










realsense的ros2功能包
GitHub - IntelRealSense/realsense-ros: Intel(R) RealSense(TM) ROS Wrapper for Depth Camera
我给别人装了下
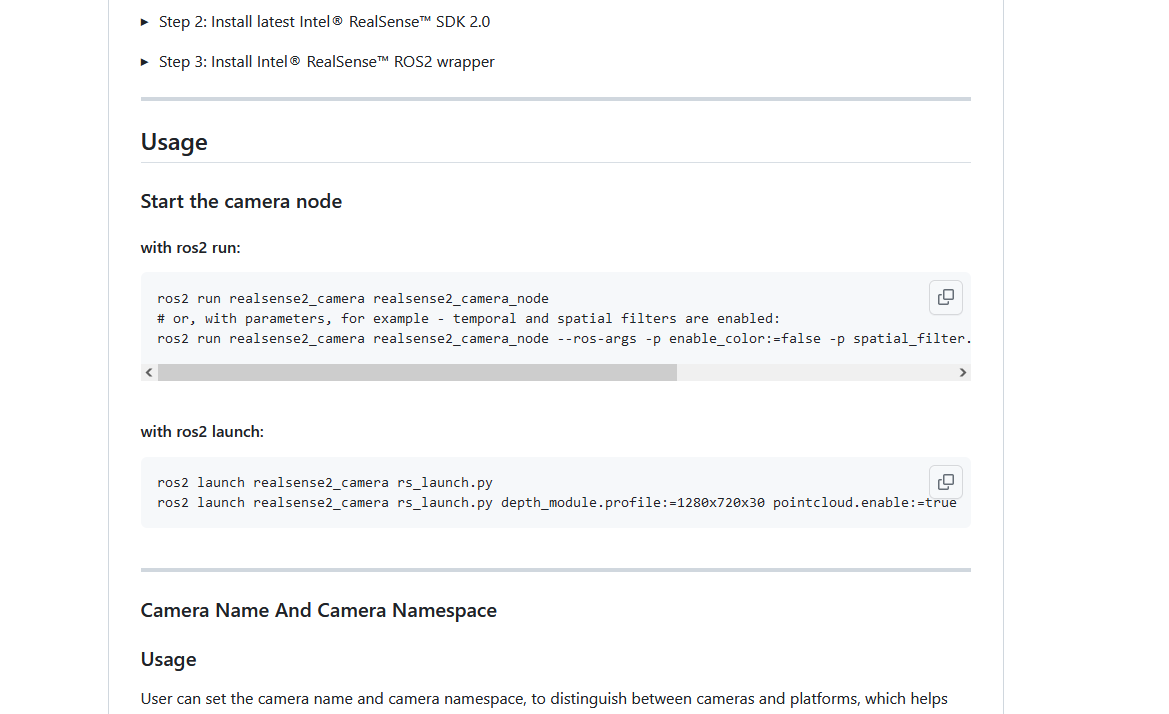
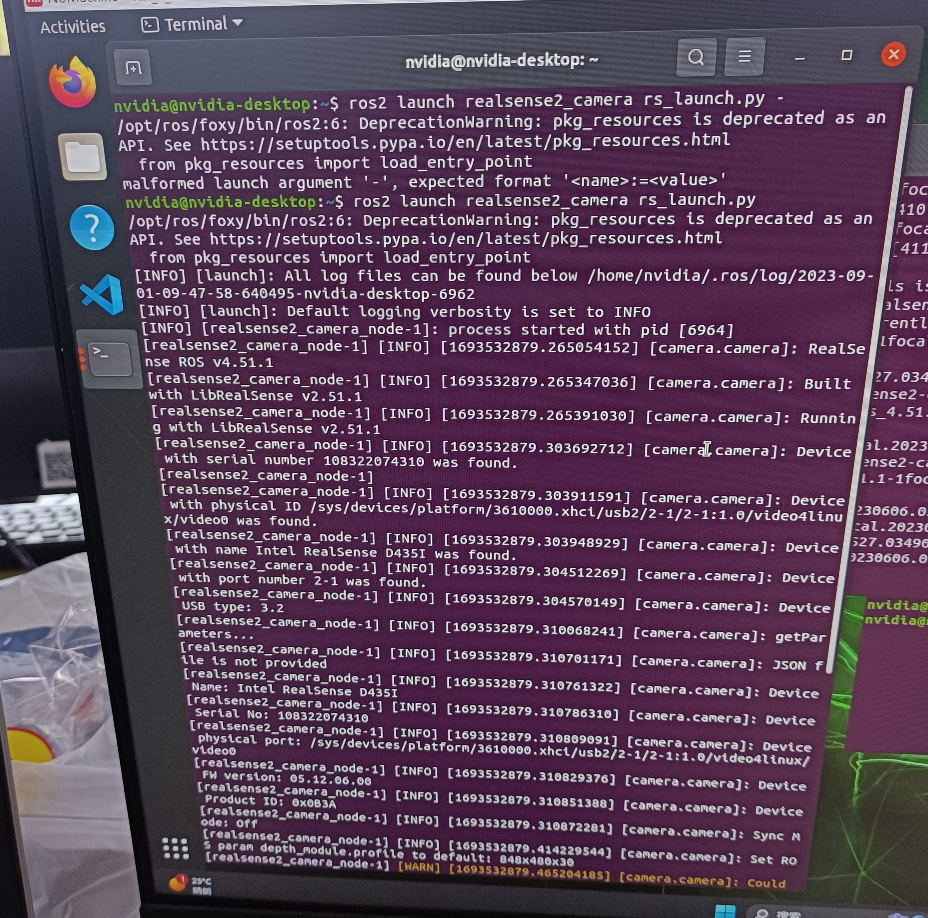
