







 本文介绍了高精度地图在自动驾驶中的重要性以及导航标识识别的技术演进。高精度地图包含丰富的驾驶辅助信息,精度可达厘米级,有助于车辆定位、感知和规划。地面标识识别是高精地图的关键,面临种类繁多、磨损遮挡等挑战。文章探讨了传统方法和深度学习在地面标识识别中的应用,包括R-FCN、级联检测、分割精修和3D点云识别等,展示了技术如何提升识别的精确性和鲁棒性。
本文介绍了高精度地图在自动驾驶中的重要性以及导航标识识别的技术演进。高精度地图包含丰富的驾驶辅助信息,精度可达厘米级,有助于车辆定位、感知和规划。地面标识识别是高精地图的关键,面临种类繁多、磨损遮挡等挑战。文章探讨了传统方法和深度学习在地面标识识别中的应用,包括R-FCN、级联检测、分割精修和3D点云识别等,展示了技术如何提升识别的精确性和鲁棒性。
高精地图中导航标识识别
思路
主要介绍高精地图导航标识识别上的技术演进,这些技术手段在不同时期服务了高精地图产线需求。
- 高精地图介绍
当你开车导航的时候,导航地图会向我们推荐一条或几条路线,有些地图甚至会显示这些路线是否拥堵,以及每条路线要花费的时间。获得这些信息后,你必须根据地图提供的信息决定是否直行和转弯,并对周围的驾驶环境进行评估,可能还要考虑交通管制:信号灯、限速标志等。
自动驾驶汽车缺乏人类驾驶员固有的视觉和逻辑能力。比如:你可以根据看到的东西和 GPS 提供的信息确定你自己的位置;还能轻松准确地识别障碍物、其他车辆、行人和交通信号灯。但这对无人驾驶汽车来说是一项非常艰巨的任务。正因如此,高精度地图是当前自动驾驶汽车技术不可或缺的一部分。
高精度地图包含大量的驾驶辅助信息。最重要的信息是依托道路网的精确三维表征。例如交叉路口局和路标位置。
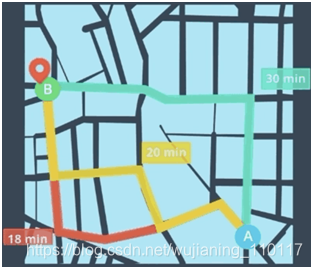
图1. 高精地图

图2. 交叉路口
高精地图还包含很多语义信息。地图上可能会报告通信交通灯上不同颜色的含义,它可能指示道路的速度限制,以及左转车道开始的位置。
高精地图最重要的特征之一是精度,高精度地图能使车辆达到厘米级的精度这对确保无人驾驶汽车的安全至关重要。手机上的导航地图只能达到米级的精度,想象一下一两米有多远:如果车辆偏离一两米,可能会阻碍交通及人行道,并且可能发生触碰。
高精度地图是自动驾驶平台的核心,无人驾驶汽车的许多其他模块都依赖于高精度地图。我们要在高精度地图上进行定位,这就意味着我们需要弄清楚我们在地图上的位置。
我们可以将定位与拼图进行比较。如果我同时为你提供地图和地图上的一小块,我们并不能在地图上快速找到这一小块的确切位置,但无人驾驶汽车必须迅速确定以了解自己在地图上的确切位置。
首先,车辆会寻找地标。我们可以使用从各类传感器收集的数据,如摄像机图像数据、以及激光雷达手机的三维点云数据来查找地标。车辆将其收集的数据与其高精度地图上已知的地标进行比较。这一匹配过程需要预处理、坐标转换和数据融合的复杂过程。
预处理消除了不准确或质量差的数据,坐标变换将来自不同视角的数据转换为统一的坐标系;借助数据融合,可将来自各种车辆和传感器的数据合并。从而精确定位自己的所处的位置。
一旦无人驾驶汽车高度精确的定位了自身的位置,定位任务也就完成了。整个过程取决于地图,正因如此,车辆需要高精地图以便知道它处于什么位置。
同时,地图可帮助传感器缩小检测范围。例如,高精度地图可能会告知我们在特定位置寻找停车标志,传感器就可以集中在该位置检测停车标志,这被称为感兴趣区域或 ROI。ROI 可以帮助我们提高检测精确度和速度,并节约计算资源。
正如定位和感知软件依赖于高精度地图那样,规划软件也是如此。高精度地图可以帮助车辆找到合适的行车空间,还可以帮助规划器确定不同的路线选择,并帮助软件确定道路上其他车辆在将来的位置。

图3. 交通信号灯
例如,高精度地图可帮助车辆识别车道的确切中心线,这样车辆可以尽可能地靠近中心行驶,在具有低速限制、人行横道或减速带的区域,高精度地图能让无人驾驶汽车提前查看并预先减速。更重要的是,如果前方有障碍物,车辆可能需要变道,高精度地图可以帮助车辆缩小选择范围,以便选择最佳方案。
无人驾驶汽车可以使用高精度地图来帮助感知。人有眼睛和耳朵,但都有距离限制,我们无法看到或听到太远的事物,无人驾驶汽车的传感器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2459
2459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









