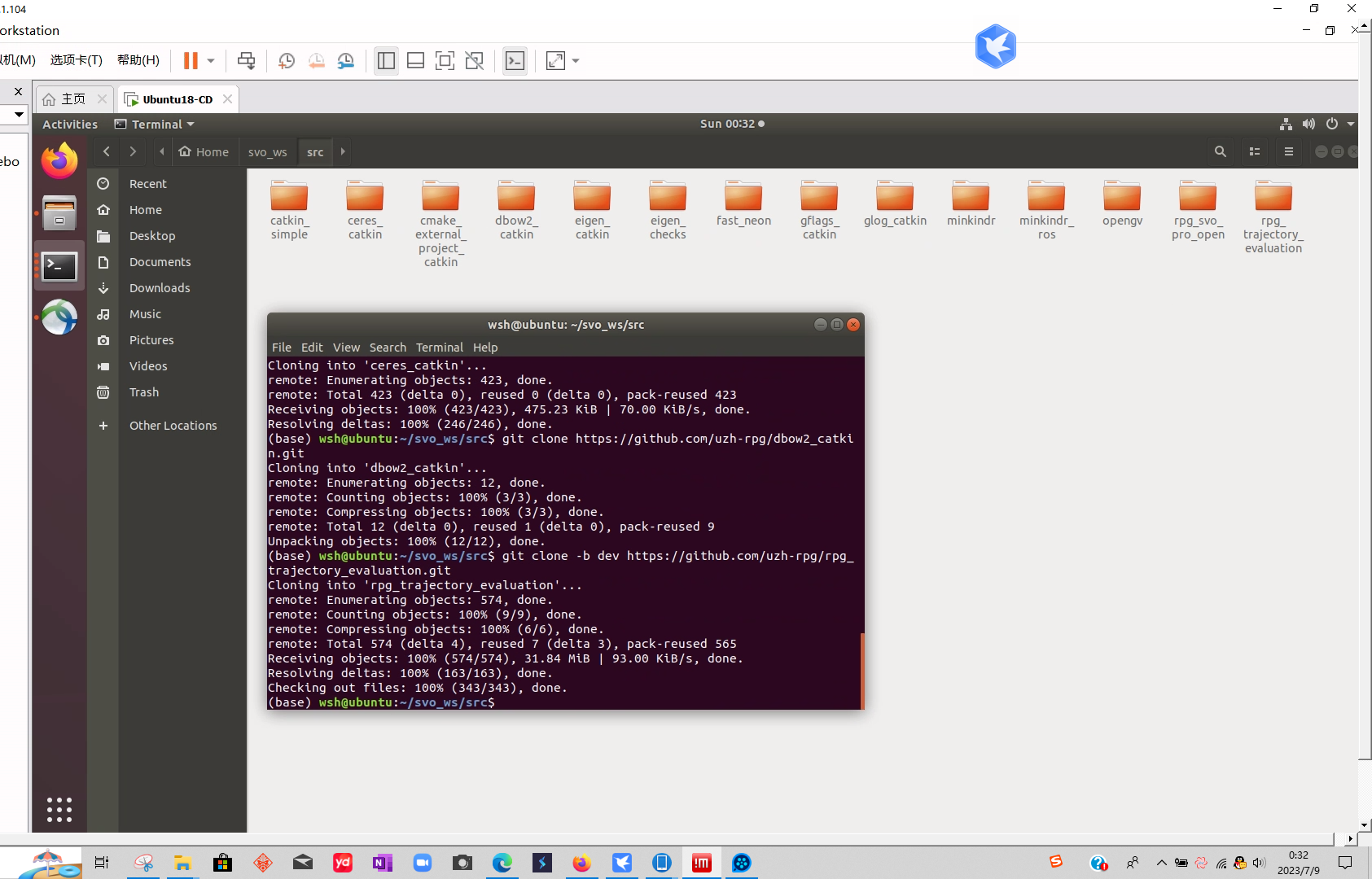
注意这些依赖库和SVO是平级关系,都放在src文件夹下 【SLAM】SVO2.0编译运行和论文代码解读_svo2 slam-CSDN博客


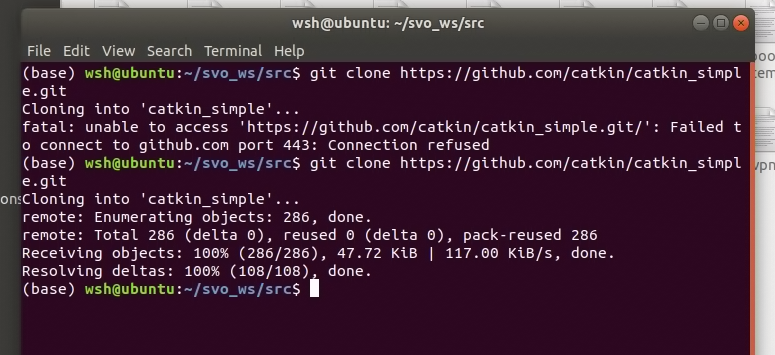
看yaml文件里面第一个要下载的 还真有个catkin/catkin_simple的仓库 https://github.com/catkin/catkin_simple
用xiyou把ubuntu端的V 配好,现在git clone OK了
这样我就很快把yaml文件里面要下的仓库都下完了
