






多传感器融合科研神器!HandBot-S1!硬件算力开源、数据开源、支持开源算法运行!支持二次开发!
www.3dcver.com 3D视觉工坊 2025年05月12日 07:03 江苏
HandBot-S1是一款三维空间扫描仪,集成了3D激光雷达、双目相机、IMU、算力模块、通讯模块、电池等,并提供标定好的内外参数,免去用户硬件组装、配置、标定等麻烦,通过连接网络即可开始各种应用。HandBot-S1可用于数据采集、环境重建、机器人导航等应用。
,时长01:33
扫码查看手持扫描仪HandBot-S1产品详情
手持模式
手持模式下,可以进行数据采集、环境重建。产品外观展示:

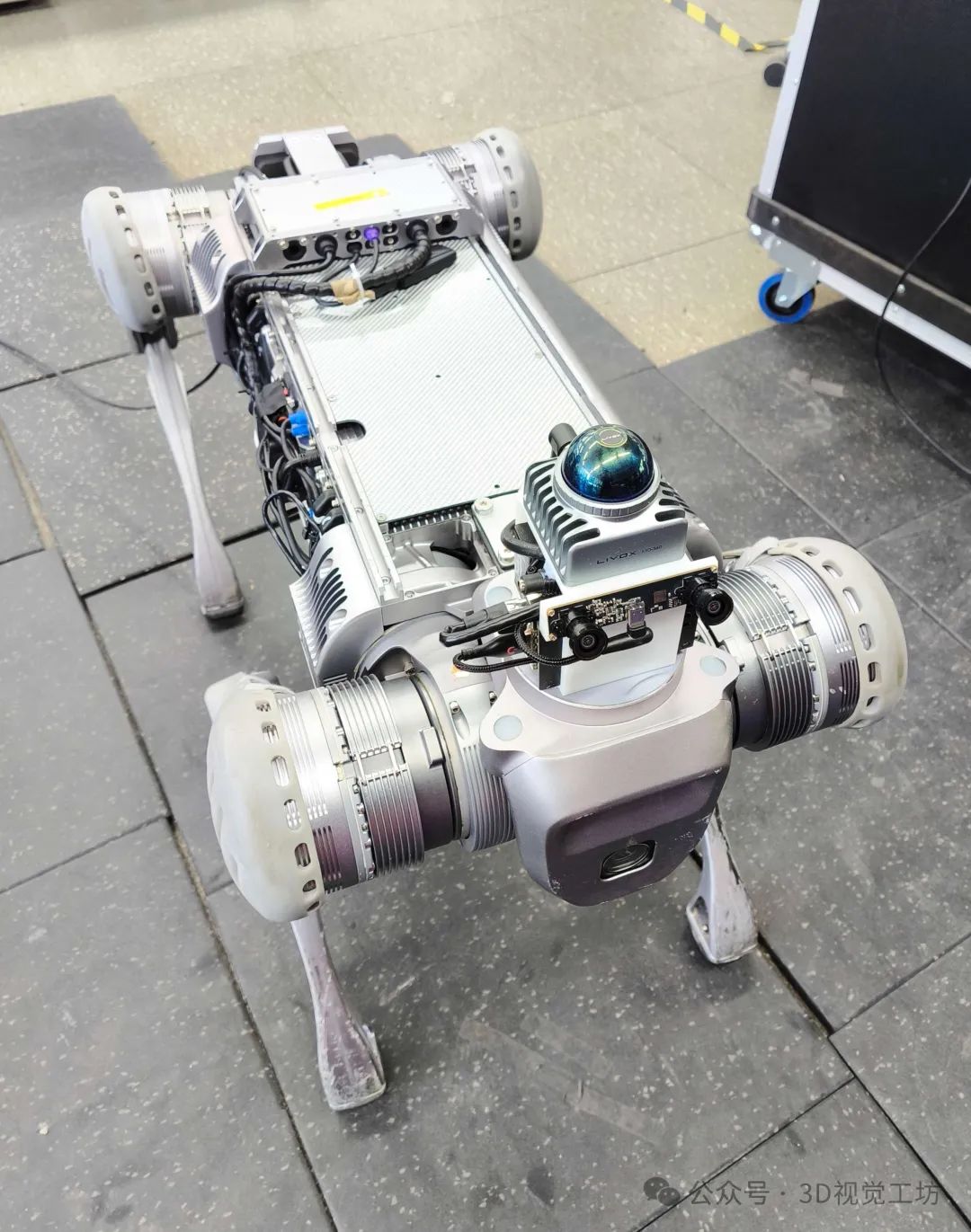
负载模式
扫描仪主体和手持底座通过4颗螺丝连接,去掉手持底座后,扫描仪主体可直接搭载到轮式机器人、足式机器人、无人机等多种机器人平台,扫描仪的SLAM算法使得机器人具备建图和定位的能力,仅需要连接一根网线即可获取扫描仪的传感器数据、实时位姿数据、地图数据。实际效果如下:



