






具身活动总结:PNP机器人在FAIR plus 2025机器人链接会中呈现具身智能机器人数据集和操作等多项技术
原创 PNP机器人 PNP机器人 2025年05月06日 11:31 北京
活动预告:PNP机器人将携具身智能解决方案,亮相2025年5月8-11日在长沙举办的中国图象图形大会,欢迎现场体验和关注。

具身智能活动总结:2025年4月24-26日日,全球机器人领域的盛会——“智启未来、链动全球-机器人全产业链接会(FAIR plus 2025)”在深圳成功举办,这场汇聚200+家机器人企业、院士专家及60+个国家、3.5万专业观众参加。

PNP机器人在FAIR plus 2025会议中,展现了丰富多彩的活动。PNP 机器人凭借其在具身智能领域机器人数据集方案的卓越成果,成为了会议的一大亮点。具身智能作为机器人技术的前沿领域,强调机器人通过与环境的交互来获取知识和技能,使机器人能够更加自然、灵活地适应复杂多变的现实世界。而数据作为人工智能与机器人技术发展的核心基石,对于具身智能机器人的发展具有至关重要的意义。

一、PNP 机器人展出具身智能领域机器人数据集方案
1.1 当前获取足够丰富、真实且有效的机器人数据目前仍然是整个行业面临的重大挑战
这不仅仅是简单的数据收集问题,而是一个复杂且多维度的难题,涉及到数据的多样性、准确性、可扩展性以及数据收集过程中的成本控制等多个方面。首先,数据的多样性是构建高效具身智能数据集的关键要素之一。现实世界中的场景和任务复杂多变,机器人需要在各种不同的环境下执行各种不同的任务,这就要求数据集必须涵盖丰富多样的场景和任务类型。例如,工业生产中,机器人可能需要在高温、高湿度、充满灰尘的恶劣环境下进行高精度的零部件装配;而在家庭服务场景中,机器人则需要在相对较为舒适但布局复杂、物品繁多的环境中完成诸如清洁、整理、搬运等任务。此外,任务的类型也多种多样,包括但不限于抓取、放置、操作工具、移动物体、与人类协同作业等。只有包含了丰富多样场景和任务的数据集,才能使机器人在实际应用中具备广泛的适应性和灵活性。

1.2 PNP 机器人展示了其基于模仿学习的数据集方案
模仿学习通过让机器人模仿人类的操作行为来学习任务,这种方式能够直接获取到真实世界中有效的操作数据,而且这些数据与机器人的实际应用需求高度相关。与基于仿真、视频流等方向的数据方案相比,模仿学习的数据集方式能够更好地捕捉到机器人在实际操作中的细微动作和复杂交互,从而为机器人的学习和优化提供更为精准的数据支持。PNP 机器人的数据集方案可以涵盖了多种不同场景和任务下的人类操作示范数据,通过对这些数据的收集、整理和标注,为机器人的模仿学习提供了丰富的学习资源。例如,在工业装配任务中,PNP 机器人收集了人类工人在不同装配任务中的操作动作、力度、速度等多维度的数据,以及相应的视觉图像和环境感知信息。这些数据不仅能够帮助机器人学习如何正确地完成装配任务,还能够使机器人了解到在不同情况下可能出现的误差和故障模式,从而提高机器人的鲁棒性和适应性。

