







$ git clone https://github.com/Livox-SDK/Livox-SDK2.git
$ cd ./Livox-SDK2/
$ mkdir build
$ cd build
$ cmake .. && make -j
$ sudo make install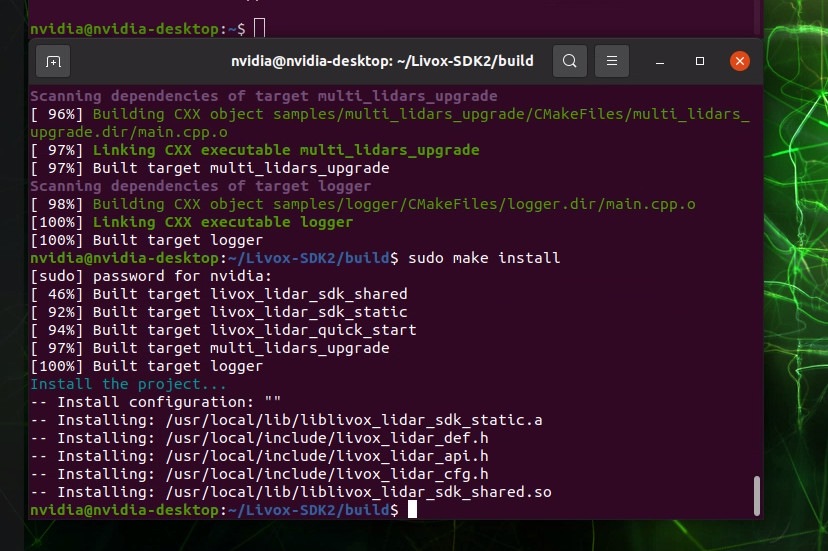
$ git clone