










这篇博文和下面这篇博文一起看,都是分析GPS定点的,只是我分开写了。
https://blog.csdn.net/sinat_16643223/article/details/119721862
像高翔说的GPS精度是10m级的,对视觉SLAM基本没什么用,只能说宏观上纠正一下。
确实GPS频率就10hz,但是实际飞控位置环肯定不是10hz
当然飞控姿态环依靠IMU就够了。
其实之前也见过TBUS单靠IMU就实现定点悬停。
确实牛逼的惯导是可以做到一定时间内不飘的,像有的上百万的惯导。环宇智行用过。
前几天不是还听高飞还是高翔讲过,什么贵一点惯导可以坚持30还是50分钟不飘,但是最后还是会飘。
不把这个弄清楚你去做GPS和T265的融合也没用,其实及见到的本地位置数据其实是飞控融合后的,并不是真正的GPS,那样和T265去融,相当于用了两次IMU,T265已经融合IMU一次了,这或许是不是为什么那么做T265和GPS融合的人没有用/mavros/local_position/pose的原因呢?,真正的GPS数据,我觉得可能就如高翔所说,对视觉SLAM没什么太大意义。怪不得我看到的视觉SLAM融合GPS都是在那种地图上大的轨迹上的融合,可能因为这种场景下GPS才能起到一些作用。
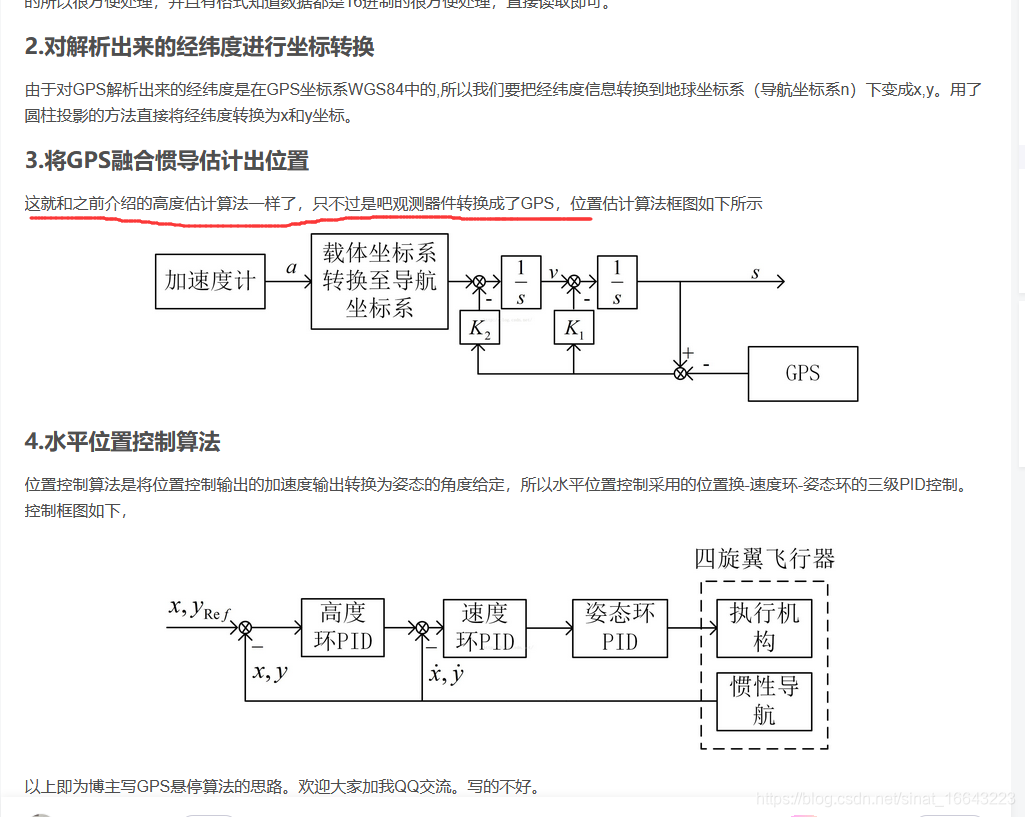
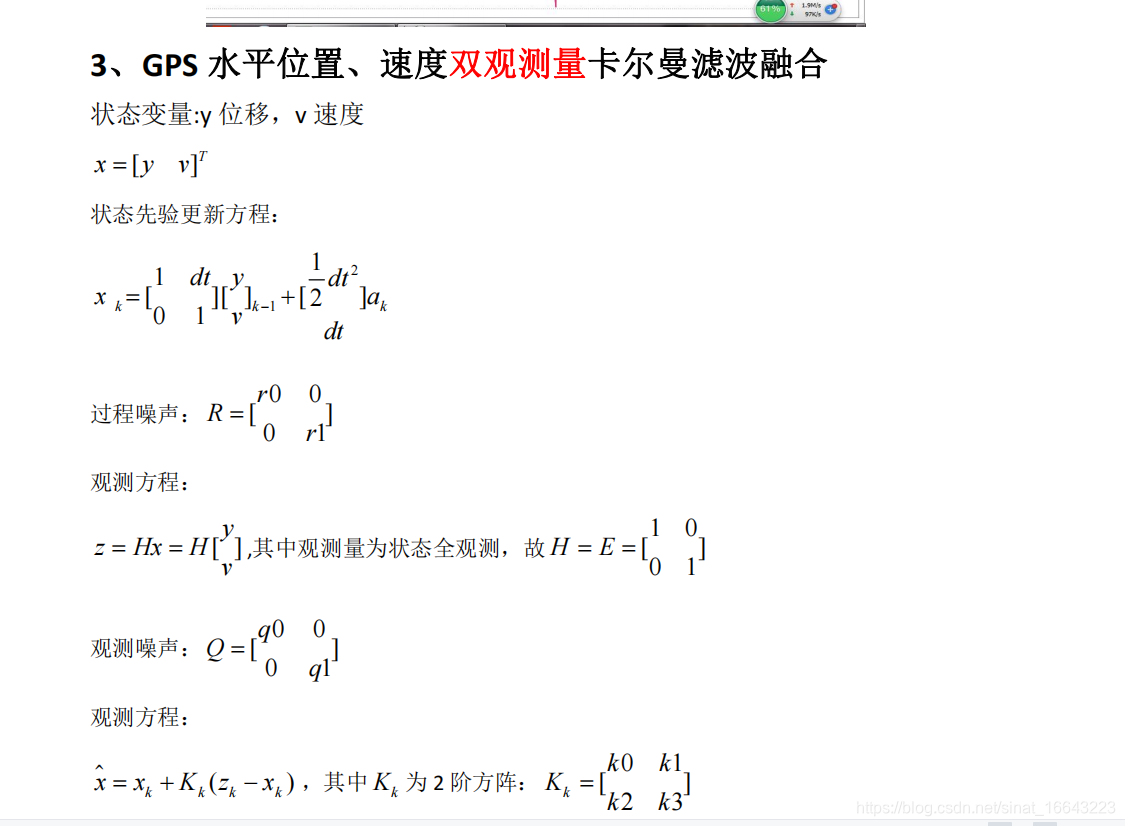
可以看到王龙写GPS水平融合IMU本质和告诉气压计融合IMU一样,他说只不过把观测期间转换成了GPS
