







转载自:https://blog.csdn.net/weixin_42646103/article/details/115678880?spm=1001.2014.3001.5501
【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3
分类专栏: 无人机 学习分享笔记 文章标签: linux 无人机 SLAM 自主导航
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/weixin_42646103/article/details/115678880
35 篇文章 0 订阅
订阅专栏
D435i相机在前一章节内容已有提及。
一、环境配置与相机参数修正
相关内容参见之前的文章,本文测试的相机配置如下:
二、参看相机发布话题
2.1 直接获取
D435i相机为Intel realsense的产品,其提供的ORS功能包有相关的launch启动文件,可以从对应相机类型的launch中获知话题名。
2.2 间接获取
编译 Intel realsense功能包后,执行对应的launch文件,通过:
rostopic list
获取所有发布的话题,确定相机话题。
三、修改ORB-SLAM3的订阅话题
在ORB-SLAM3路径下:
catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src
ganahe@ganahe-Nitro-AN515-51:~/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src$ tree
.
├—— AR
│ ├—— ros_mono_ar.cc
│ ├—— ViewerAR.cc
│ └—— ViewerAR.h
├—— ros_mono.cc
├—— ros_mono_inertial.cc
├—— ros_rgbd.cc
├—— ros_stereo.cc
└—— ros_stereo_inertial.cc
选择对应更改的文件,此处即对应相机的种类:
| 文件 | 说明 | 备注 |
|---|---|---|
| AR | AR体感相机文件目录 | 暂时用不到,忽略 |
| ros_mono.cc | 单目相机 | - |
| ros_mono_inertial.cc | 带有IMU的单目相机 | - |
| ros_rgbd.cc | RGB-D深度相机 | 一般有自带IMU,如D435i |