sudo apt-get install ros-foxy-realsense2-camera ros2 launch realsense2_camera rs_launch.py
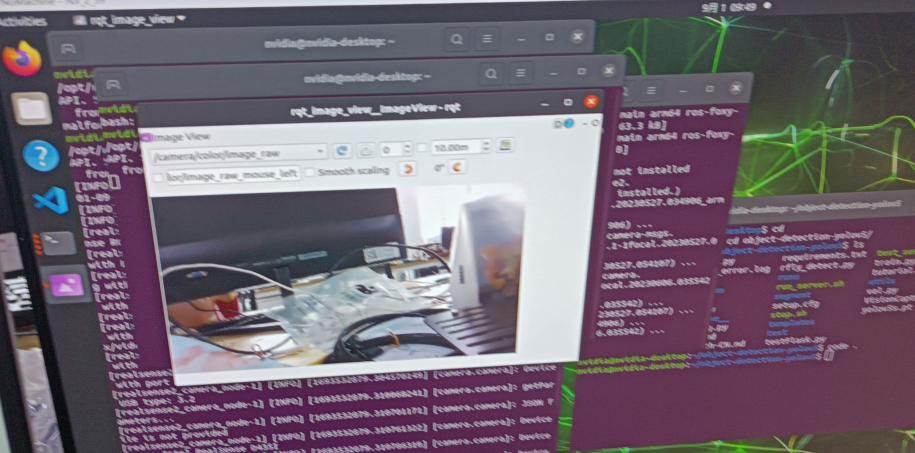
ros2打开rqt_image_view这么打开
查看D435i有哪些帧率和分辨率,用的命令:rs-enumerate-device
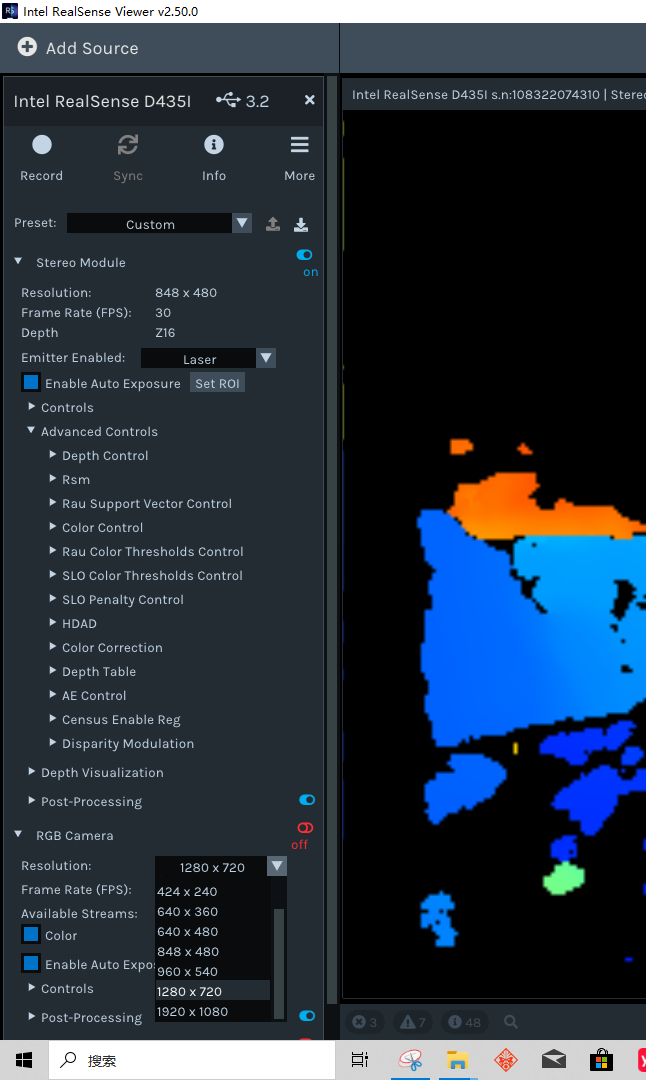