另外使用者可以将路径规划算法部署到扫描仪的算力主板上,使得机器人具备完整的定位导航的功能。
产品特色
HandBot-S1是一款支持开源算法运行的三维空间扫描仪,包括:硬件算力开源、数据开源。使用者可以基于HandBot-S1进行算法研究、二次开发、以及各种扩展应用。
算力开源
HandBot-S1采用RK3588算力芯片,拥有8核2.4Ghz的CPU,6TOPs的NPU,16G+128G内存,已配置好Ubuntu20.04、ROS1、ROS2开发环境。使用者可以ssh登录,或者连接键盘鼠标显示器,进行算法测试和二次开发。
数据开源
HandBot-S1可以发布ROS1或ROS2的topic,使用者可以获取所有传感器的原始数据。
支持开源算法运行
HandBot-S1可以运行激光SLAM、视觉SLAM、激光视觉融合SLAM等各种开源算法,目前提供的适配算法如下:激光SLAM开源代码:
-
A-LOAM
-
F-LOAM
-
LeGo-LOAM
-
LIO-SAM
-
LOAM-Livox
-
KISS-ICP
-
FAST-LIO2
-
Faster-LIO
视觉SLAM开源代码:
-
ORB-SLAM3
-
VINS-Mono
-
VINS-Fusion
激光视觉融合SLAM开源代码:
-
LVI-SAM
-
FAST-LIVO
其他开源的SLAM算法也可以很方便的运行在该设备上,使用者可以自行适配和测试。
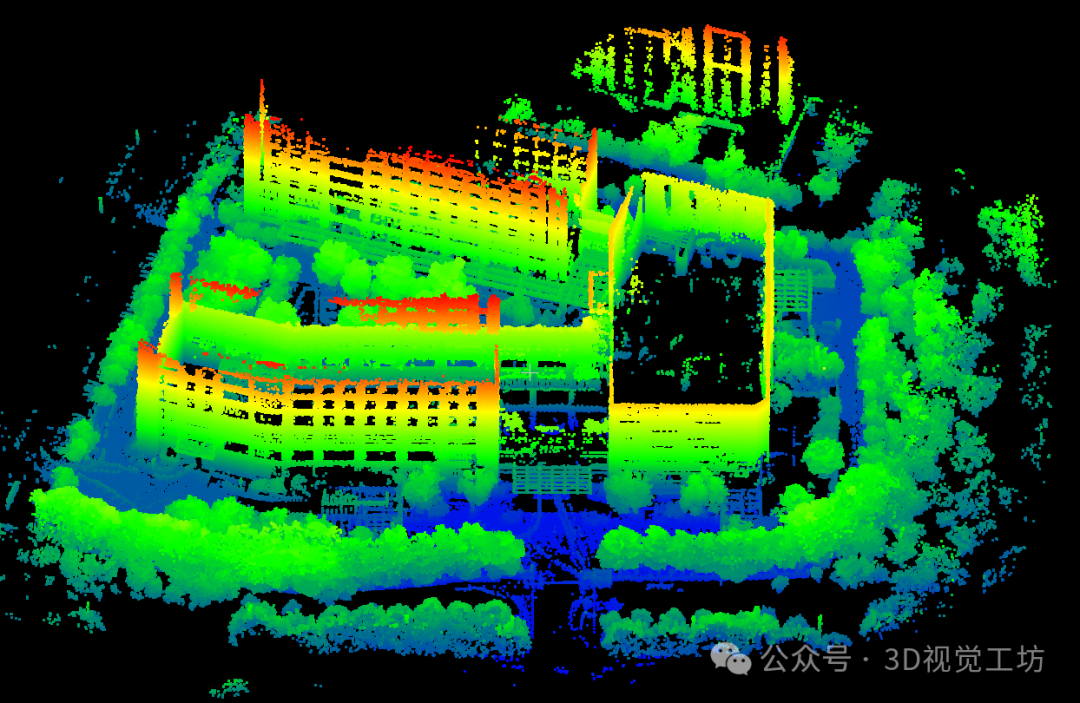
此外,HandBot-S1内置SLAM算法,具备实时建图、保存地图、基于地图定位的功能。每个功能已经封装成脚本,使用者仅通过一行命令即可调用相应的功能。而且在建图或基于地图定位时,HandBot-S1会通过ros topic输出实时位姿和地图数据,使用者可以基于定位结果进行打点,或者进行机器人导航应用。
建图效果
,时长01:02
,时长00:26

硬件配置和技术参数
| 参数名称 | 指标 | 备注 |
|---|---|---|
| 激光雷达范围 | 40m@10%反射率,70m@80%反射率 | mid360 |
| 激光雷达FOV | 水平360度, 垂直59度 | |
| IMU | ICM40609 | |
| 双目相机基线 | 65mm | |
| RGB相机FOV | 120度 | 单个 |
| RGB相机分辨率 | 1600x1200 | 默认输出640x480 |
| RGB相机快门 | 全局快门 | |
| 板载CPU | 8核心@2.4Ghz | RK3588 |
| 板载GPU | Mali-G610 | |
| 板载NPU | 6TOPS | |
| 板载内存 | 16G LPDDR5 | |
| 板载硬盘 | 128G emmc | |
| 续航时间 | 录制数据4h;实时建图3h | |
| 电池容量 | 6000 mAh | 12v |
| 充电器 | 12V-2A | |
| 最大建图范围 | 5百万平 | |
| 实时保存地图 | 支持 | |
| 基于地图定位 | 支持 | |
| 实时位姿输出 | 支持 | |
| 重复定位精度 | 2cm | 和环境相关 |
HandBot-S1套件内容
-
硬件模块
-
激光-视觉-IMU-GPS融合课程
-
使用教程
本套手持扫描仪提供详细的使用教程,方便使用者进行数据采集、算法测试、实时建图、保存地图、基于地图定位、可视化等功能的使用。并且提供教程进行硬件和算力的使用,方便使用者进行二次开发。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