| ros_stereo.cc | 双目相机 | - |
| ros_stereo_inertial.cc | 双目IMU相机 | - |
本文以Interl realsense D435i作视觉传感器数据来源,故编辑ros_rgbd.cc ,将话题订阅改为:
//注释原代码
// message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 100);
// message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 100);
//更改话题订阅
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 100);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth/image_rect_raw", 100);
根据相机参数文件发布的话题来修改即可。
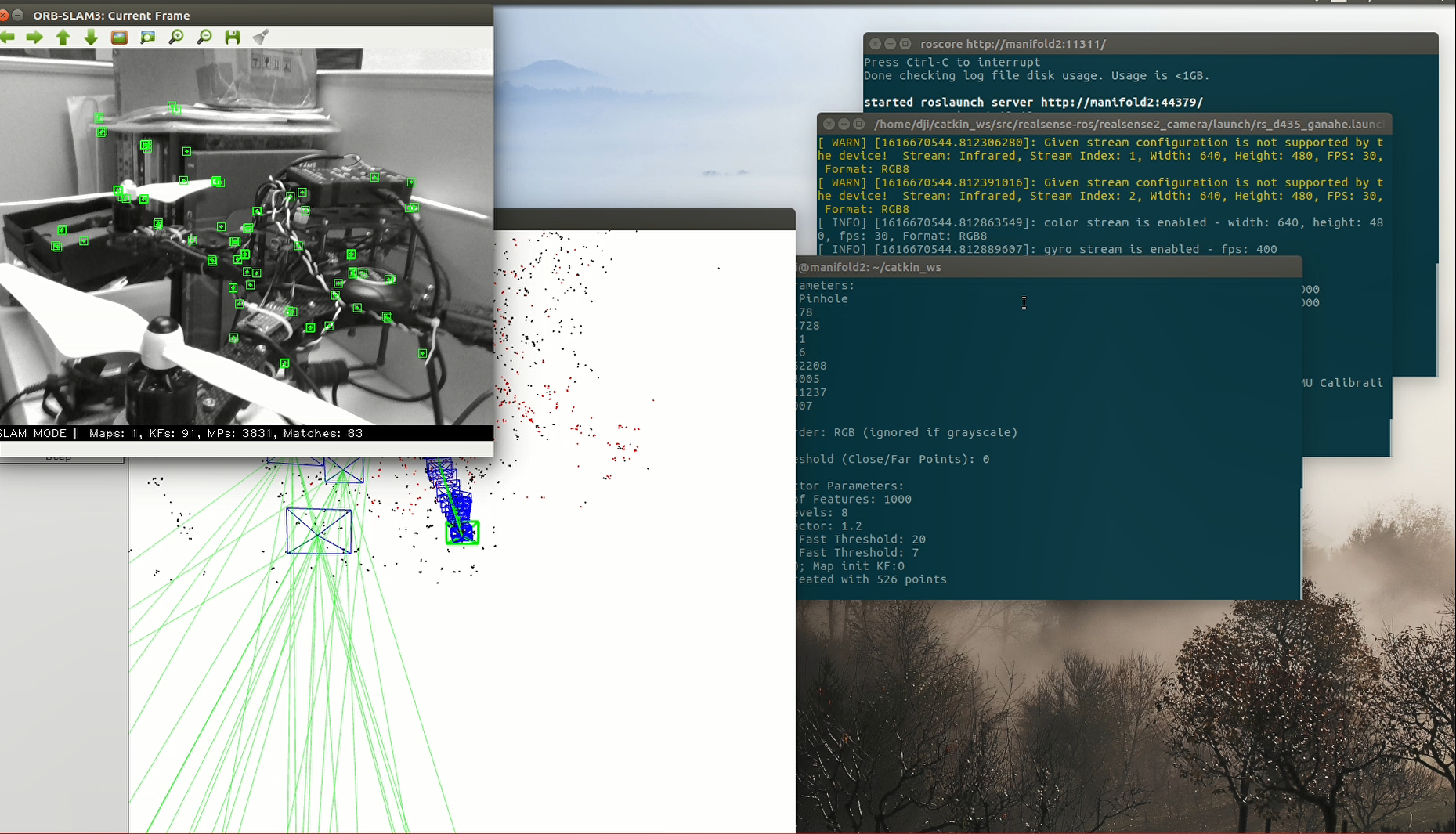
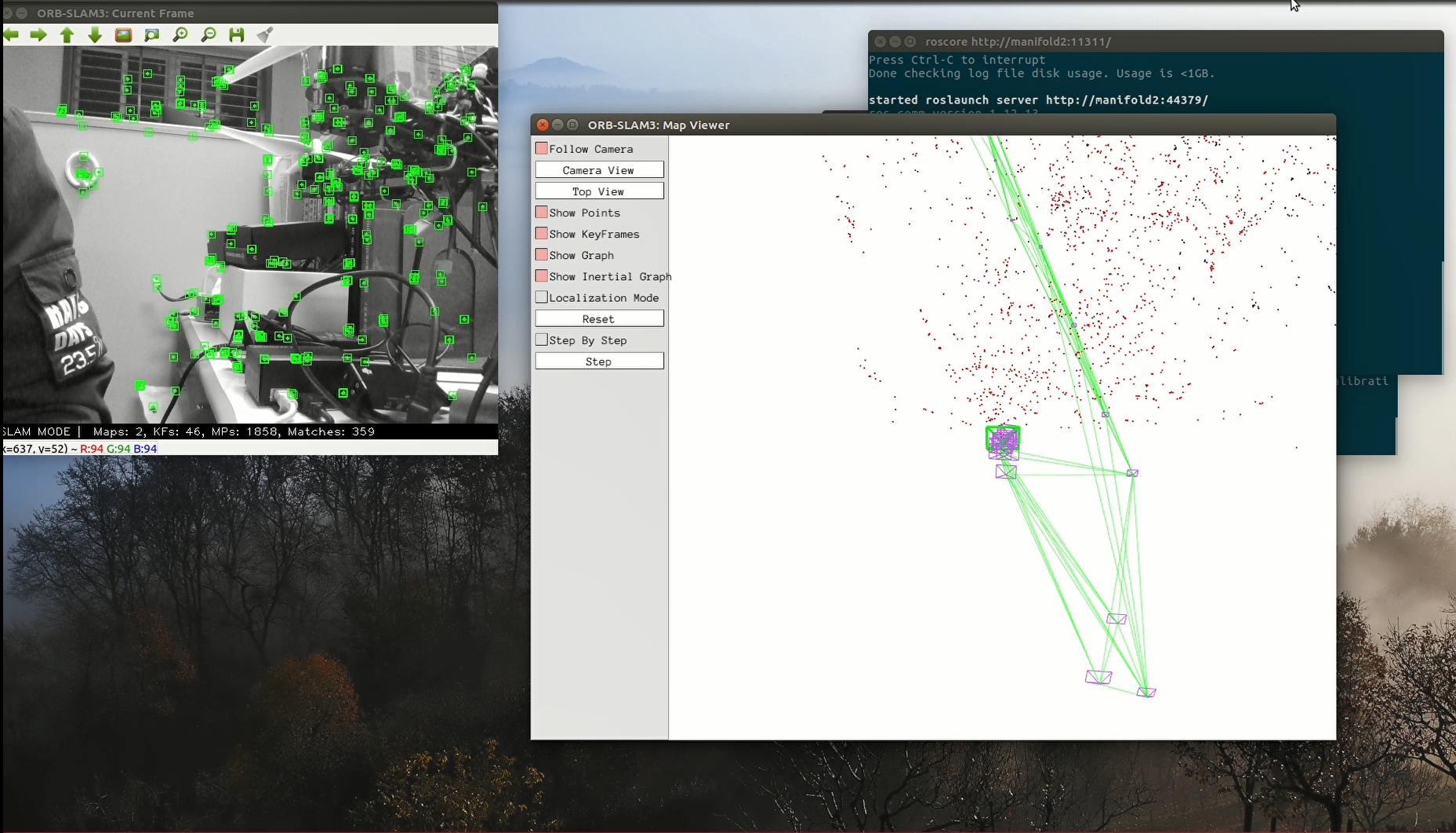
三、运行ORB-SLAM3
运行ORB-SLAM3需要如下:
- 修改的相机订阅话题:
xxx.cc文件 - 相机参数文件:
/ORB_SLAM3/Examples/ROS/ORB_SLAM3/xxx.yaml - 启动文件:
/realsense2_camera/launch/*.launch
运行步骤如下:
3.1 开启相机
roslaunch realsense2_camera rs_d435i.launch
3.2 启动ORB-SLAM3
cd ~/catkin_ws/
# 双目相机
rosrun ORB_SLAM3 ORBD /home/ganahe/catkin_ws/src/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/ganahe/catkin_ws/src/ORB_SLAM3/Examples/ROS/RGB-D.yaml
原文链接:https://dgzc.ganahe.top/ganahe/2021/wrjzzdhsirdrxjsx.html

















 2171
2171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