realsense-viewer也可以查看有哪些可选分辨率或者设置
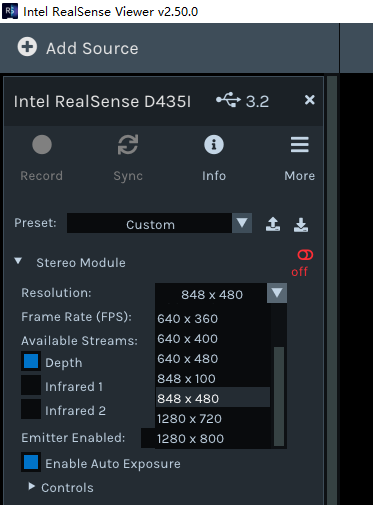
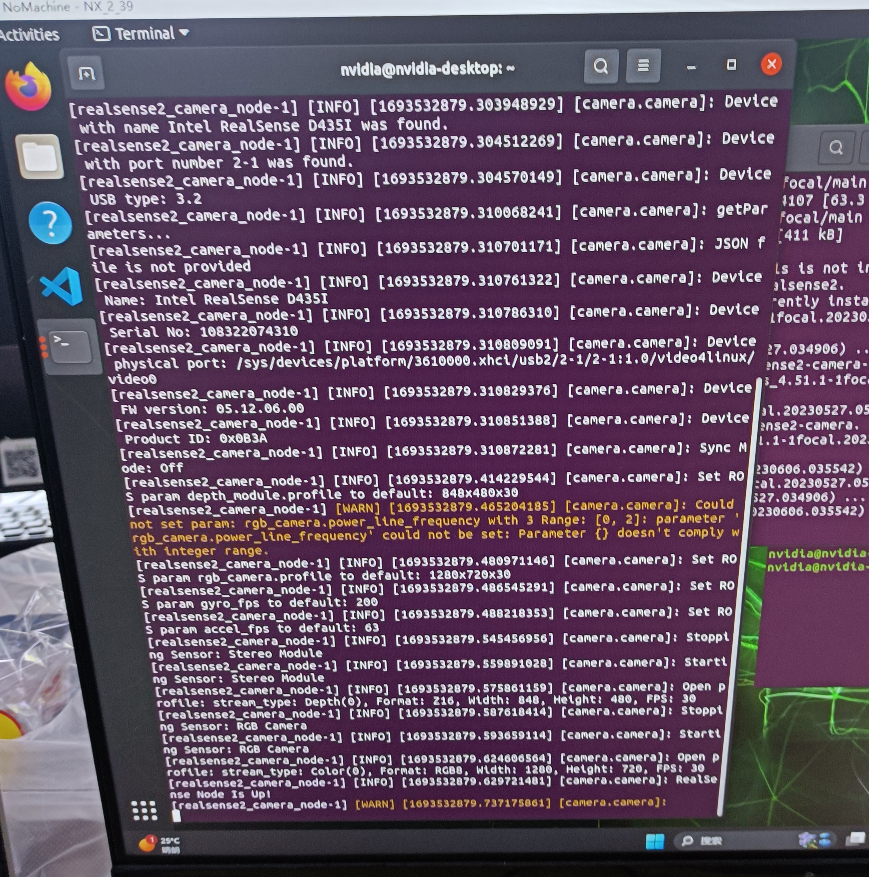
现在好像没有专门改灰度图分辨率的地方了,试了下,就是在改深度图分辨率的地方改灰度图分辨率也就是depth_module.profile这参数
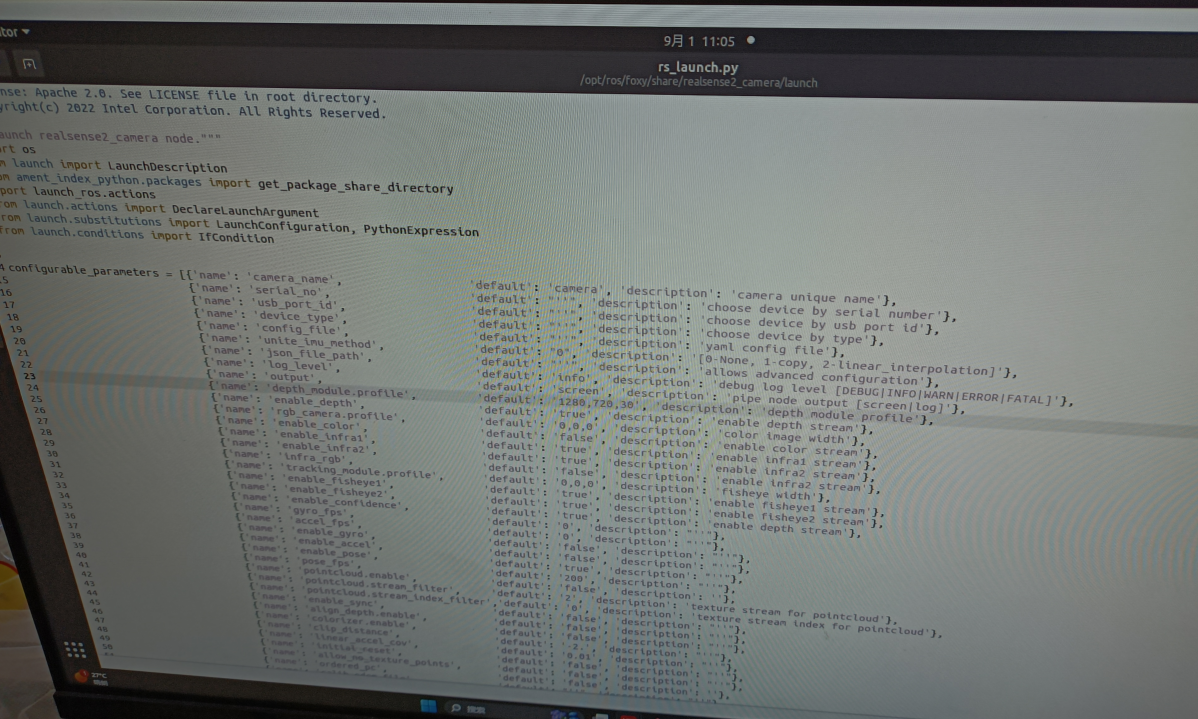