https://blog.csdn.net/wkdwl/article/details/52203099?spm=1001.2014.3001.5501
这个人也写了些
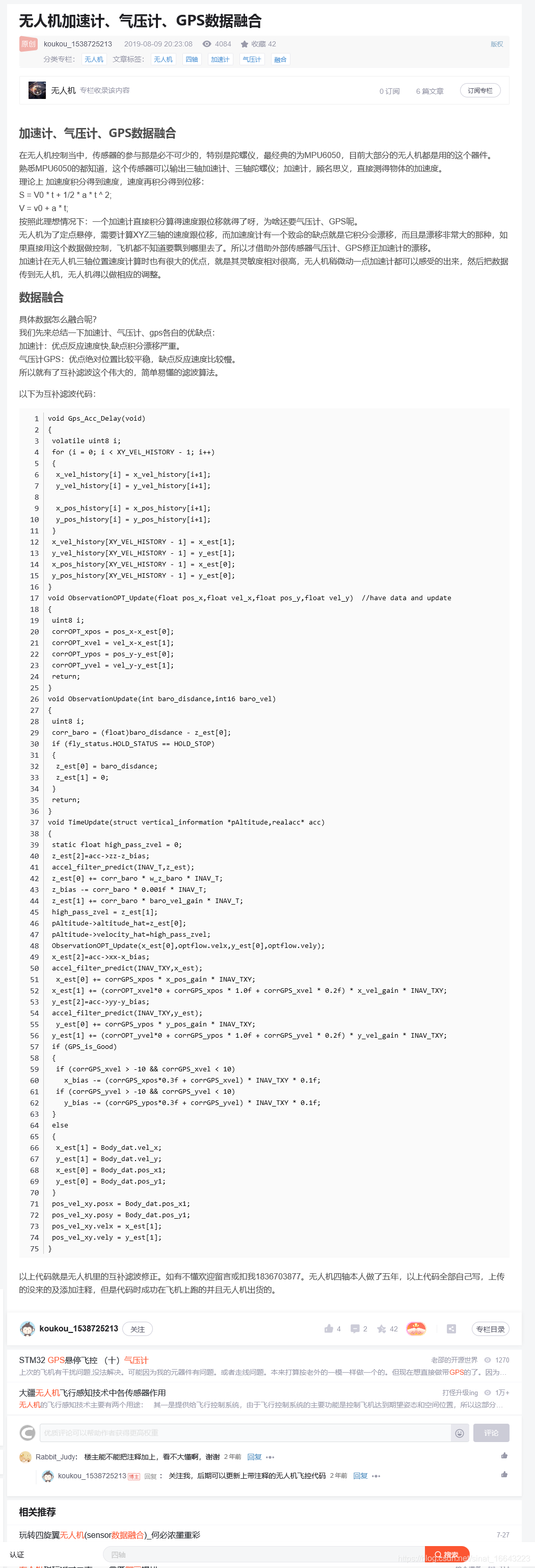
https://blog.csdn.net/xiaoxilang/article/details/80552636
《一本书看懂多旋翼无人机》P97面
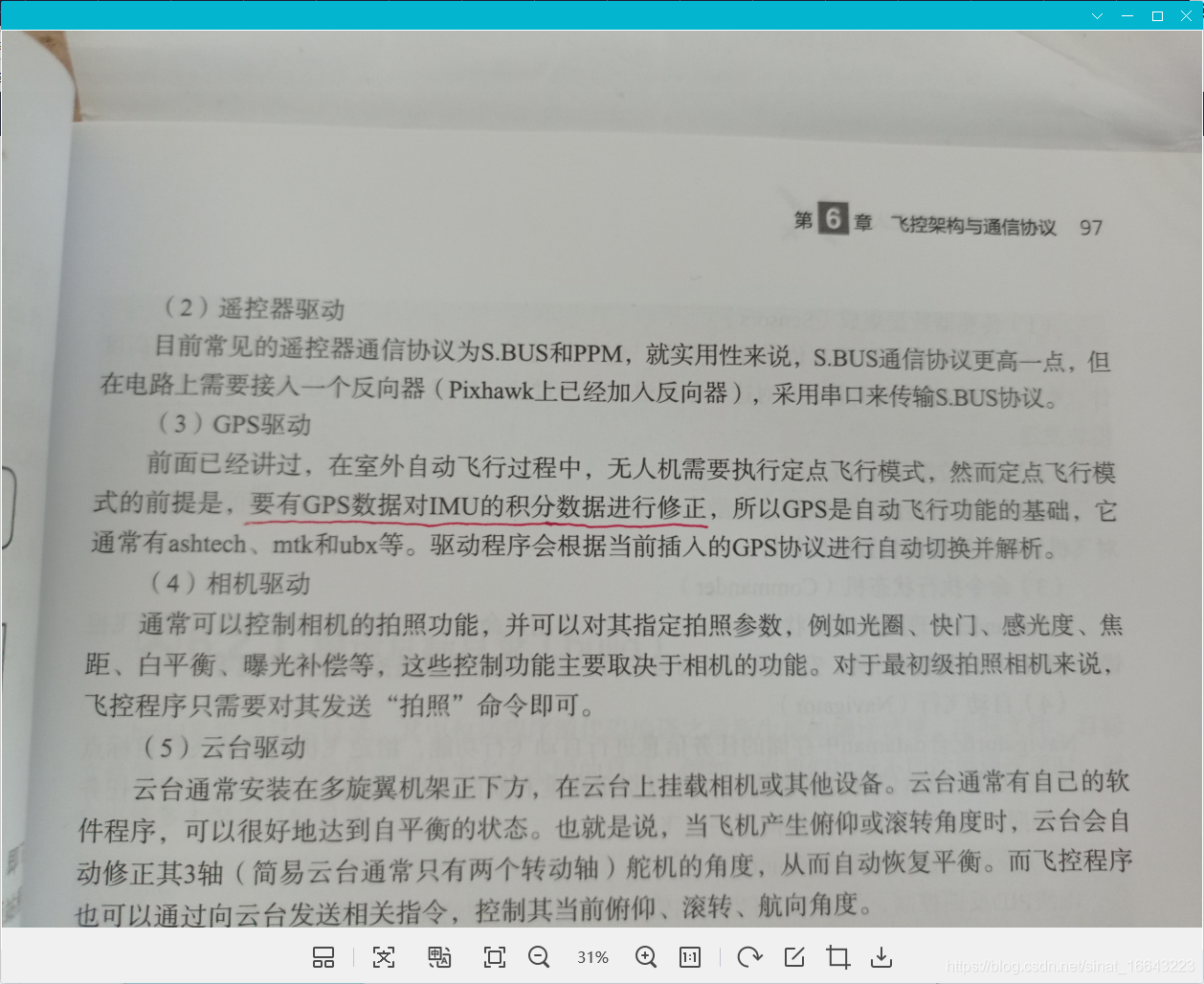
这个直接说它用的互补滤波融合IMU和GPS,气压计,而且真正用在无人机上了。看来真的就是互补滤波这么简单?或者卡尔曼滤波这么简单?