https://github.com/Livox-SDK/livox_ros_driver2.git livox_ws2/src/livox_ros_driver2
$ cd livox_ws2/src/livox_ros_driver2
$ source /opt/ros/noetic/setup.sh
$ ./build.sh ROS1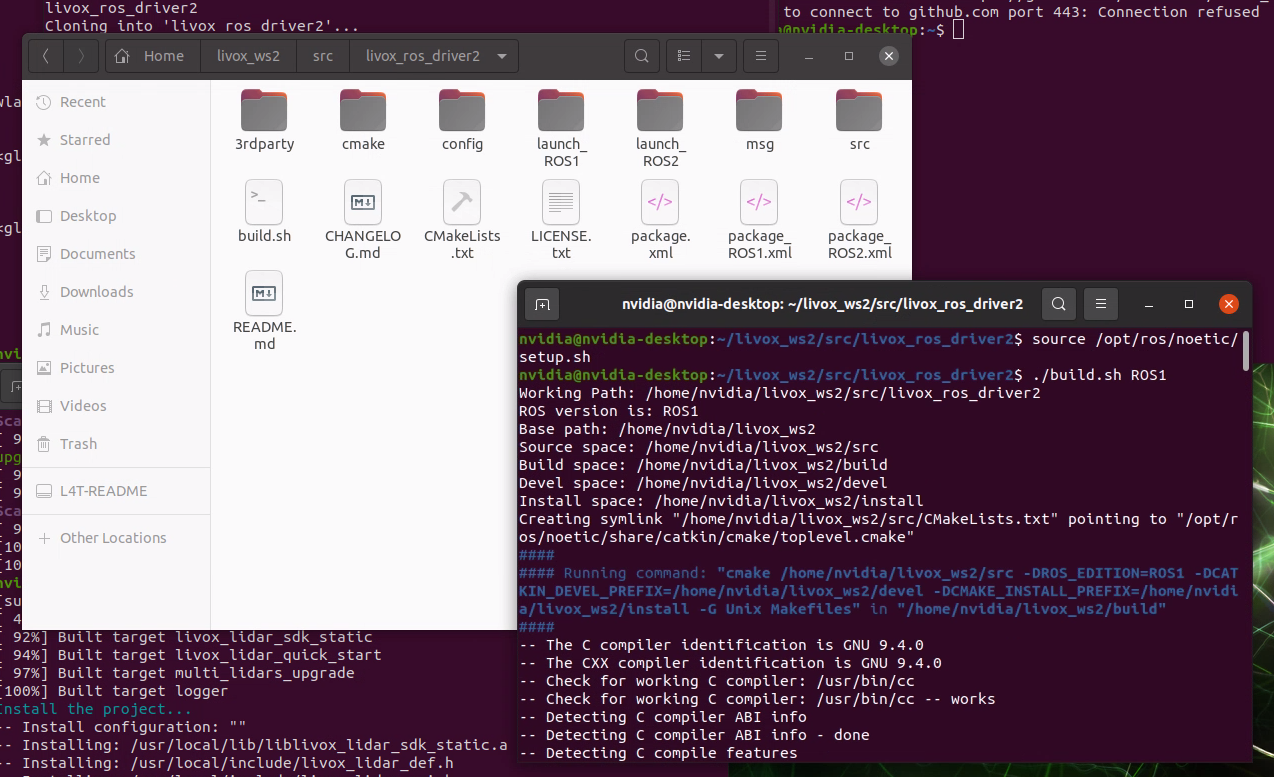

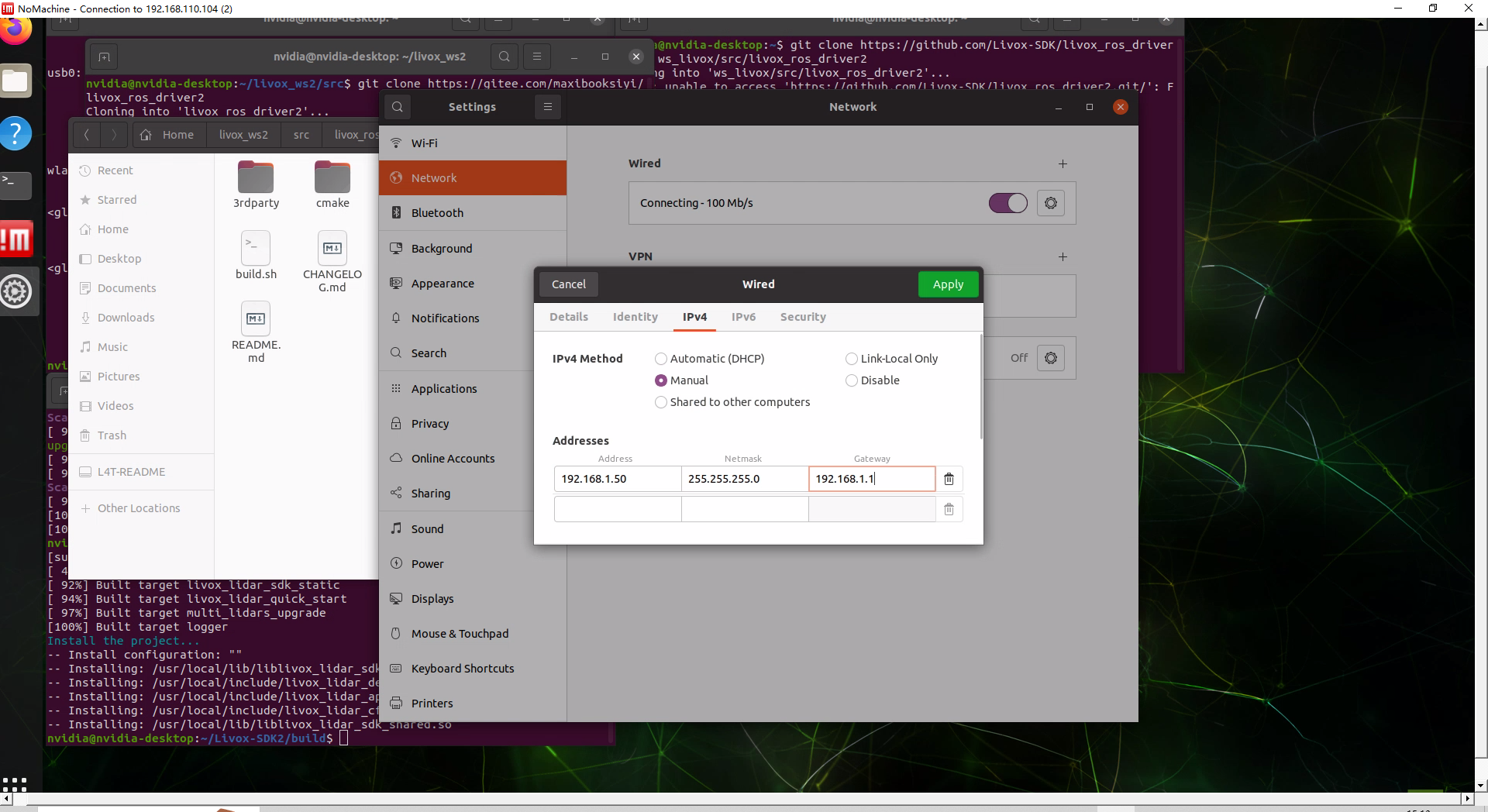
