






 本文探讨了自动驾驶系统的关系,并重点解析了自动泊车的关键算法。通过几何关系和车辆运动学模型,阐述了自动泊车中内外侧转角与转弯半径的联系,以及车辆速度的关系。
本文探讨了自动驾驶系统的关系,并重点解析了自动泊车的关键算法。通过几何关系和车辆运动学模型,阐述了自动泊车中内外侧转角与转弯半径的联系,以及车辆速度的关系。
自动驾驶系统关系与自动泊车原理
- 自动驾驶系统关系
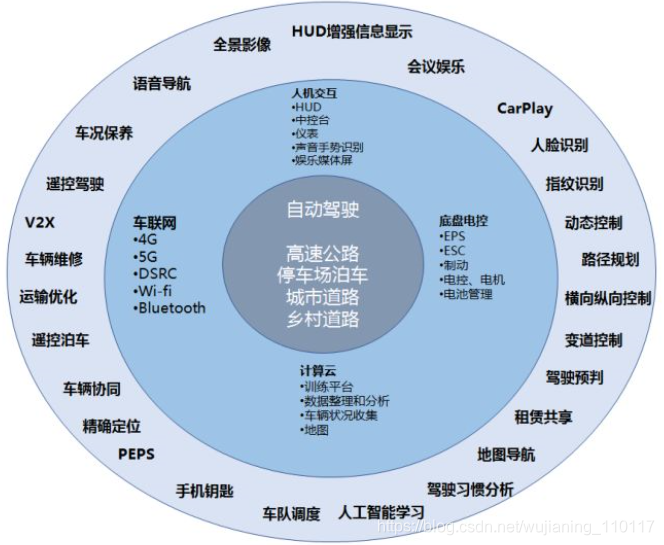
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
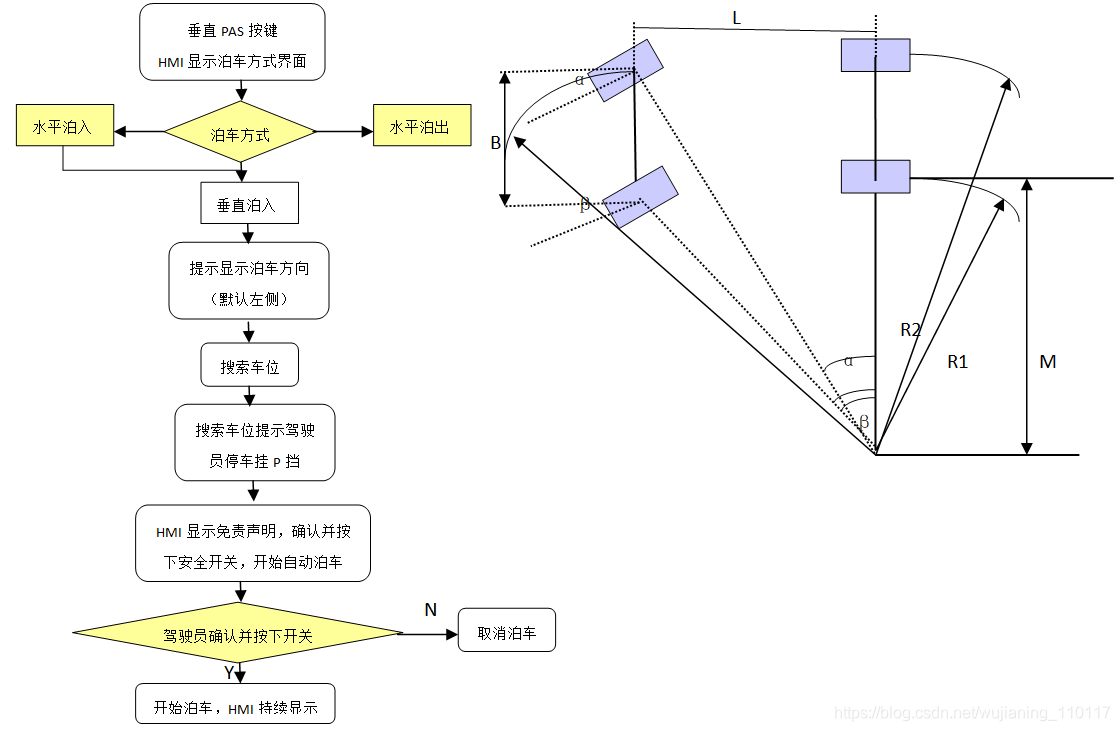
图2. 关键算法解析——自动泊车
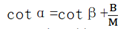
外侧转角α和内侧转角β如下关系式
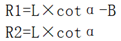
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
根据几何关系,后轴中心点 与前轴中心点
与前轴中心点
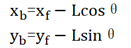
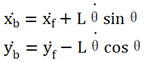
求导得到速度关系
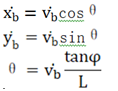
以后轴中心为基准点,车辆低速运动学模型为

自动驾驶系统关系与自动泊车原理
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
图2. 关键算法解析——自动泊车
外侧转角α和内侧转角β如下关系式
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
根据几何关系,后轴中心点与前轴中心点
求导得到速度关系
以后轴中心为基准点,车辆低速运动学模型为
 2183
2884
2183
2884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























