







 超级会员免费看
超级会员免费看
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!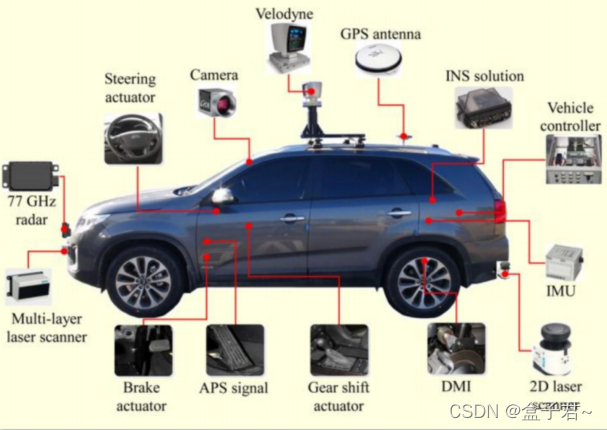
机器人导航系统架构及业务模块组合策略的相关博客专栏:
https://blog.csdn.net/qq_35635374/article/details/138202210
本文先对导航系统架构及业务模块组合策略导读做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、嵌入式硬件系统架构
【开发系统平台架构】通讯方式及组件选型方向
介绍常见的机器人嵌入式硬件系统架构,包括传感器系统、微控制器系统、处理器系统、通讯硬件系统等等。此外还介绍了各系统常用硬件的选型及方案
https://blog.csdn.net/qq_35635374/article/details/121275051
https://blog.csdn.net/qq_35635374/article/details/122294250
导航机器人硬件配置及其常用功能
介绍自主导航机器人硬件配置及其常用功能,包括碰撞杆和超声波传感器测距、红外,结构光传感器测距、编码器odom传感器、imu传感器、uwb,gnss(gps,rtk),千寻、视觉及深度相机传感器、单线激光雷达与视觉深度测距、多线激光雷达深度测距等等
https://blog.csdn.net/qq_35635374/article/details/131505403
二、嵌入式软件系统组件架构
理解嵌入式软件系统组件架构,包括了解系统通用SDK组件支持(简单理解就是一个底层SDK系统能提供到什么工具给你),常用的RTOS实时操作系统平台类型举例等等
https://blog.csdn.net/qq_35635374/article/details/121255333
【模块间通讯架构】导航系统中各个层次和模块间的数据隔离、共享与传递方法
介绍导航实时操作系统中各个层次和模块间的数据隔离、共享与传递的常用方法。包括在一个线程中通过C++(编程)语言进行传递、公共的common.h文件或.proto文件中进行传递、使用extern或者get()函数接口进行传递、线程间通讯、进程间通讯、设备之间通讯等等。
https://blog.csdn.net/qq_35635374/article/details/121368265
【模块间的通讯】数据接口及通讯代理系统架构
介绍导航实时操作系统中各个层次和模块间的数据接口及通讯代理系统架构。通讯代理可以使接口更加明确。
https://blog.csdn.net/qq_35635374/article/details/121301652
三、机器人控制系统架构
以四足机器人为例,介绍机器人的运动控制系统架构,包括控制框图及流程、控制原理等等
https://blog.csdn.net/qq_35635374/article/details/121302058
四、移动机器人&自动驾驶导航架构
【单个导航模块的设计】导航模块设计
介绍导航模块设计的方法,包括导航业务系统架构设计的原则、单线程/多线程导航模块设计、导航模块的抽象层级
业务需求层(模块功能)
模块被调API及服务接口层(对外服务)
私有数据结构接口层(私有内部数据)
私有算法层(移植相关)
模块逻辑层(模块内部处理流程)
支持模块层(其他模块支持)等等
https://blog.csdn.net/qq_35635374/article/details/121306107
常用规控算法介绍及导航案例分析
介绍常用规控算法介绍及导航案例分析
https://blog.csdn.net/qq_35635374/article/details/130969098
机器人的避障常用方案
介绍常用的机器人的避障常用工程落地方案
3D 结构光避障、单目视觉避障、双目视觉避障、激光雷达避障、3D TOF 避障、基于超声波、红外的免碰避障方式等等
https://blog.csdn.net/qq_35635374/article/details/131505505
navigation(mose_base)
介绍机器人导航mose_base功能包案例,包括move_base图例及工作流程介绍、move_base的源码解读、move_base的安装运行及调参流程。
具体分析代价地图costmap_2d功能包源码、全局规划器global_planner功能包源码、局部规划器local_planner功能包源码、重恢复行为状态recovery_behaviors功能包源码、定位amcl源码、地图服务map_server功能包等等
https://blog.csdn.net/qq_35635374/article/details/120852592
【项目理解】地图模块和路径规划模块的相互配合
介绍无人机地图模块和路径规划模块的相互调用及步骤
https://blog.csdn.net/qq_35635374/article/details/121555330
【基础导航软件架构】无人驾驶车/机器人的基本导航软件系统框架
介绍无人驾驶车/机器人的基本导航模块组成及功能,包括感知模块、规划模块、控制模块。并总结不同智能程度的机器人导航模块组成及开发方向
https://blog.csdn.net/qq_35635374/article/details/121770666
【综述篇】无人驾驶/机器人规划方向综述
介绍无人驾驶/机器人规划方向综述,包括机器人决策规划岗位的本质的认识、【mission_planning–navigation】导航任务决策规划、【path_finding】前端路径搜索、【motion_planning】后端轨迹处理、【trajectory_following】路径巡航、跟踪控制、【tuw_multi_robot】多机器人规划算法
最后介绍机器人决策规划的工程部署步骤,介绍开源的导航架构demo&&规划库
https://blog.csdn.net/qq_35635374/article/details/120926131
https://blog.csdn.net/qq_35635374/article/details/120926131
【无人驾驶导航架构】无人驾驶框架及发展
介绍无人驾驶框架及发展,包括自动驾驶发展的两种可能的路径分析、自动驾驶系统组成简介、AGV无人自动驾驶系统构架简介、载人自动驾驶车系统设计简介、自动驾驶车辆整体框架简介、传感器部分简介、自定义开发方向简介
https://blog.csdn.net/qq_35635374/article/details/121929689
五、设计模式思想
介绍架构模式设计的相关方法,包括ROS工程代码规范、工厂模式代码设计、命令设计模式、发布订阅设计模式、请求服务设计模式、单例设计模式、适配器设计模式逻辑代码重构及设计的技巧等等
https://blog.csdn.net/qq_35635374/article/details/131611947
https://blog.csdn.net/qq_35635374/article/details/132416508
六、波士顿spot机器人实现分析
主要介绍了波士顿spot机器人的发展历史、四足机器人的硬件系统及电机执行器组成包括硬件系统、关节电机执行器,机载传感器机处理器及电气连接等。概述了四足机器人规划控制、感知、定位及局部地图的相关算法方向。
https://blog.csdn.net/qq_35635374/article/details/122192024

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