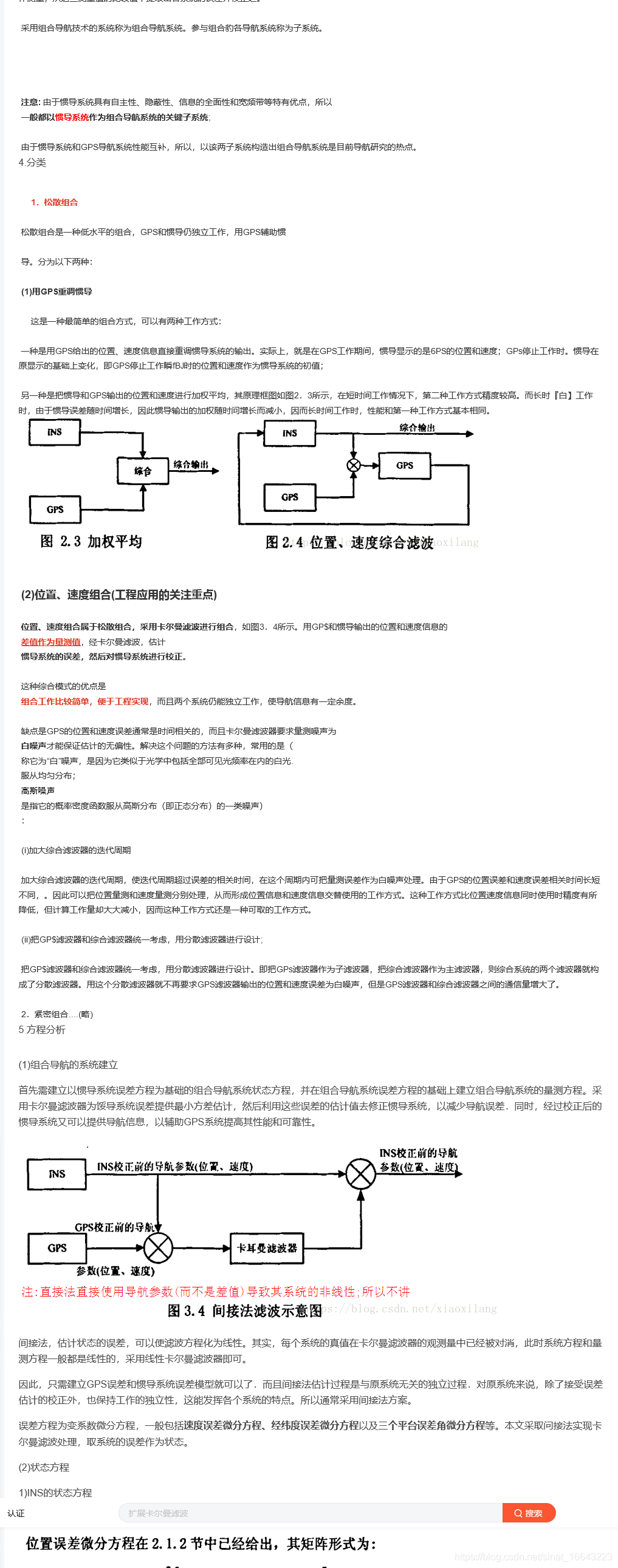
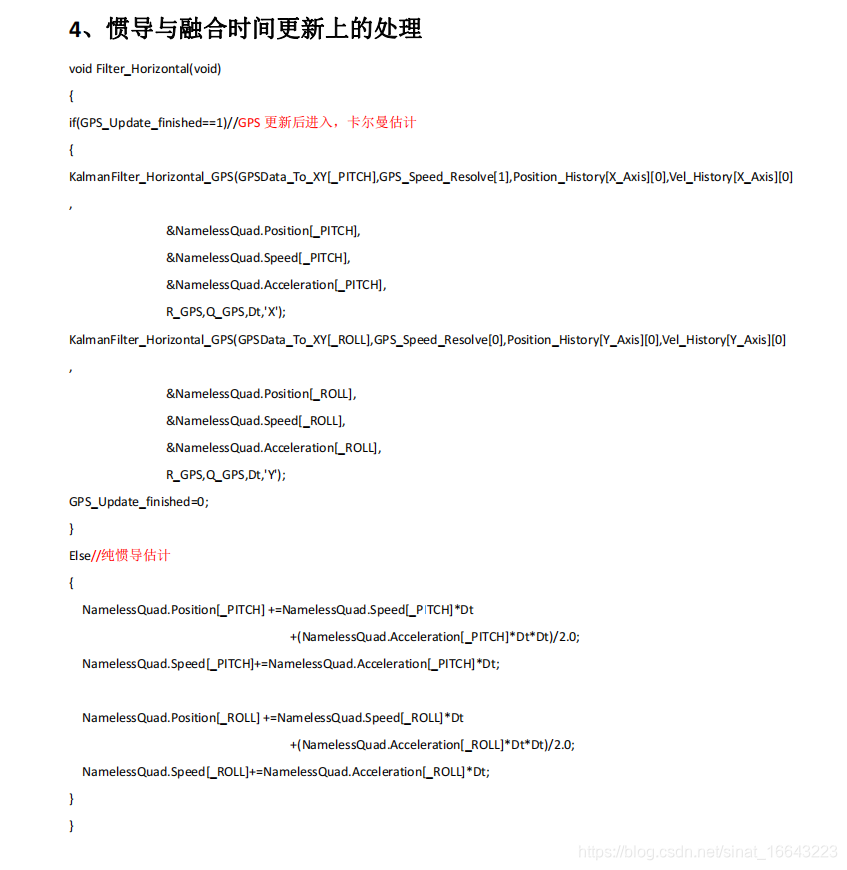
无名这篇PDF里面有详细讲

它这估计分为两部分,没有GPS的纯惯导估计,有GPS的时候进入卡尔曼滤波估计。这样就讲得更具体些了,这样也好理解些了!!!实际程序上是这么实现的,GPS起到一个修正的作用?
https://zhuanlan.zhihu.com/p/60207971
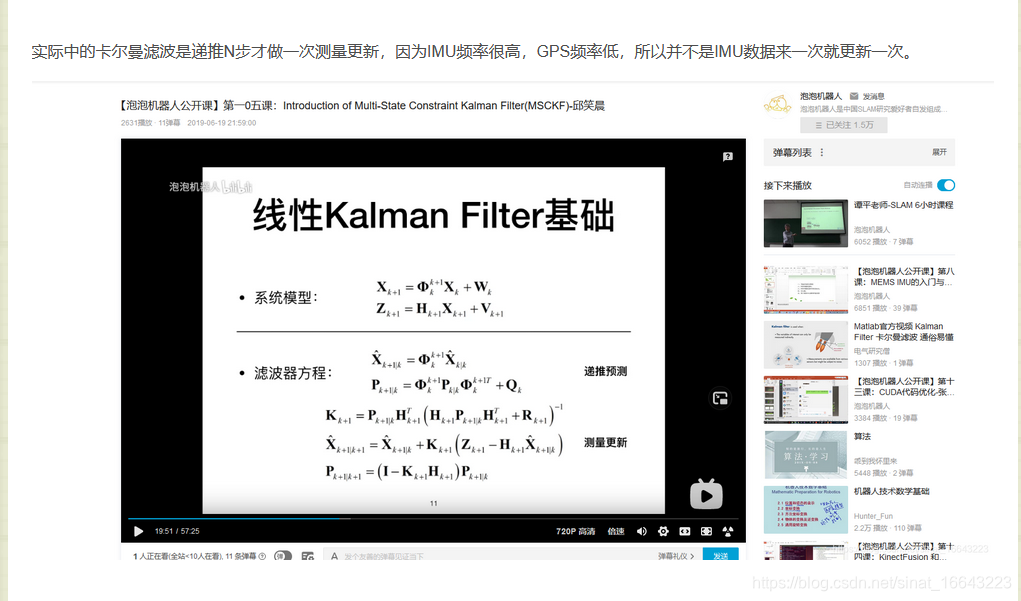
一个叫预测阶段,一个叫更新阶段,似乎卡尔曼滤波就是这样子的啊