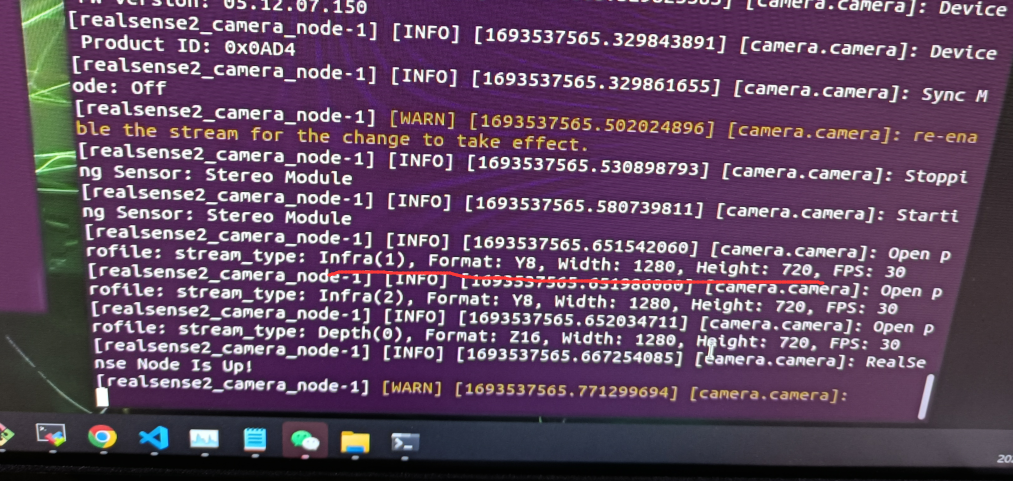
depth_module.profile改为1280,720,30之后,启动rs_launch.py,发出的灰度图的分辨率也是变为了1280*720了


















 8250
8250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