然后安装官方文档以及其他人的教程,再运行一个这个 touch minkindr/minkindr_python/CATKIN_IGNORE 虽然我也不知道做什么用的


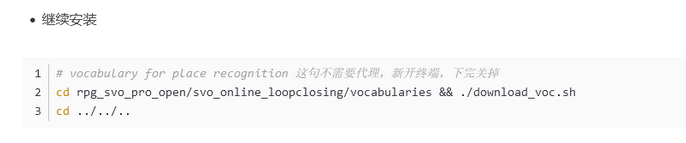
再接着是这步下载词袋,也是官方教程里的步骤,我看别人挺顺利的, SVO2.0 安装编译_svo安装-CSDN博客
GitHub - uzh-rpg/rpg_svo_pro_open

这个现在也下完了
接着我看有两篇博客都说到了这个 【SLAM】SVO2.0编译运行和论文代码解读_svo2 slam-CSDN博客

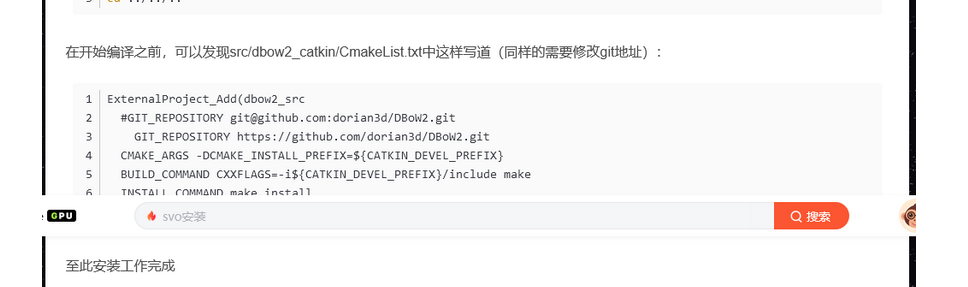
也就是这个文件
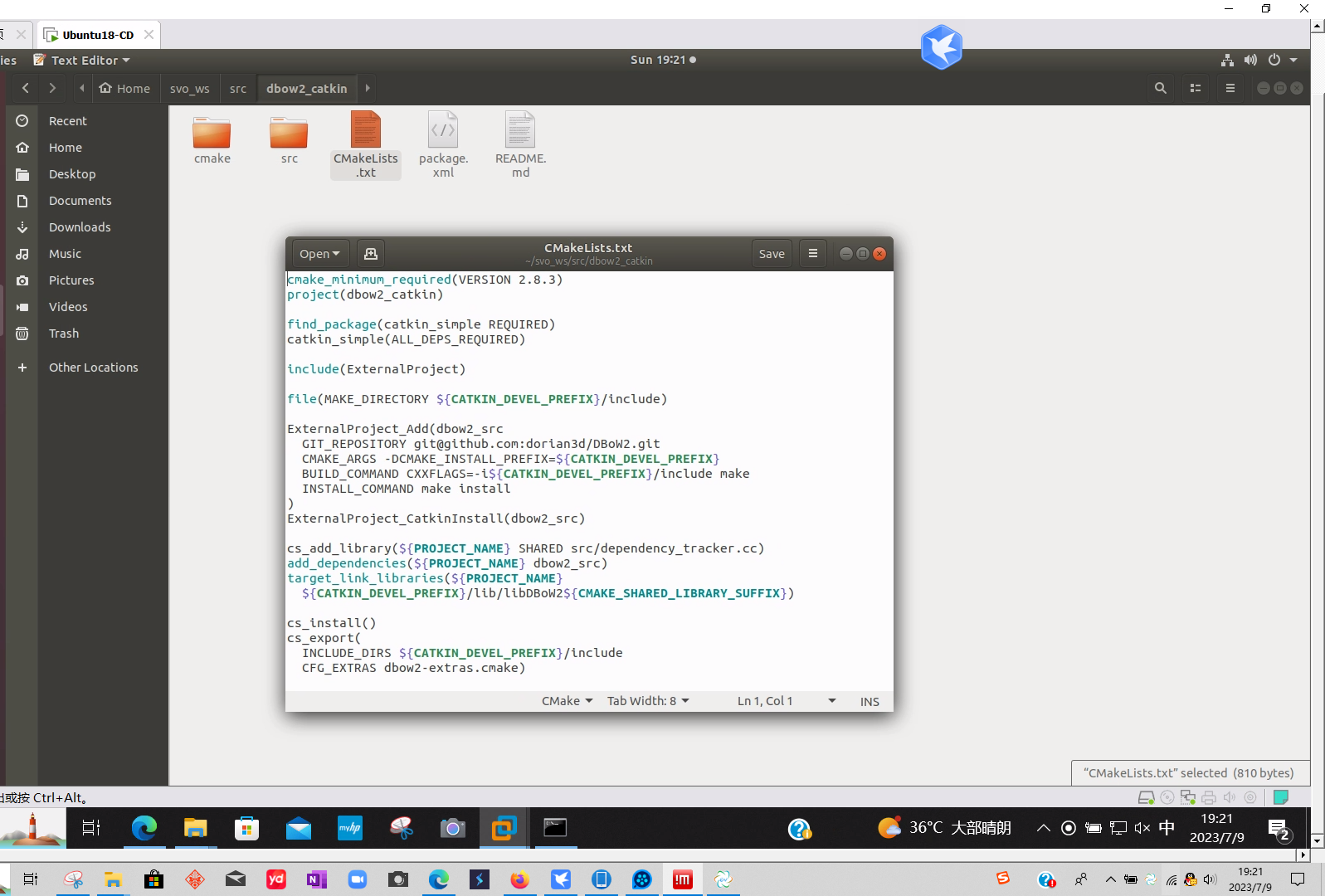
但是我感觉我现在连了xi you 应该不怕这个吧。还是说下的时候需要密钥?
我发觉我现在运行这个命令是可以下载成的。那我暂时先不改看看。
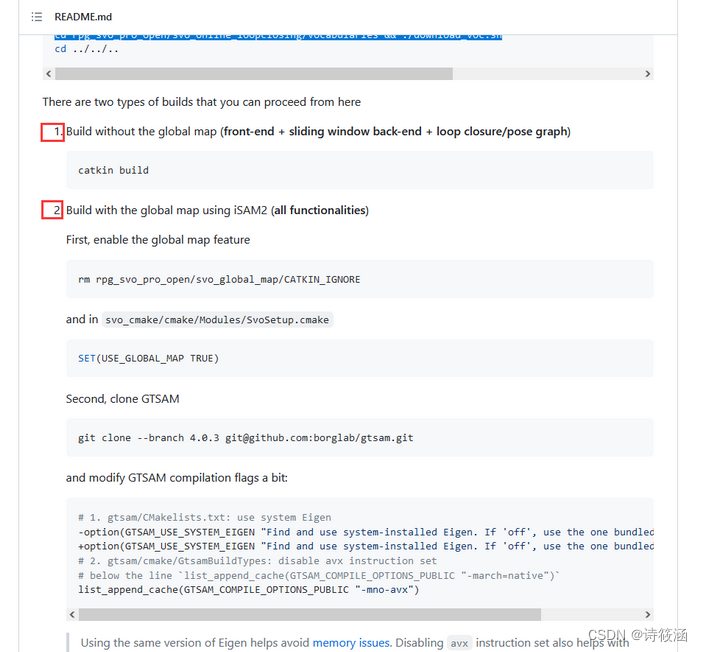
那我就下一步是进入到编译环节了。都说有两种编译方式,再看官方github里的readme,原来是readme里面就这么说的有两种编译方式,那我就先试一下简单的第一种catkin build GitHub - uzh-rpg/rpg_svo_pro_open