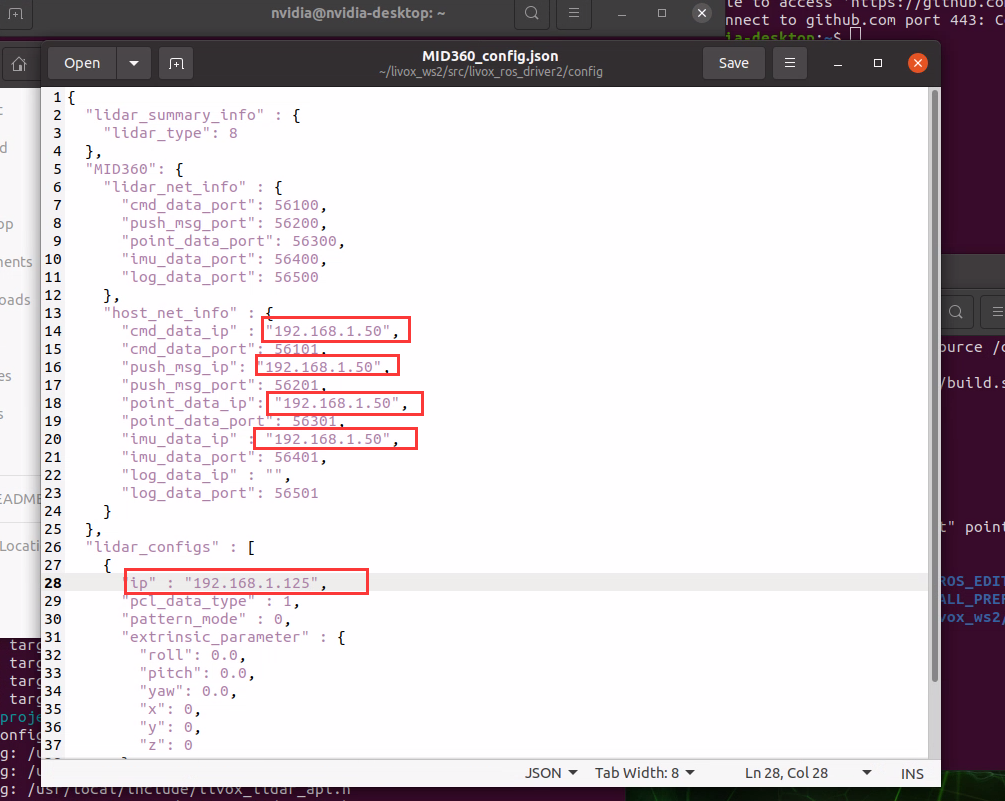
雷达的IP是192.168.1.1** 最后两位为雷达S/N码最后两位数字 mid360 iP应该是192.168.1.125
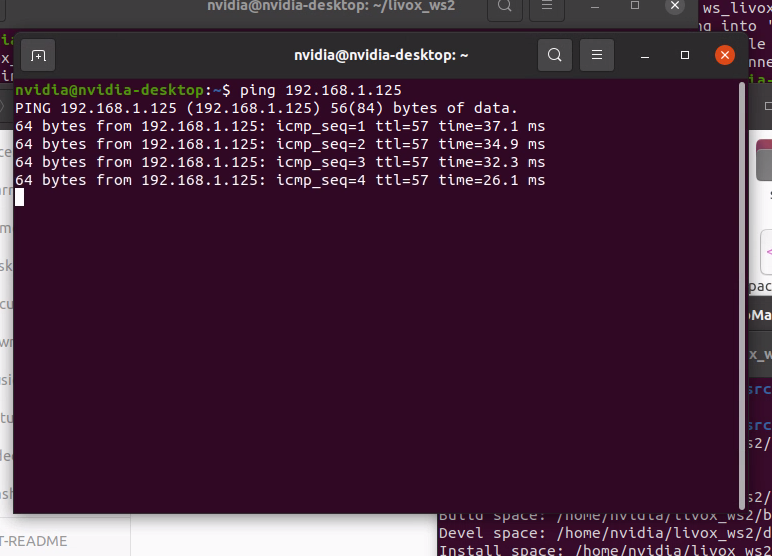
再把Ubuntu的有线IP改为静态IP,我这里改为192.168.1.50,在一个局域网内就行,可以Ping通mid360的IP就行。
ping通了!!!
