







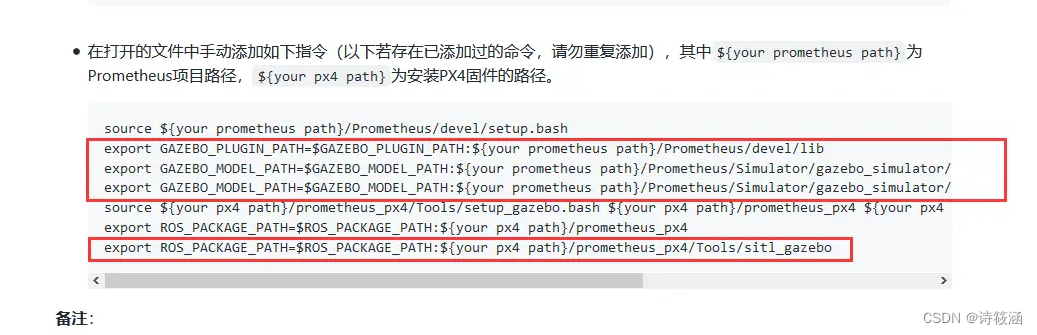
跑PX4 gazebo仿真需要添加的路径只有三种,px4功能包路径,model路径,plugin路径。
就是为了可以找到PX4功能包,已经所用到的model和pulgin。
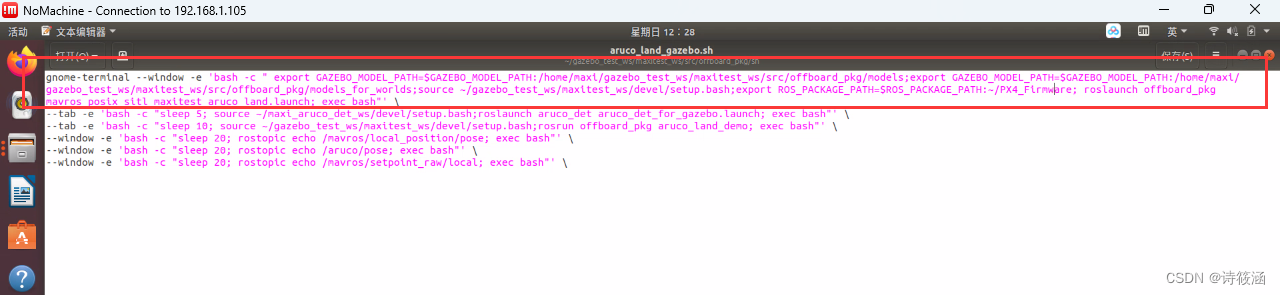
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
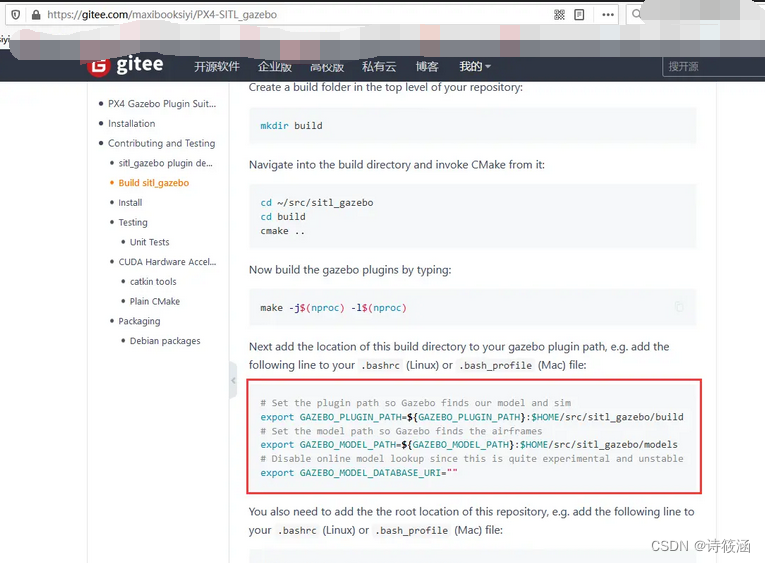
export GAZEBO_PLUGIN_PATH=${GAZEBO_PLUGIN_PATH}:$HOME/src/sitl_gazebo/build
export GAZEBO_MODEL_PATH=${GAZEBO_MODEL_PATH}:$HOME/src/sitl_gazebo/modelsgazebo里面本身就三种东西 world model plugin
world不用添加路径因为launch文件里面会直接给world文件的绝对路径让launch文件可以找到world文件,world里面是model组成的,world里面的model和无人机model里的model以及有的model用到的plugin需要能自动找到。
<arg name="world" default="$(find offboard_pkg)/worlds/empty.world"/>
<arg name="sdf" default="$(find offboard_pkg)/models/$(arg vehicle)/$(arg vehicle).sdf"/>
再看下面这些,就不会混乱,也不用死记。
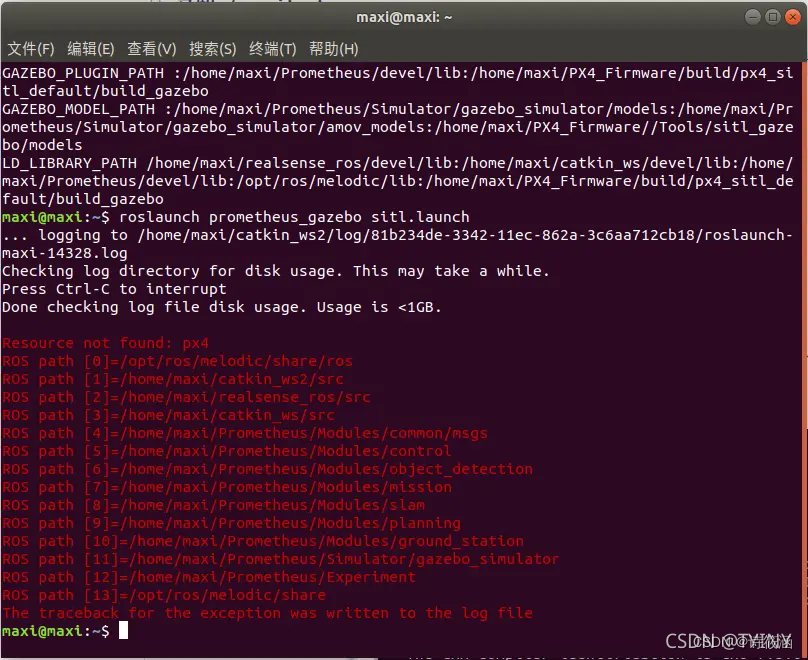
如果不添加px4功能包路径,就会看到经常出现的这个报红。















 1219
1219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









