









一些SLAM公开数据集里面用的相机就是全局快门
D435i的双目灰度是全局快门,但是RGB相机是卷帘快门
euroc数据集用的全局快门
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets

TUM数据集也强调自己没有卷帘效应
https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download

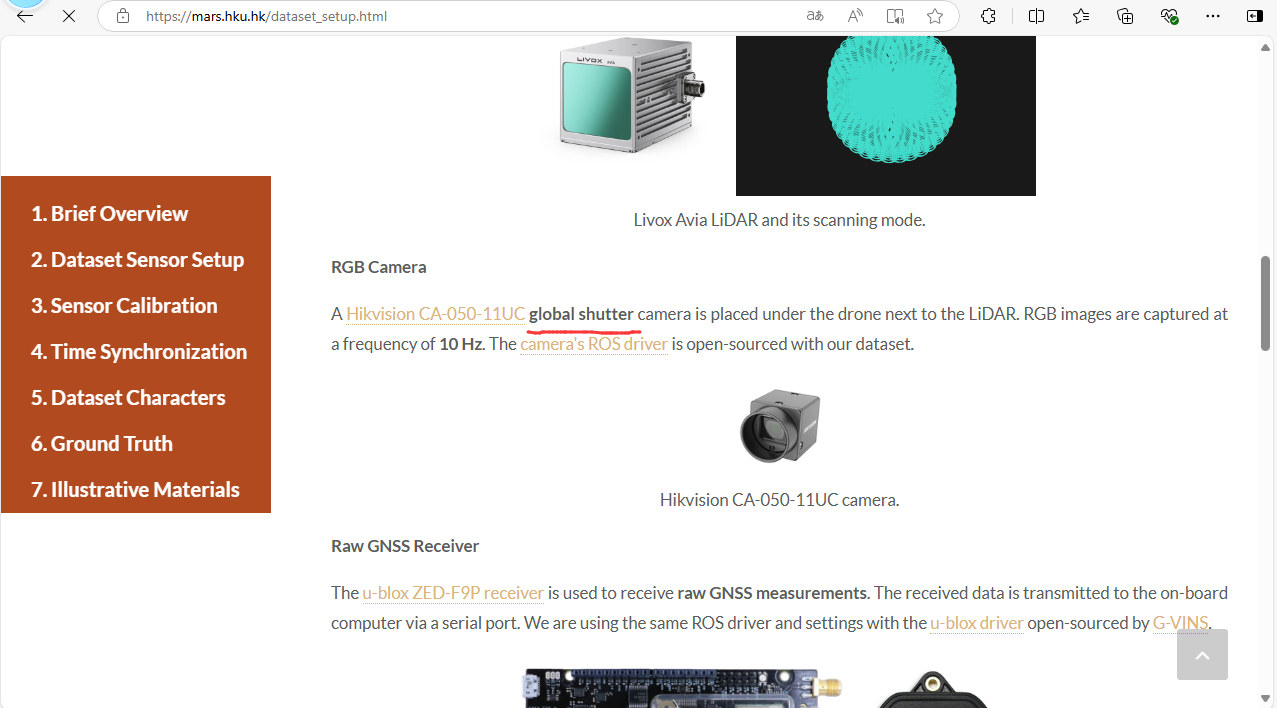
LVIG-dataset也是用的全局快门相机
https://mars.hku.hk/dataset_setup.html















 2375
2375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