改这个文件里的IP,前面几个改为Ubuntu端静态IP,最后一个改为mid360的静态IP。
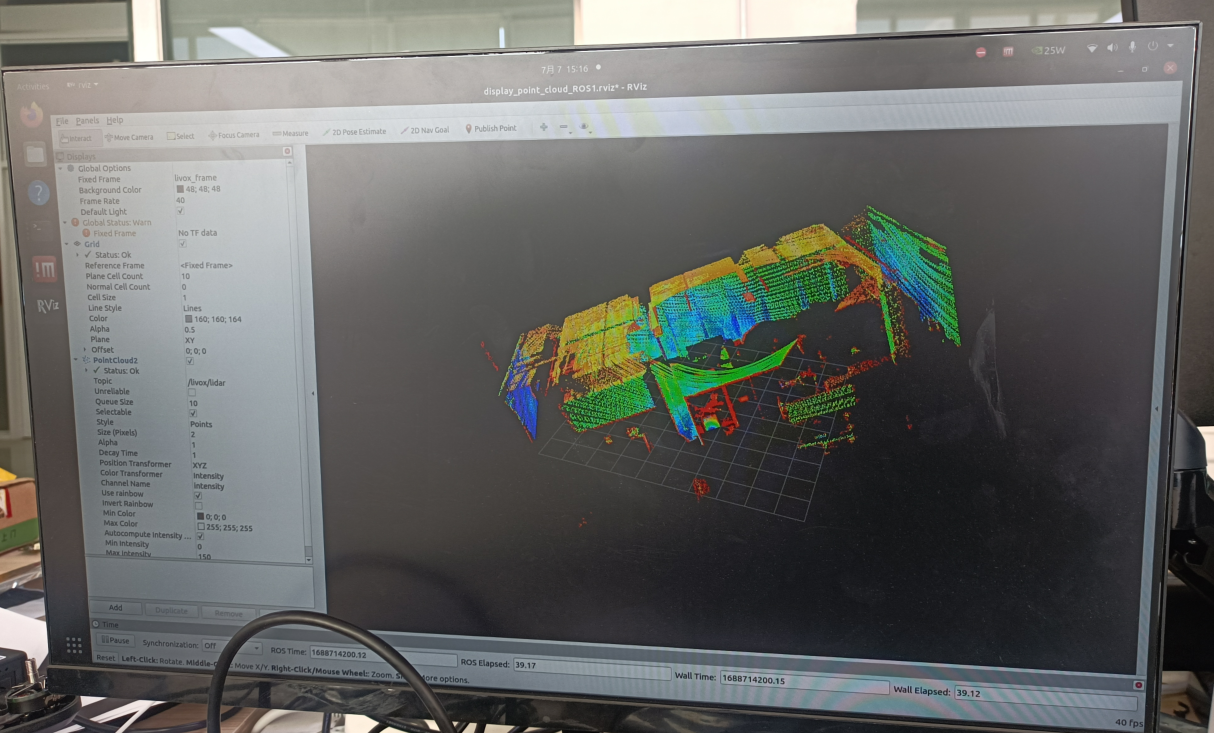
source后再起roslaunch livox_ros_driver2 rviz_MID360.launch就可以起来了
IMU话题也有值