1.3 PNP 机器人还展示了一种与 Franka 机器人等同构的机器人主从操作方案
PNP机器人提供的这种主从操作方案采用了单臂 / 双臂的操作模式,其中主操作器由人类操作者控制,从操作器则是机器人。通过优化控制算法,PNP 机器人实现了主从操作之间的高度同步和精准映射,使得操作者在进行模仿学习操作时,能够更加自然、流畅地将动作传递给机器人。特别是其同构 7 轴主从设计,极大地提升了操作的灵活性和自由度,使得机器人的操作更加接近人类仿生的动作方式。这种主从操作方案在多个方面具有显著的优势。一方面,它能够充分利用人类操作者的经验和技能,快速地将人类的操作知识传授给机器人,从而加速机器人的学习过程。另一方面,通过主从操作,机器人能够在人类操作者的监督和指导下,逐步学习和适应不同的任务和环境,提高其自主操作能力。
PNP机器人
,赞1
PNP 机器人的这一数据集方案和主从操作方案,为具身智能领域的发展提供了重要的技术支撑和数据资源。它不仅有助于解决当前机器人数据收集的难题,还为机器人的学习和优化提供了新的思路和方法。通过这种方案,机器人能够更好地从人类的操作中学习,不断提升自身的能力和性能,为未来具身智能机器人的广泛应用奠定了坚实的基础。
二、PNP 机器人带来多模态信息融合创新案例
随着人工智能与机器人技术的不断发展,多模态信息融合逐渐成为实现高效机器人感知、认知和决策的关键技术。在机器人领域,视觉、语言、触觉等多种模态的信息共同构成了机器人对世界的全面感知与理解。在 FAIR plus 2025 会议中,PNP 机器人通过其在多模态信息融合方面的创新案例,向全球展示了其在这一前沿领域的深厚技术实力和独特创新思维。
在 VLA(视觉 - 语言 - 动作)模型架构方面,近年来的研究不断探索多种融合视觉和语言输入的方法,以实现更加高效、自然的人机交互和机器人自主决策。多模态融合的重要性在于,它能够使机器人更加全面、准确地理解复杂的现实环境和人类指令,从而更好地完成各种任务。PNP 机器人在 VLA 模型架构方面的研究成果,为实现高效的视觉 - 语言 - 动作交互提供了重要的技术参考。他们的模型架构通过巧妙地设计多模态信息的编码、融合和解码过程,使得机器人能够更加精准地理解和执行各种任务。具体来说,该模型架构首先对视觉信息和语言信息分别进行独立的编码,提取出各自的关键特征和语义信息。在编码过程中,采用先进的卷积神经网络(CNN)和循环神经网络(RNN)等深度学习技术,对视觉图像中的物体、场景、空间关系等信息进行高效提取,同时对语言指令中的词汇、语法、语义等信息进行深度解析。然后,通过融合模块将这两种模态的信息进行深度融合,采用注意力机制等技术,使机器人能够自动学习到不同模态信息之间的关联和对应关系,从而更加准确地理解任务目标和操作要求。