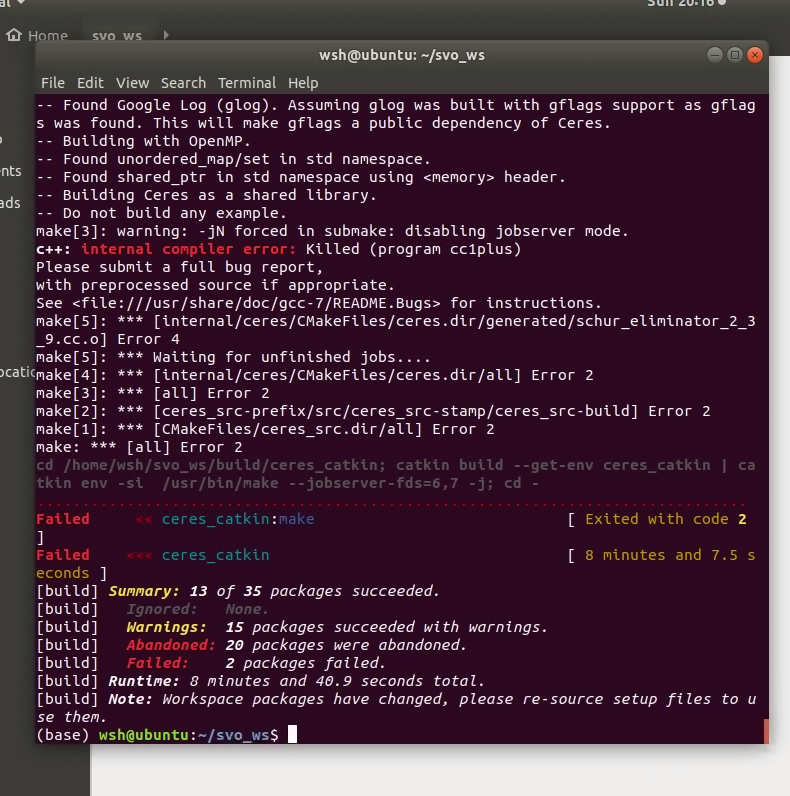
出现了一个fail,细看发现这是内存不够卡死报的错。
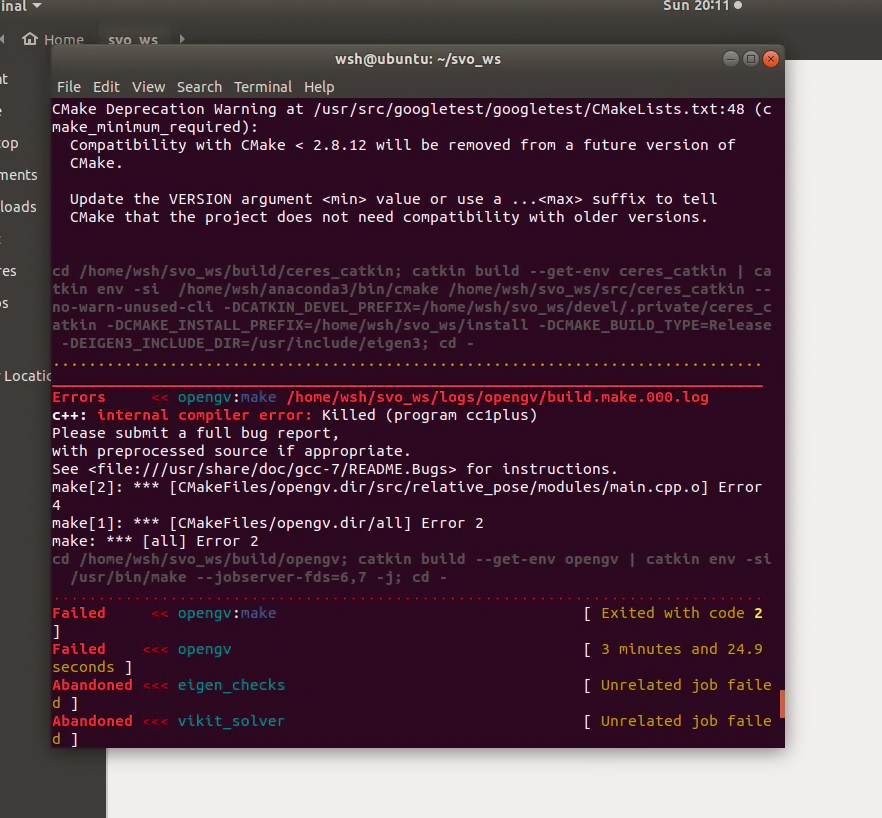
之前虚拟机分配的内存是4G,我现在分为8G看看
这回看着似乎全编译完了,总共34个包,处理业务内存不够挂掉,没有因为其他原因编译挂掉或者终止。
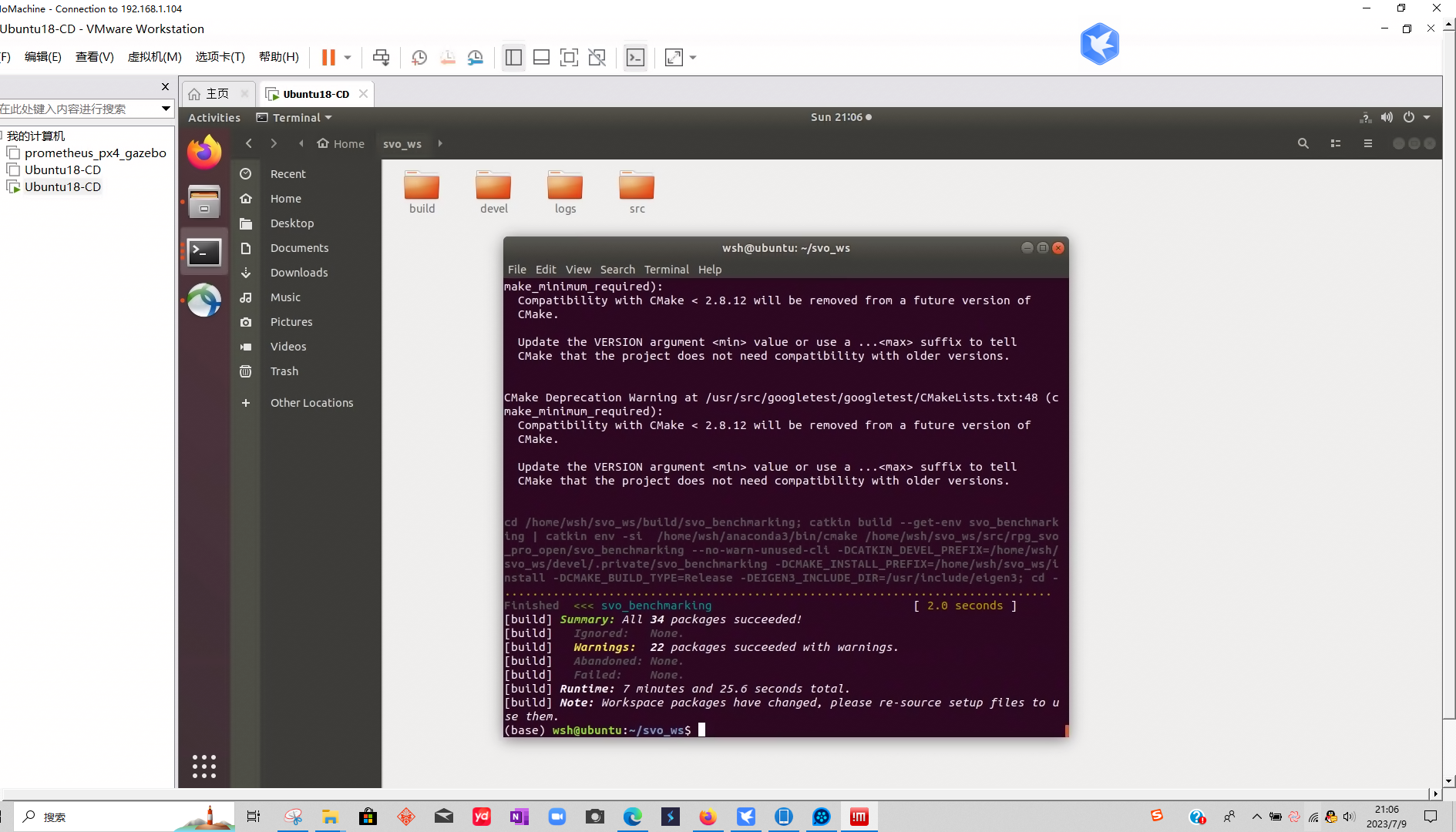
在下面这个人的博客里说是38个包 SVO2.0 安装编译_svo安装-CSDN博客