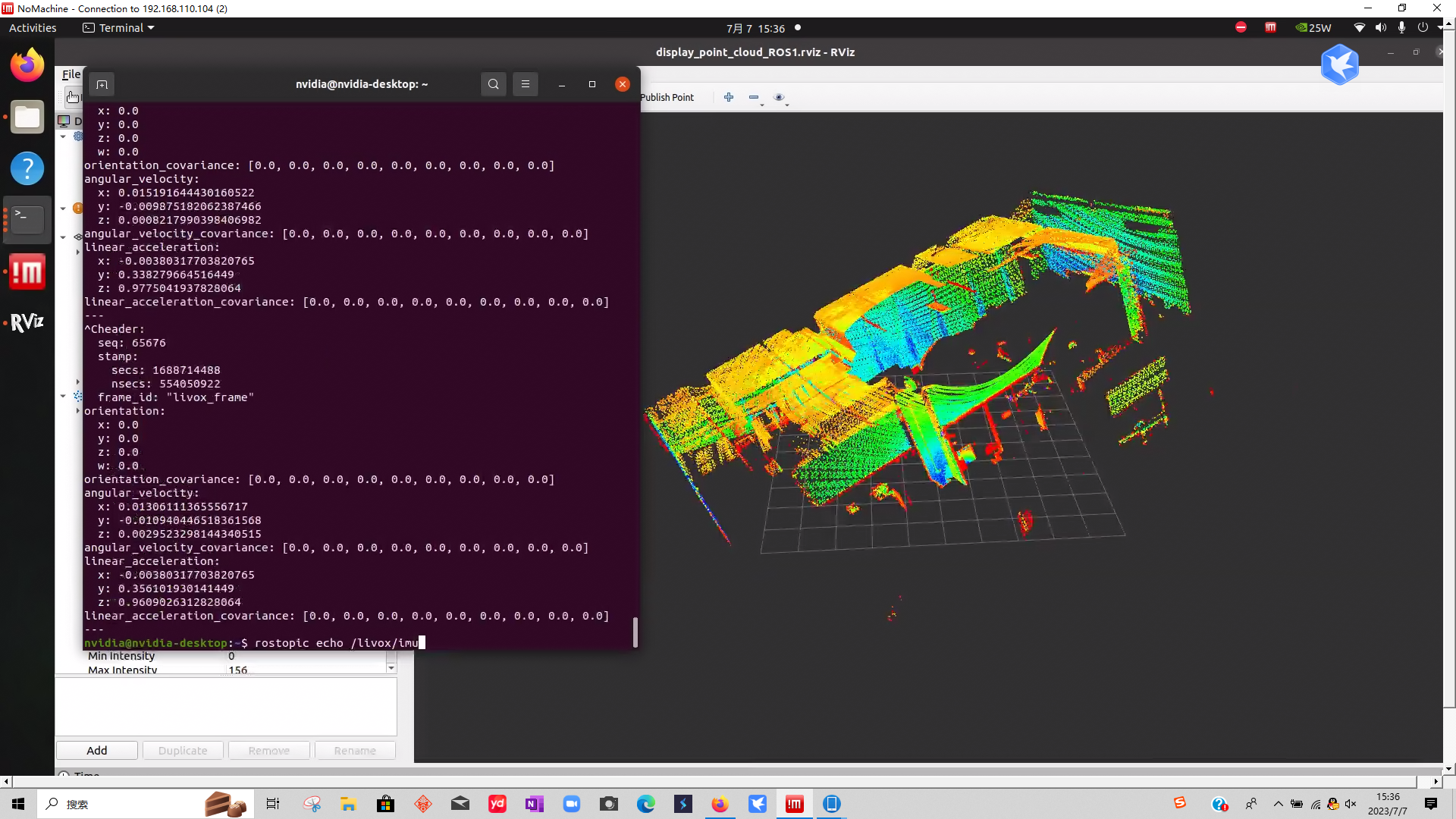
/livox/imu话题频率是200hz


















 4535
4535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











