







 本文介绍了如何在Gazebo中使用图形界面创建world文件,通过拖放模型实现世界场景搭建,并详细展示了.sdf文件内容。学习者可以利用此方法简化world文件制作,加快仿真环境设置。
本文介绍了如何在Gazebo中使用图形界面创建world文件,通过拖放模型实现世界场景搭建,并详细展示了.sdf文件内容。学习者可以利用此方法简化world文件制作,加快仿真环境设置。
下面是我在gazebo通过另存为得到的文件内容(另存为的时候默认选项是sdf,那就是sdf文件?),和普罗米修斯的world文件内容格式似乎是一样的
Simulator/gazebo_simulator/worlds/indoor_search.world · 阿木实验室/Prometheus - Gitee.com
<sdf version='1.6'>
<world name='default'>
<light name='sun' type='directional'>
<cast_shadows>1</cast_shadows>
<pose frame=''>0 0 10 0 -0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name='ground_plane'>
<static>1</static>
<link name='link'>
<collision name='collision'>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<surface>
<contact>
<collide_bitmask>65535</collide_bitmask>
<ode/>
</contact>
<friction>
<ode>
<mu>100</mu>
<mu2>50</mu2>
</ode>
<torsional>
<ode/>
</torsional>
</friction>
<bounce/>
</surface>
<max_contacts>10</max_contacts>
</collision>
<visual name='visual'>
<cast_shadows>0</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
</material>
</visual>
<self_collide>0</self_collide>
<enable_wind>0</enable_wind>
<kinematic>0</kinematic>
</link>
</model>
<gravity>0 0 -9.8</gravity>
<magnetic_field>6e-06 2.3e-05 -4.2e-05</magnetic_field>
<atmosphere type='adiabatic'/>
<physics name='default_physics' default='0' type='ode'>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
</physics>
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>1</shadows>
</scene>
<wind/>
<spherical_coordinates>
<surface_model>EARTH_WGS84</surface_model>
<latitude_deg>0</latitude_deg>
<longitude_deg>0</longitude_deg>
<elevation>0</elevation>
<heading_deg>0</heading_deg>
</spherical_coordinates>
<state world_name='default'>
<sim_time>43 238000000</sim_time>
<real_time>43 379036529</real_time>
<wall_time>1633530915 813842580</wall_time>
<iterations>43238</iterations>
<model name='ground_plane'>
<pose frame=''>0 0 0 0 -0 0</pose>
<scale>1 1 1</scale>
<link name='link'>
<pose frame=''>0 0 0 0 -0 0</pose>
<velocity>0 0 0 0 -0 0</velocity>
<acceleration>0 0 0 0 -0 0</acceleration>
<wrench>0 0 0 0 -0 0</wrench>
</link>
</model>
<light name='sun'>
<pose frame=''>0 0 10 0 -0 0</pose>
</light>
</state>
<gui fullscreen='0'>
<camera name='user_camera'>
<pose frame=''>5 -5 2 0 0.275643 2.35619</pose>
<view_controller>orbit</view_controller>
<projection_type>perspective</projection_type>
</camera>
</gui>
</world>
</sdf>那这样构建一个world只需要在图形界面insert 拖动就可以了,然后另存为world,再launch文件里面加载这个world,方便很多,QT似乎也有这样的图形拖动的方式。
本身从这篇也可以看到就是可以另存为world的。
Gazebo创建围墙并生成.world文件_TYINY的博客-CSDN博客年年年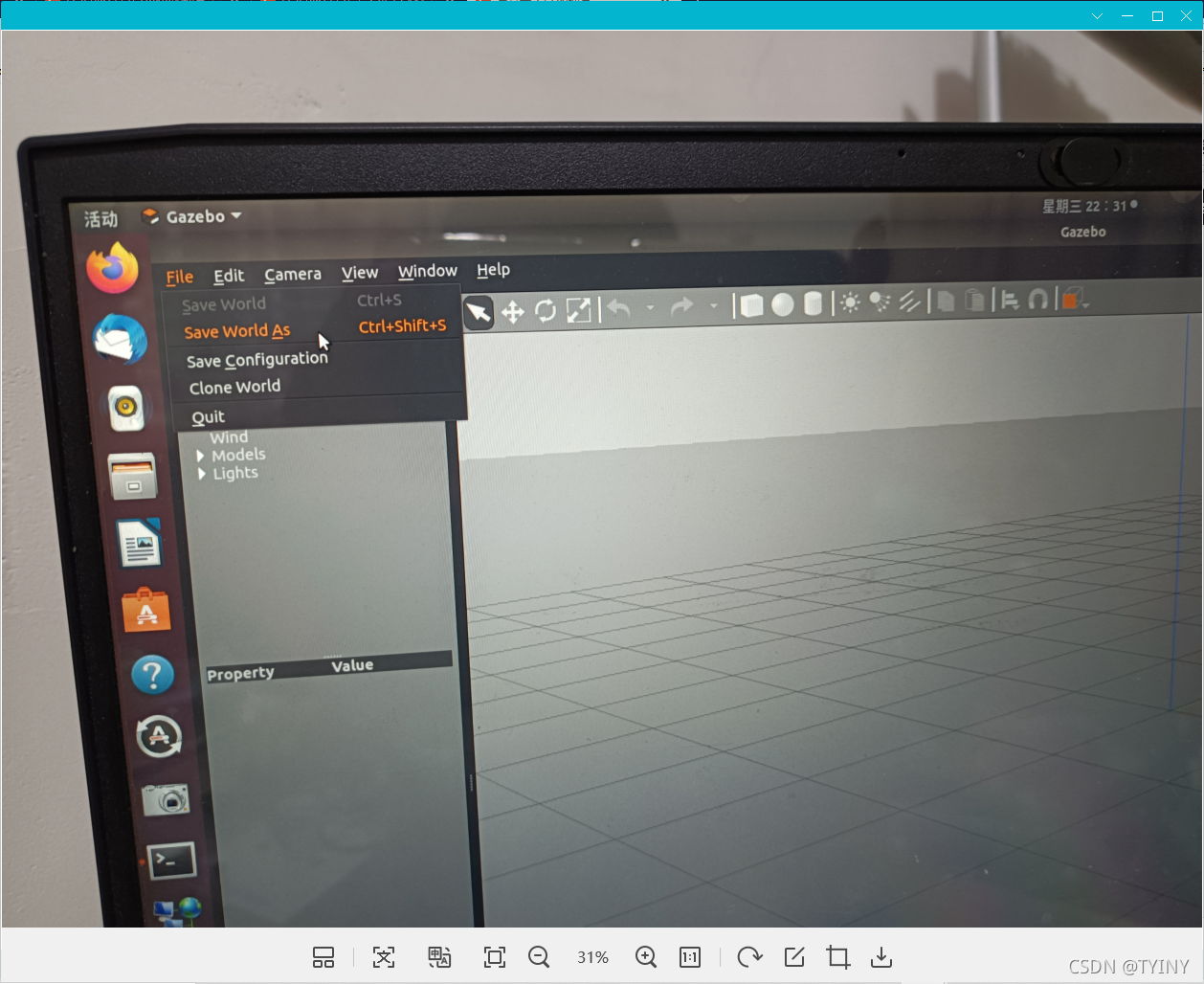


















 9276
9276

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











