







 为了解决低能见度环境下的传感问题,研究提出了一个结合红外热像仪和毫米波雷达的系统。重点在于通过RGB-D相机的深度信息进行两者的外部标定,解决14位温度和稀疏距离测量的标定挑战。采用LM算法进行外参标定,并通过在红外图像上投影雷达点来验证结果的准确性。
为了解决低能见度环境下的传感问题,研究提出了一个结合红外热像仪和毫米波雷达的系统。重点在于通过RGB-D相机的深度信息进行两者的外部标定,解决14位温度和稀疏距离测量的标定挑战。采用LM算法进行外参标定,并通过在红外图像上投影雷达点来验证结果的准确性。
RGB-D对红外热像仪和毫米波雷达标定
Extrinsic Calibration of Thermal IR Camera and mmWave Radar by Exploiting Depth from RGB-D Camera
摘要
尽管RGB相机和激光雷达用途广泛,但据报道,在低能见度的环境下容易受到火灾或烟雾的影响。为了解决这个问题,我们引入了一个由红外热像仪和毫米波雷达组成的传感器系统。在此过程中,需要在两个传感器之间进行外部标定,而雷达的14位温度和稀疏距离测量的标定是一个挑战。提出了一种利用RGB-D传感器作为深度优化中介的多模态标定方法。为了验证相对位姿估计的正确性,我们提出了将雷达深度投影到红外相机坐标系上的定性结果。
主要贡献:使用LM算法通过RGB-D的深度信息进行红外相机与毫米波雷达的外参标定。

图1 外参标定结果 (b)在红外热图像上投影深度图像(c)
利用估计的外部参数在红外图像上叠加毫米波雷达点。
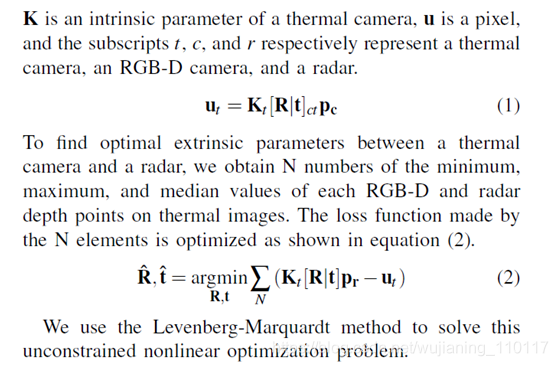
K是红外相机的内参,u是像素点,下表t,c,r分别代表红外相机、RGBD相机以及毫米波雷达。
为了找到红外相机和毫米波雷达之间的外部标定参数,我们在红外图像上得到了N组数据在每个RGB-D相机和毫米波雷达深度点上最小值、最大值以及中间值。对N个元素的损失函数进行优化,如(2)所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 179
179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