那下一步是不是可以运行bag包了?官方readme 没有找到运行命令,看下面博客说运行命令是这个 【SLAM】SVO2.0编译运行和论文代码解读_svo2 slam-CSDN博客

那我帮个euroc的bag包进去跑试试。
roslaunch svo_ros euroc_vio_stereo.launch //注意先source rosbag play MH_01_easy.bag
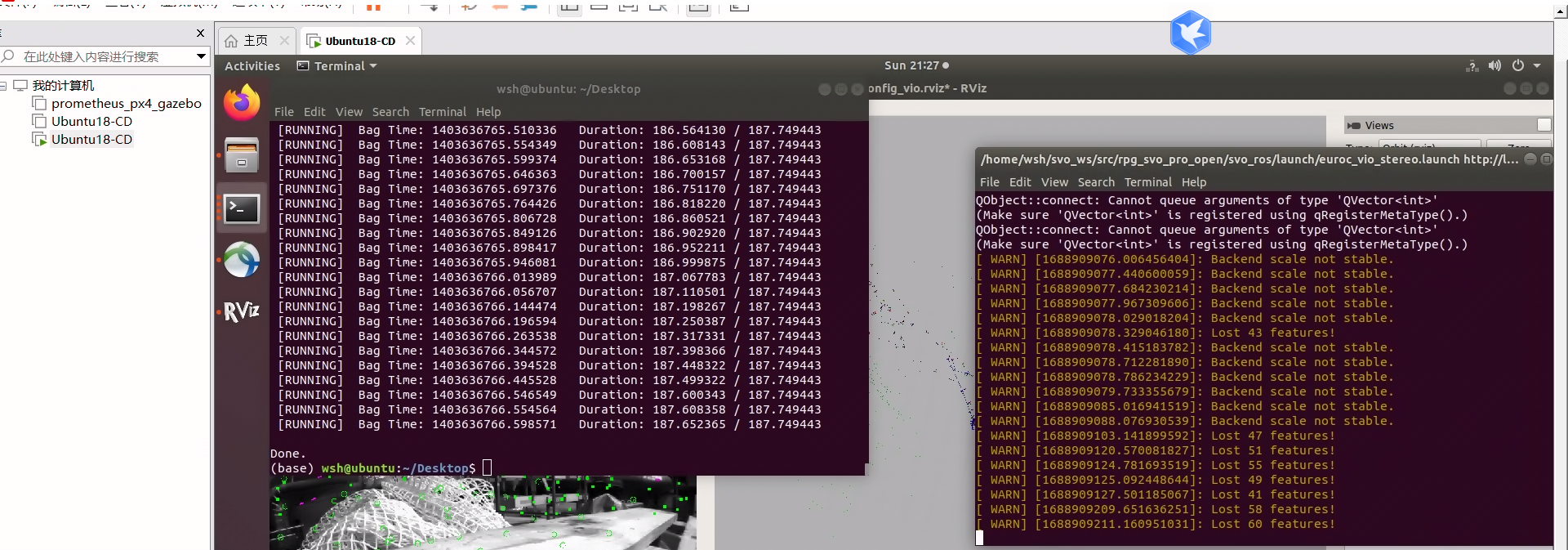
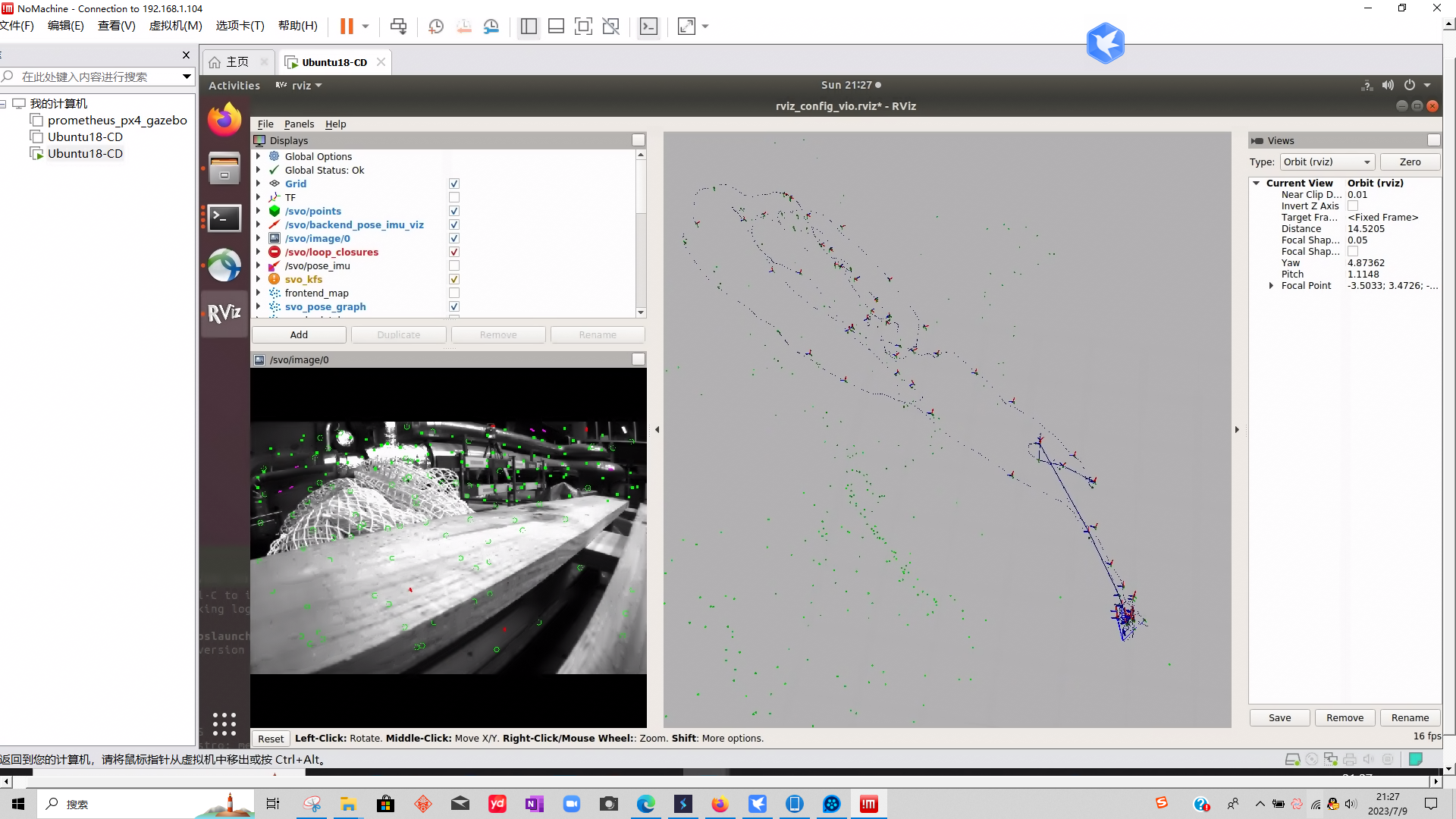
MH_01整个跑完