https://blog.csdn.net/sinat_16643223/article/details/118873863
我需要明确GPS的随机模型,飘到底多飘,误差大到底多大? 这样我再仿真中就可以解决,不用大量跑到室外去解决,而且只能定性解决,数学建模之后我们可以定量解决是不是。
这方面的工作应该是挺多的

建模能够更为彻底地解决问题,比你拿着GPS出去各种跑测强,而且也不方便出去测现在。
发现实际专门讲GPS的书还是挺多的,这方面的研究也应该比较成熟透彻了。

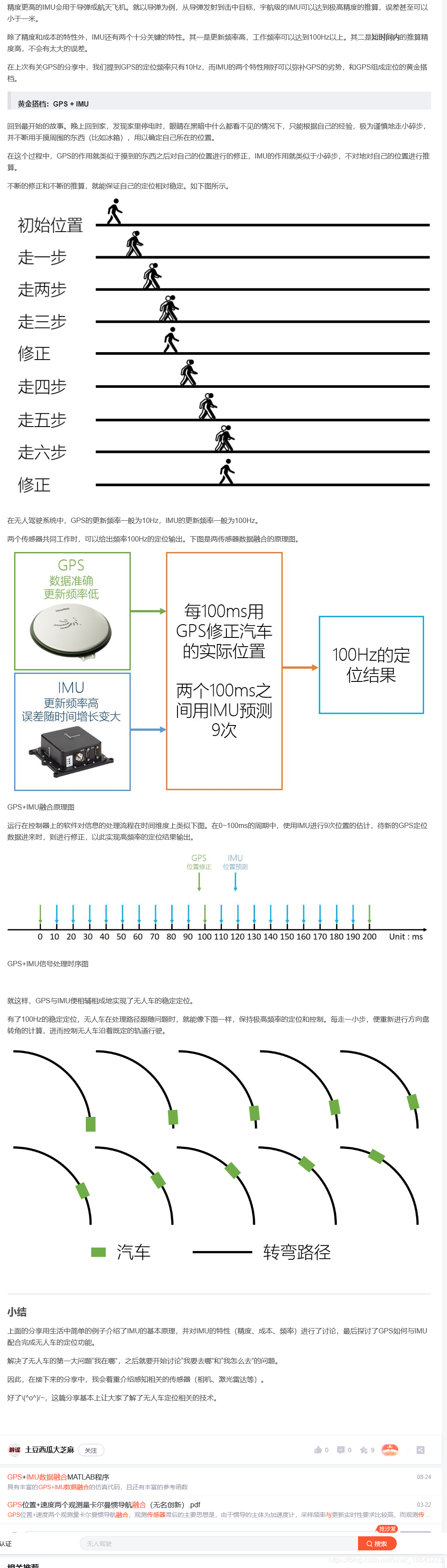
这篇文章真的是给了我很好的解答,直接使用GPS的数据,也是可以定住的
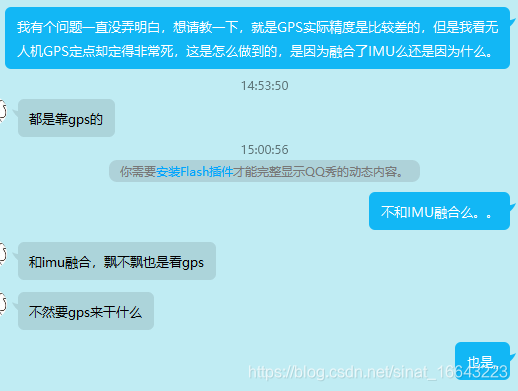
从这一点看GPS还是比较可靠的,GPS没有IMU定得住,但是IMU没有GPS定不住,所以看来主要还是靠GPS。
http://shequ.dimianzhan.com/articles/278
https://blog.csdn.net/sinat_16643223/article/details/118771602

还讲了PX4中根据GPS坐标转为本地位置坐标的代码
还说了融合会根据GPS的信号质量进行动态权重。

多方可以看出说GPS精度比较差。


















 699
699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