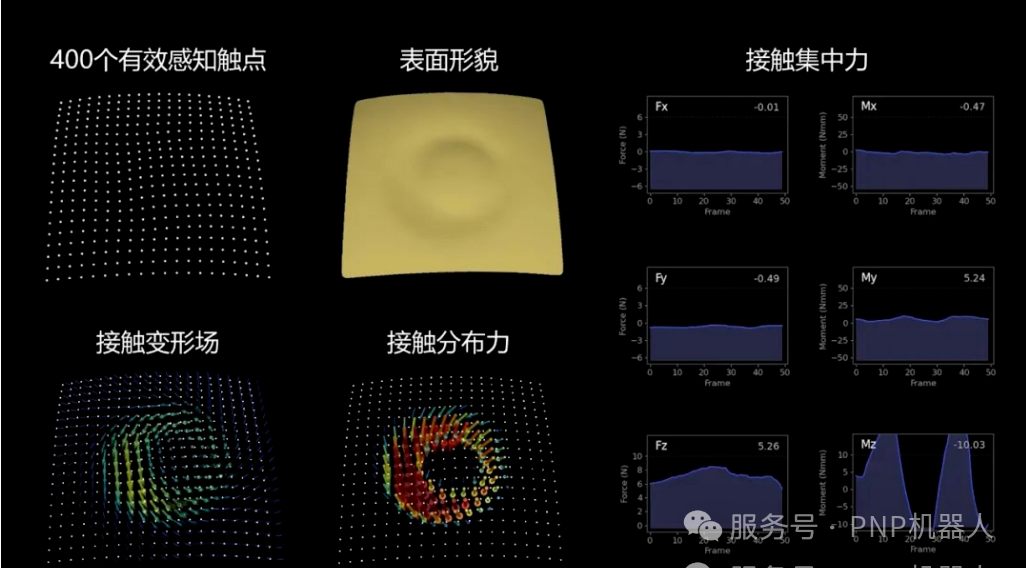
此外,PNP 机器人结合橡木果触觉方案,展出的基于视触觉感知的抓取方案是多模态信息融合的又一创新典范。触觉作为机器人感知物体表面特性和操作力反馈的重要模态,在机器人抓取和操作任务中具有不可替代的作用。PNP 机器人的视触觉感知抓取方案通过将视觉信息与触觉信息相结合,为机器人提供了更加全面、细致的物体感知能力。在该方案中,PNP 机器人利用先进的视觉传感器获取物体的外观、形状、位置等信息,同时采用触觉传感器感知物体表面的纹理、硬度、摩擦系数等触觉特征。在抓取过程中,机器人首先通过视觉信息快速定位物体并规划初始抓取路径,然后在接触物体的瞬间,触觉传感器实时反馈物体表面的触觉信息,机器人根据这些信息实时调整抓取力度和抓取姿态,以确保物体的稳定抓取。
PNP机器人
这种视触觉融合的抓取方案对于多模态表示学习、融合技术和任务特定适应方法的研究具有重要意义。在多模态表示学习方面,该方案为如何将视觉和触觉这两种不同模态的信息映射到一个统一的特征空间提供了实践案例。通过深度学习算法,能够学习到视觉和触觉信息之间的内在关联和互补特性,从而构建出更加丰富、全面的物体表示模型。这种表示模型不仅包含了物体的外观和形状信息,还包括了物体的表面物理特性,为机器人的后续操作提供了更准确的决策依据。在融合技术方面,视触觉感知抓取方案探索果多种有效的信息融合方法。例如,采用早期融合策略,在特征提取阶段将视觉和触觉信息进行初步融合,提取出融合后的低层特征;同时结合晚期融合策略,在决策阶段将视觉和触觉信息的处理结果进行综合决策,从而充分发挥两种模态信息的优势。此外,设计专门的跨模态注意力机制,可以使机器人能够根据任务需求自动调整对不同模态信息的关注程度。在抓取易滑动物体时,机器人会更加关注触觉信息中的摩擦系数和滑动趋势,而在抓取形状复杂的物体时,则会更多地依赖视觉信息来确定抓取点和抓取路径。通过这些多模态信息融合的创新案例,可以提升机器人感知和操作能力方面的巨大潜力。这些技术不仅能够提高机器人在复杂环境中的任务执行效率和准确性,还为实现更加自然、灵活的人机协作提供了可能,为未来机器人的智能化发展开辟了新的道路。
三、PNP 机器人在 “人工智能与机器人研究开发高校专场” 论坛中发表演讲
在 FAIR plus 2025 会议期间,PNP 机器人在 “人工智能与机器人研究开发高校专场” 论坛中发表了精彩演讲,分享了其在具身智能数据集和操作策略方面的最新进展。PNP 机器人创始人包文涛先生详细阐述了当前具身智能领域面临的关键问题和挑战,并介绍了 PNP 机器人在应对这些挑战方面所采取的策略和技术成果。

