







 本文详细分析了自动泊车系统的工作原理,包括环境感知、停车位检测、路径规划和控制等环节,以及超声波传感器在系统中的应用。此外,还介绍了自主泊车系统,包括其定义、功能和不同技术路线,如偏车端和偏场端方案,强调了智能化车端和场端在自主泊车中的关键作用。
本文详细分析了自动泊车系统的工作原理,包括环境感知、停车位检测、路径规划和控制等环节,以及超声波传感器在系统中的应用。此外,还介绍了自主泊车系统,包括其定义、功能和不同技术路线,如偏车端和偏场端方案,强调了智能化车端和场端在自主泊车中的关键作用。
自主泊车技术分析
一.自动泊车系统
- 定义
自动泊车系统主要是利用遍布车辆自身和周边环境里的传感器,测量车辆自身与周边物体之间的相对距离、速度和角度,然后通过车载计算平台或云计算平台计算出操作流程,并控制车辆的转向和加减速,以实现自动泊入、泊出及部分行驶功能。
整个泊车过程大致可包含以下五大环节:环境感知停车位检测与识别泊车路径规划泊车路径跟随控制模拟显示
按照泊车方式,分为三种模式,如图1所示:平行式泊车垂直式泊车斜列式泊车图1 平行泊车 垂直泊车 斜列式泊车
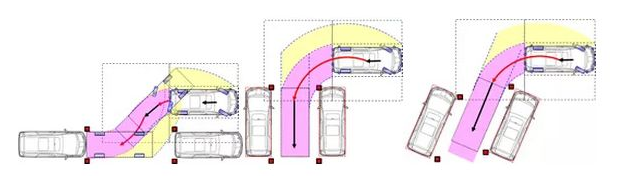
按照自动化程度等级,自动泊车可以分为:半自动泊车全自动泊车半自动泊车系统为驾驶员操控车速,计算平台根据车速及周边环境来确定并执行转向,对应于SAE自动驾驶级别中的L1;全自动泊车为计算平台根据周边环境来确定并执行转向和加减速等全部操作,驾驶员可在车内或车外监控,对应于SAE L2级。
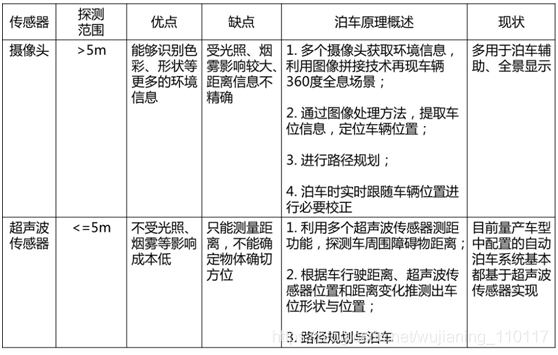
按照所采用传感器的种类,半自动/全自动泊车可以分为:超声波自动泊车基于超声波与摄像头的融合式自动泊车
两种传感器的对比如表1所示:
表1
2 原理方案
整个泊车过程是哪几个环节?环境感知、停车位检测与识别、泊车路径规划、泊车路径跟随控制以及模拟显示五大环节!
下面我们就以最常见的超声波自动泊车系统为例,从五大环节来介绍:
▲环境感知如图2所示,为一种典型的超声波自动泊车系统的环境感知方案,由12个超声波雷达组成。
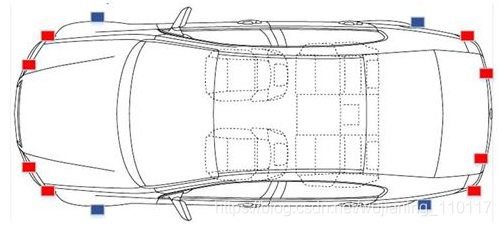
图2■8个超声波雷达:泊车过程中检测车身周边的障碍物,避免剐蹭■4个超声波雷达:泊车开始前进行车位的探测及在泊车过程中提供侧向障碍物信息
▲停车位检测与识别自动泊车超声波车位探测系统主要是由布置在车身侧面的超声测距模块构成的, 通过超声传感器对车辆侧面的障碍物进行探测, 即可完成车位探测及定位。超声波车位探测的过程如图3 所示。在探测车位时, 车辆以某一恒定车速V平行驶向泊车位:「1」当车辆驶过 1 号
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3998
3998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