之前看到一篇博客说SVO是他装过的最难装的代码,差点把我吓到了。 【SLAM】SVO2.0编译运行和论文代码解读_svo2 slam-CSDN博客
我再试着跑个D435i的包 参考这个仓库 https://gitee.com/maxibooksiyi/SvoPro4Realsense 我再svo_ros对应文件夹下新建了下面两个文件 svo_ros/launch/d435i_office_stereo.launch svo_ros/param/calib/realsense_stereo.yaml
roslaunch svo_ros d435i_office_stereo.launch //注意先source rosbag play maxi_d435i_20221017_1.bag
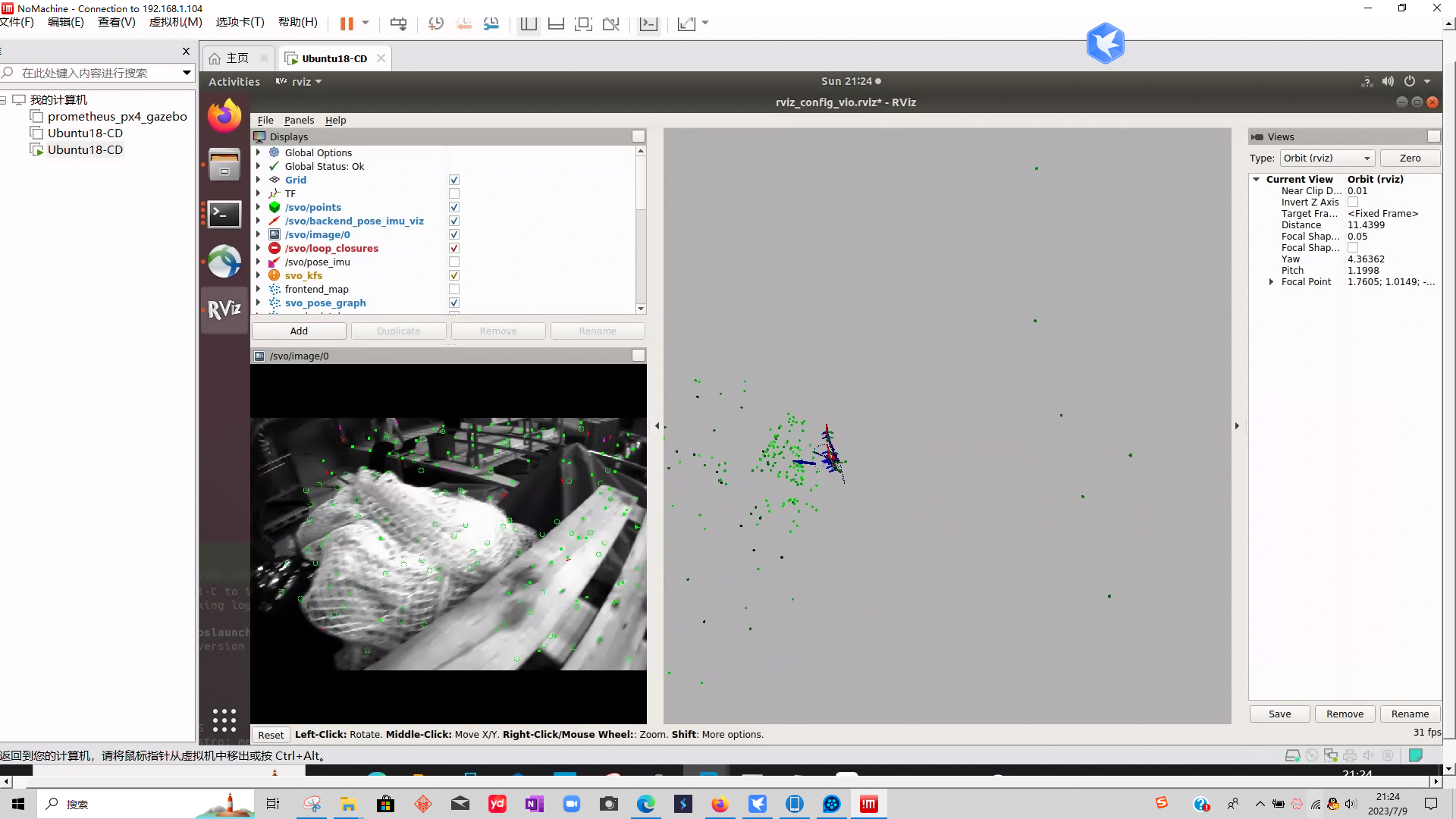
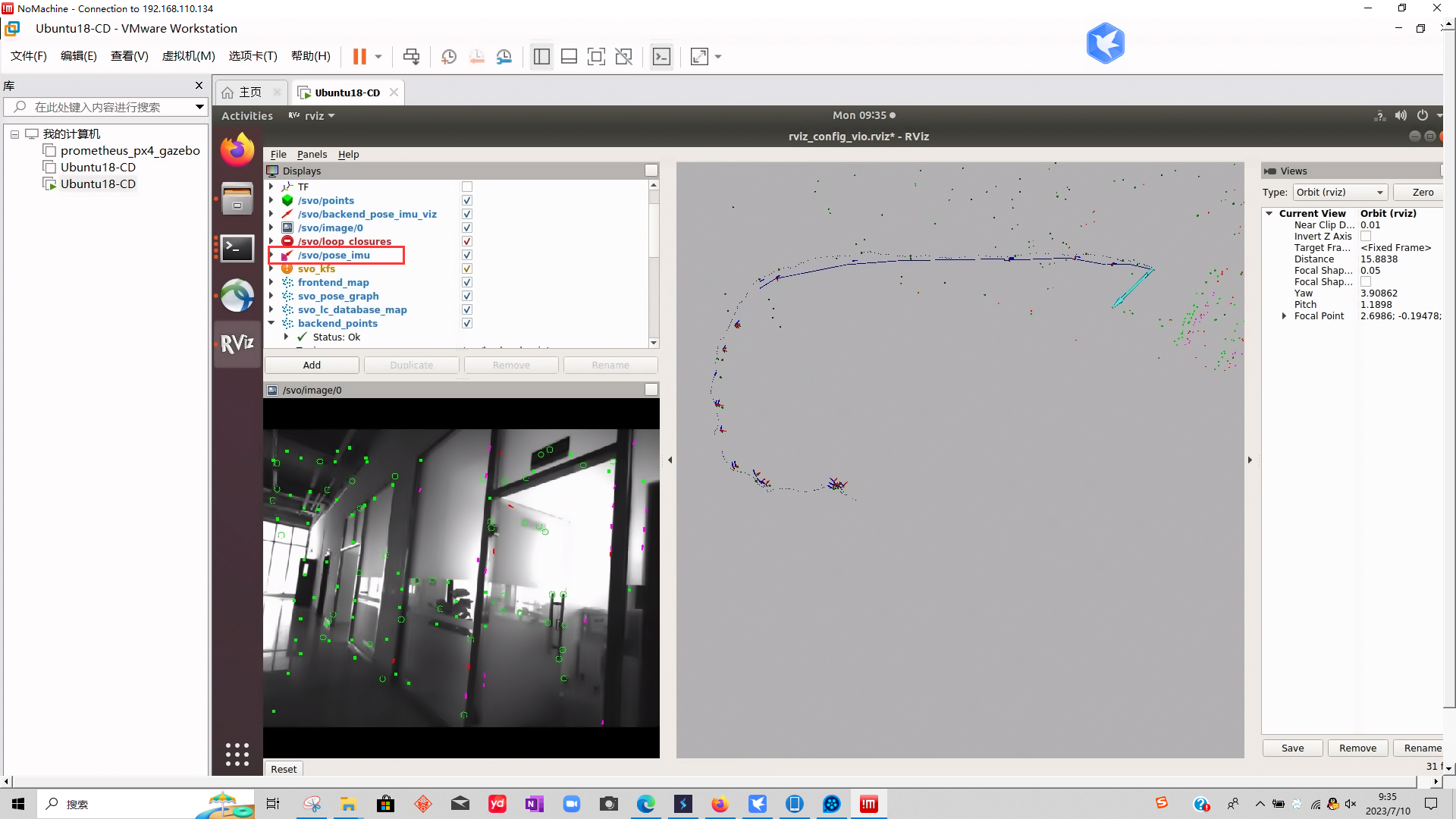
真的基于我录的D435i的bag包跑起来了!!!!!!!!!!!!!!!!!!效果还不错看着。
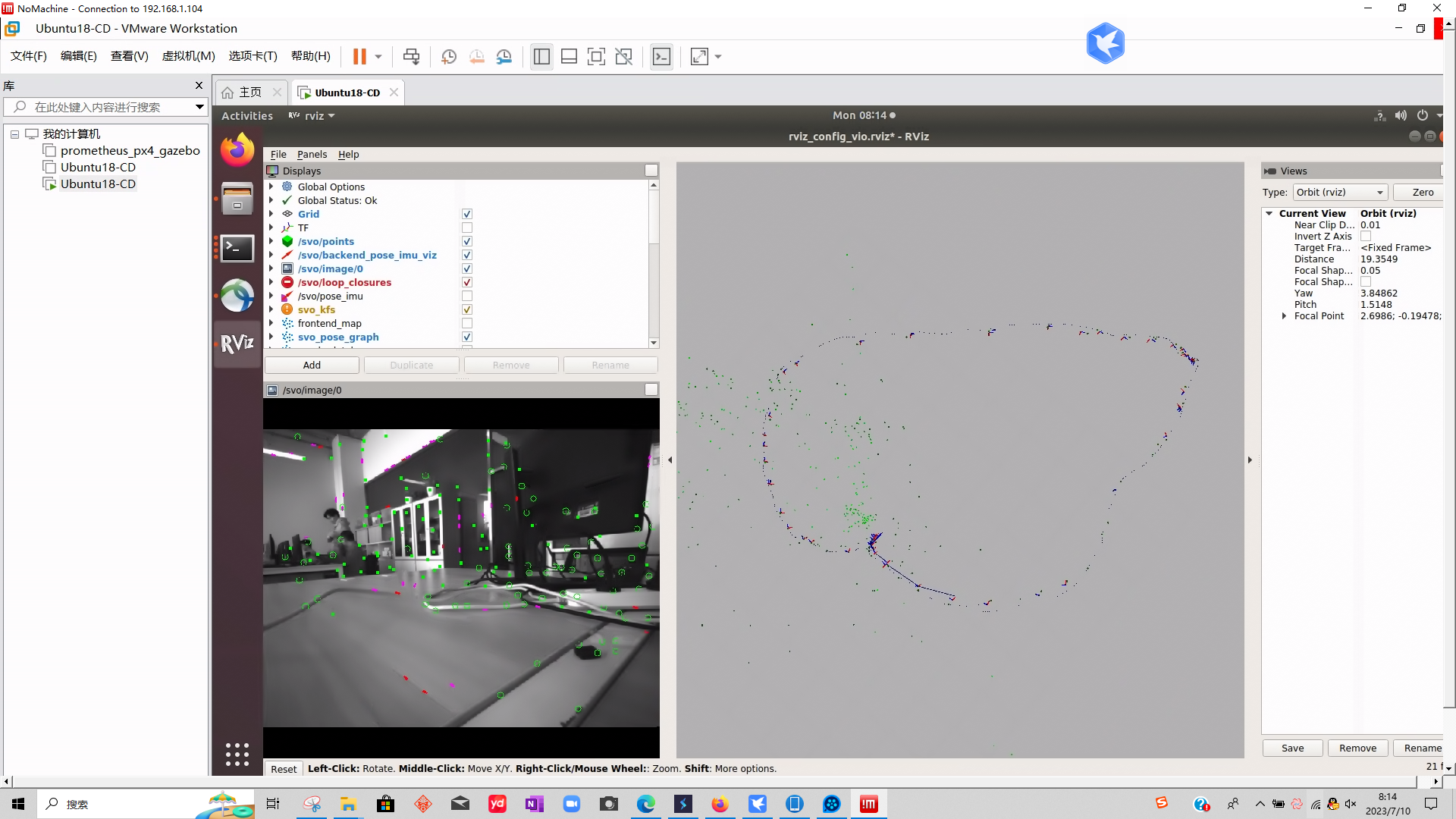
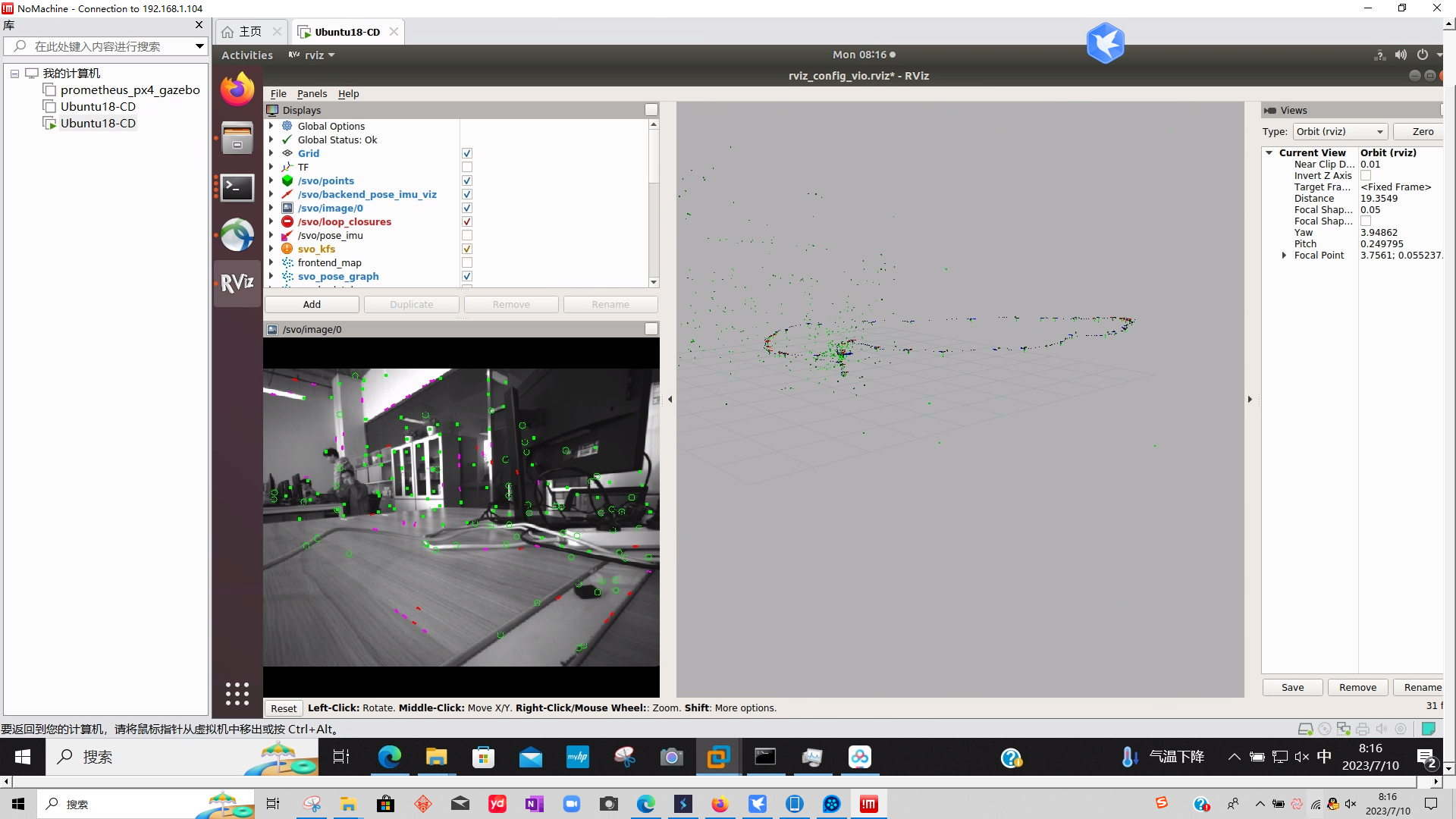
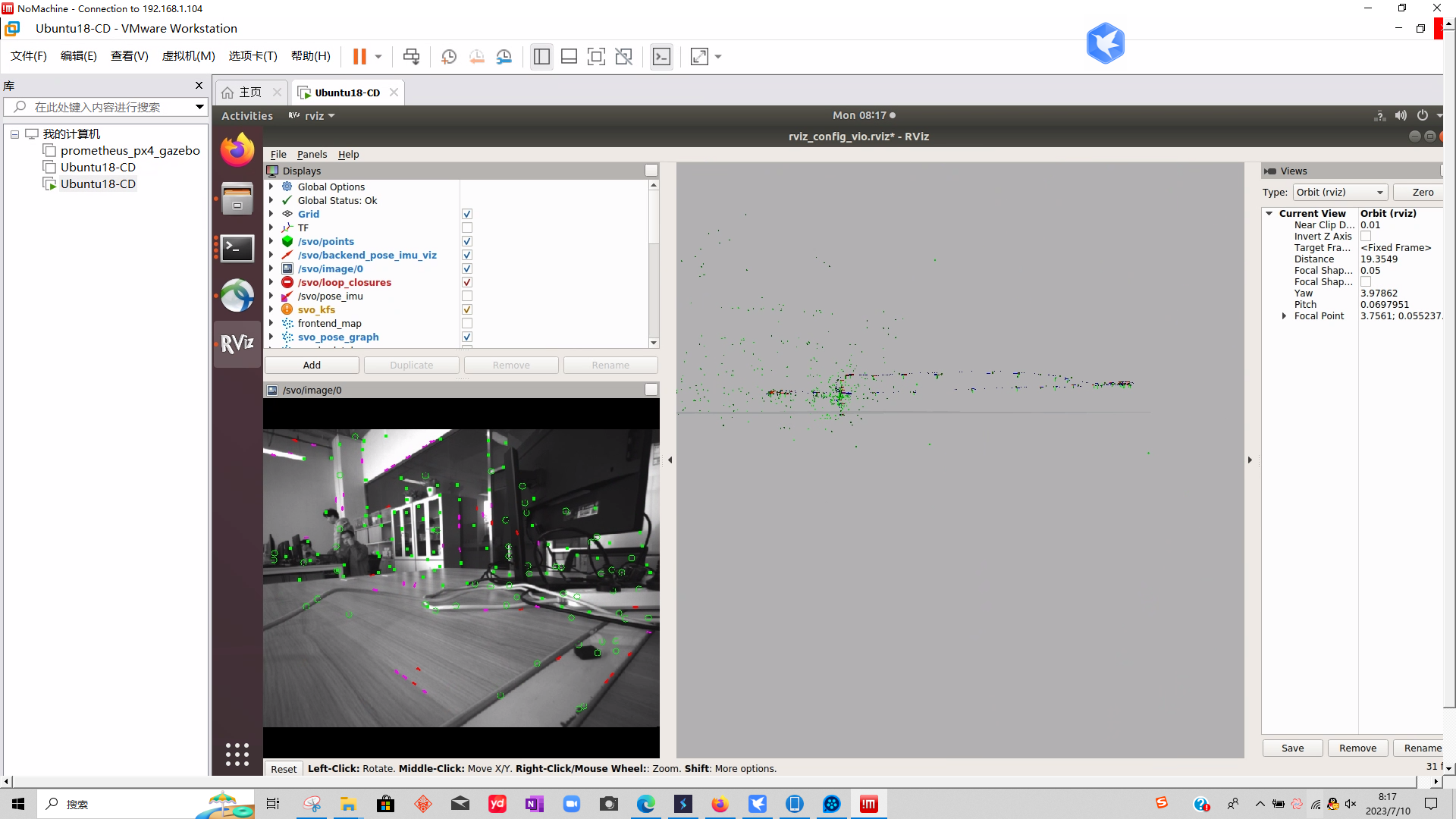