包文涛先生强调了真机实操数据在机器人数据集构建中的重要性。目前,真机实操数据仍然是构建有效的机器人数据集的最有效方式。尽管基于仿真和视频流的数据方案已经取得了一定的进展,但它们在真实性和复杂性方面仍然无法与真机实操数据相媲美。收集真机实操数据需要在实际环境中进行大量的实验和操作,这不仅需要投入大量的人力、物力和时间,还需要在不同的环境和任务条件下进行,以确保数据的多样性和代表性。例如,在工业生产中,收集机器人在不同生产线上的操作数据,需要模拟各种不同的生产场景和任务要求,包括不同的物料、工具、操作流程等。同时,还需要考虑环境因素的影响,如温度、湿度、光照等,以确保机器人能够在各种实际条件下正常运行。包文涛先生指出,一些头部的具身智能公司已经意识到这一点,并投入了大量资源进行真机实操数据的收集和整理,在具身智能数据集领域取得了领先地位。
包文涛先生讨论了当前热点的合适架构设计对于实现高效的视觉 - 语言 - 动作交互的重要性。不同的架构在处理多模态信息时具有各自的优势和局限性。例如,某些架构在处理长序列信息时表现较好,能够捕捉到时间序列中的长期依赖关系,这对于机器人在执行长时域任务时的规划和决策至关重要。而另一些架构则在模型参数效率上更具优势,能够在有限的计算资源下实现高效的特征提取和信息融合。PNP 机器人在架构设计方面进行了深入的研究和探索,提出了一种创新的多模态融合架构,该架构能够根据不同的任务需求,动态地调整各模态信息的权重和处理方式,从而实现更加高效、灵活的视觉 - 语言 - 动作交互。例如,在机器人执行物体抓取任务时,该架构能够更加注重视觉和触觉信息的融合,以确保抓取动作的准确性和稳定性;而在执行导航任务时,则更加注重视觉和语言信息的结合,以实现对环境的准确理解和路径规划。
包文涛先生也分享了长时域任务规划方面的研究进展。当前的高层任务规划器虽然在一定程度上能够处理复杂的任务序列,但在应对环境变化和实时调整任务计划方面仍然存在不足。例如,在执行清洁房间任务时,可能会遇到意外情况,如物品位置变动或新物品出现,当前规划器可能难以实时调整任务计划,导致任务执行效率低下。为了解决这一问题,开发一种更加高效的长时域任务规划器较为重要。研究热点有通过结合深度强化学习和常识知识库,赋予机器人更强的感知能力和环境适应能力等方法。深度强化学习使机器人能够在不断的试错过程中学习到最优的任务规划策略,而常识知识库则为机器人提供了关于物体、环境和任务的先验知识,使其能够在面对新情况时快速做出合理的决策。例如,当机器人发现房间中出现了一个新的障碍物时,它可以根据常识知识库中的信息判断该障碍物是否会影响清洁任务,并根据深度强化学习得到的策略,实时调整清洁路径,绕过障碍物继续完成任务。
PNP 机器人在 “人工智能与机器人研究开发高校专场” 论坛中的演讲,不仅展示了其在具身智能领域的最新研究成果,还为学术界和工业界的合作提供了宝贵的思路和经验。通过不断探索和创新,PNP 机器人正在推动具身智能技术的发展,为机器人在复杂现实环境中的广泛应用奠定坚实的基础。
四、PNP 机器人接受上海东方卫视采访
在 FAIR plus 2025 展会现场,PNP 机器人接受了上海东方卫视的采访,围绕具身智能机器人操作方法、目标、当前发展现状、核心瓶颈等相关问题,PNP 机器人包文涛先生进行了详细而深入的解答。
PNP机器人
,赞17
针对具身智能机器人的操作方法,包文涛先生指出,具身智能的核心在于让机器人通过身体与环境的交互来学习和执行任务。与传统的机器人操作方法不同,具身智能强调机器人的自主感知、学习和决策能力。例如,在工业生产中,具身智能机器人不仅能够按照预设的程序完成零部件的装配任务,还能够通过感知环境的变化,如零部件的位置偏差、装配力度的变化等,实时调整装配策略,确保装配任务的顺利完成。这种操作方法要求机器人具备高度的灵活性和适应性,能够像人类一样在复杂多变的环境中灵活应对各种情况。包文涛先生强调,实现这一目标需要在机器人的感知系统、决策系统和执行系统等方面进行协同创新。感知系统需要能够准确地获取环境信息,包括视觉、触觉、听觉等多种模态的信息;决策系统则需要通过先进的算法和模型,对感知到的信息进行快速分析和处理,生成合理的操作指令;执行系统则需要具备高精度、高可靠性的运动控制能力,以确保机器人的操作动作准确无误。
关于当前具身智能机器人发展现状,包文涛先生指出,经过多年的发展,具身智能机器人在感知技术、决策算法和执行机构等方面都取得了显著的进展。在感知技术方面,随着传感器技术的不断进步,机器人能够获取到更加丰富、准确的环境信息。例如,高分辨率的视觉传感器、高精度的触觉传感器等,为机器人提供了更加细腻的感知能力。在决策算法方面,深度学习、强化学习等人工智能技术的应用,使机器人能够更好地理解和处理感知到的信息,生成更加合理的操作策略。在执行机构方面,新型驱动技术和控制算法的研发,提高了机器人的运动精度和灵活性。然而,尽管取得了这些进展,具身智能机器人仍然面临许多挑战,如数据集构建的难题、多模态信息融合的复杂性、长时域任务规划的困难等。
针对具身智能机器人数据集问题,包文涛先生详细解释了其与 GPT 等语言模型数据集的不同之处,以及为什么机器人的数据集目前仍然是技术发展的瓶颈问题。与 GPT 模型主要依赖于文本数据进行训练不同,具身智能机器人需要处理的是来自多个模态的真实世界数据,包括视觉、语言、触觉等。这些数据的获取、标注和整合都面临着巨大的挑战。例如,收集机器人在不同环境和任务下的操作数据,需要耗费大量的时间和资源;同时,由于数据的多样性和复杂性,标注工作也变得异常困难。此外,如何将这些多模态数据有效地融合在一起,构建出一个具有高度代表性和适应性的数据集,也是一个亟待解决的问题。包文涛先生强调,解决这些问题需要学术界、工业界和政府部门的共同努力,加强合作与交流,共同推动具身智能机器人技术的发展。
PNP机器人
PNP机器人呈现的易用性小朋友加入操作
PNP机器人协具身智能解决方案,在FAIR plus 2025亮相,通过具身智能机器人操作展出、多模态视触觉方案演示、具身技术论坛演讲、东方卫视采访等,展示了PNP机器人在具身智能领域进展,为使用单臂/双臂等具身操作方向提供了新思路。同时PNP 机器人向公众展示了其在具身智能领域的深厚技术实力和对行业发展的深刻洞察。同时,也让更多的人了解到具身智能机器人这一前沿技术的巨大潜力和广阔应用前景,为推动机器人技术的普及和发展做出了积极贡献。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











