







首先是发现高飞的gazebo仿真似乎是用的这个,后来发现之前在古月居看到的无人机仿真也是这个rotors_simulator
https://gitee.com/maxibooksiyi/ZJU_GAZEBO_ENV/tree/main/gazebo-environment-main

https://mp.weixin.qq.com/s/jurJ6Pfx8xmYddCRm2N-RQ

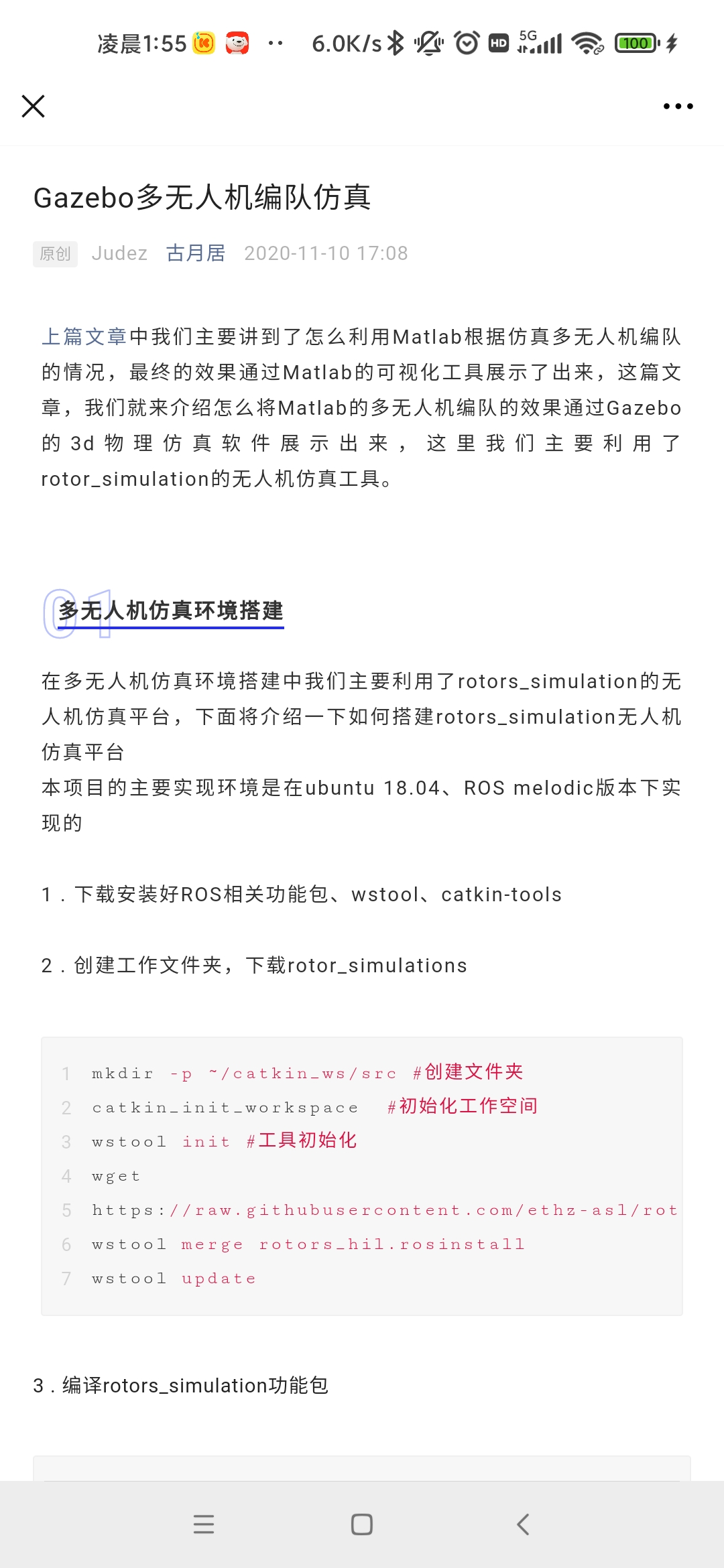
https://www.guyuehome.com/21614

PX4官方文档里面也有说到rotors_simulator
https://docs.px4.io/master/zh/simulation/gazebo_octomap.html

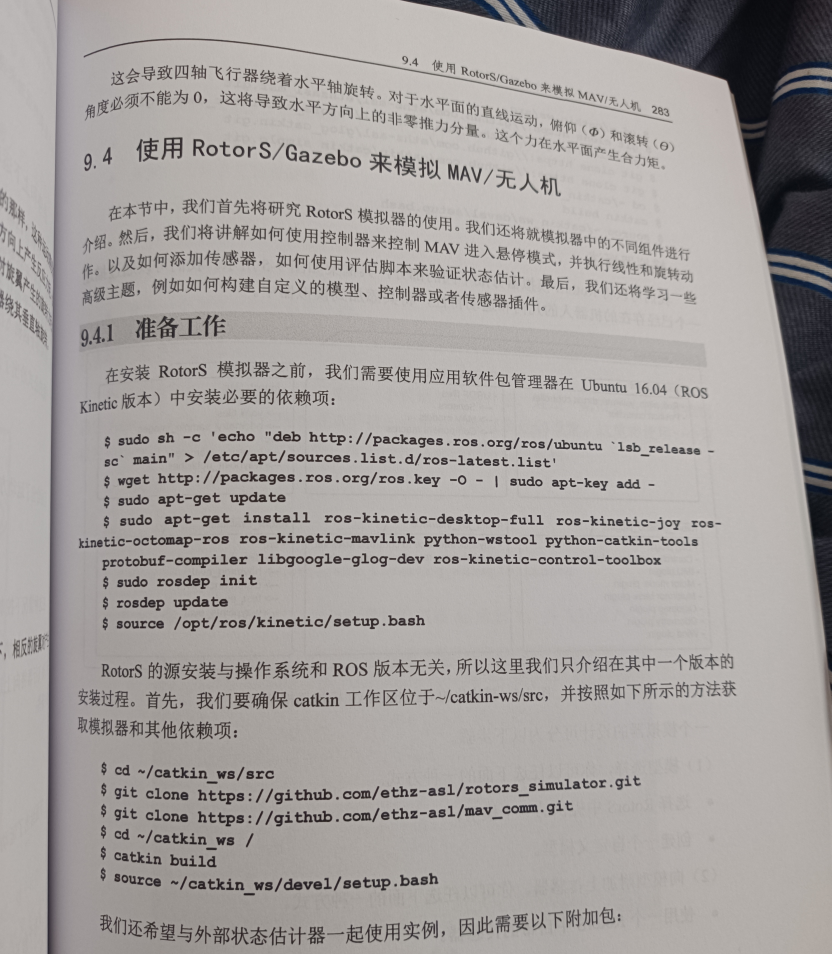
还有我的一本ROS书《ROS机器人编程实战》上讲的无人机仿真也是用的这个功能包。
https://www.educg.net.cn/robot.html

https://mp.weixin.qq.com/s/TWu2XDFoSyyG3hCaJ7FemA


https://mp.weixin.qq.com/s/MW6ZGAwFHshpzGtJODVklw
rotors_simulator给了joy遥控器接口这样应该就可以直接遥控器控飞机了,看来他们想得还挺全的。
https://gitee.com/maxibooksiyi/ZJU_GAZEBO_ENV/tree/main/gazebo-environment-main/src/rotors_simulator/rotors_joy_interface














 4160
4160











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