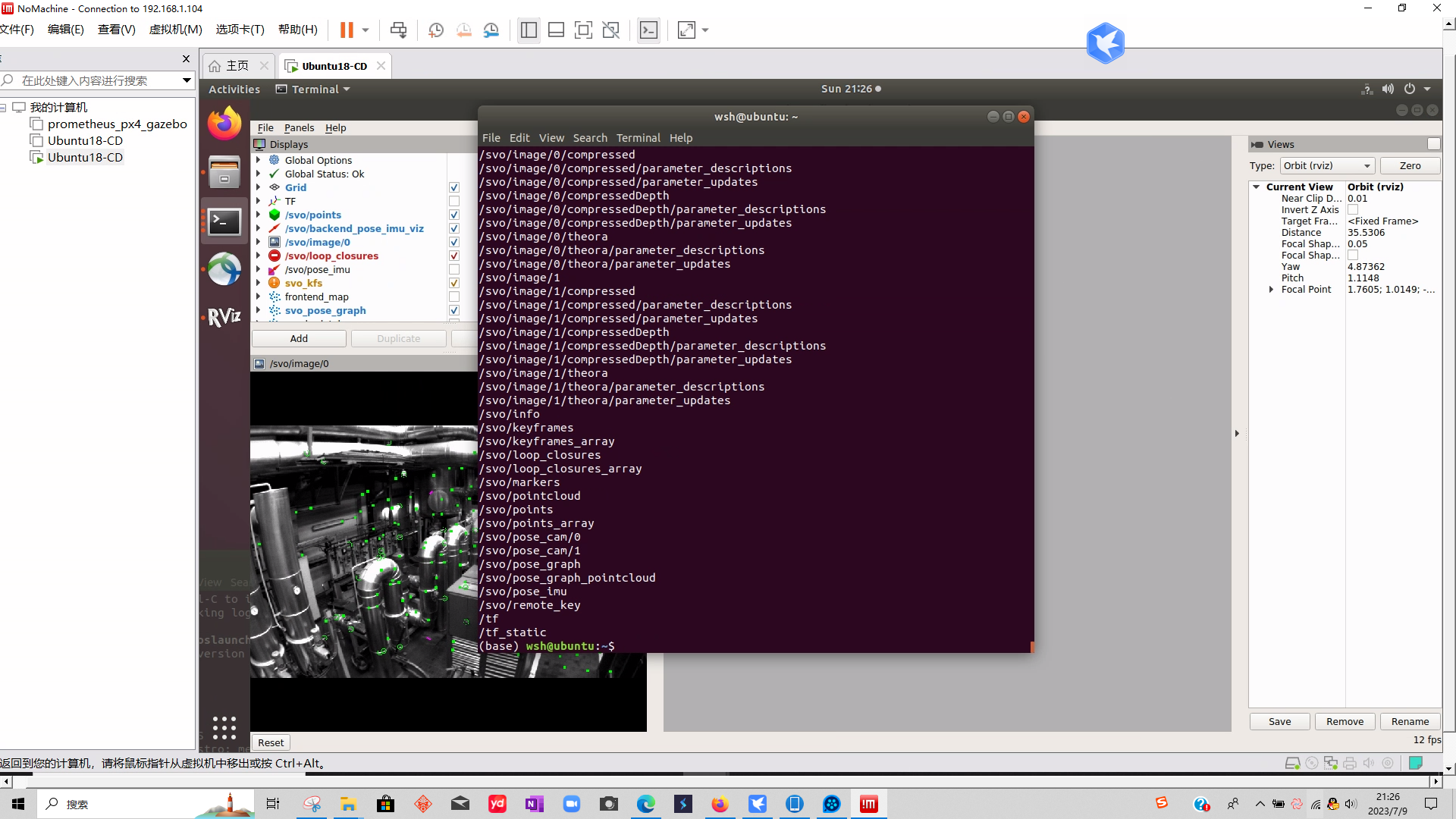
跑D435i的bag包的时候,图像话题频率30hz,输出位姿频率15hz。
确实好像就是用/svo/pose_imu话题作为最终输出的位姿的,也是rviz里面那个蓝色的大箭头,
感觉基本按照官方readme走就没有问题应该 我这个虚拟机ubuntu18.04上的opencv版本是3.2.0


















 2759
2759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











