







文章目录
系列专栏
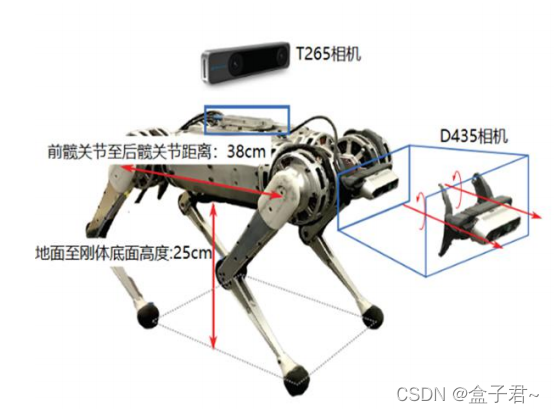
四足机器人MIT Cheetah mini专栏
足式机器人&机械臂控制合集专栏
机器人实战篇专栏
无刷电机FOC驱动的基本原理与设计涉及了多个关键组成部分,包括电机转子位置的采集、三相电流的变换采集及逆变换控制原理、电机控制电路原理、以及无刷电机三相逆变及缓冲原理等。这些组件协同工作,实现了对无刷电机高效而精确的控制,特别是在要求动态响应和高效率的应用中,如足式机器人,FOC显示出了其独特的优势。
提示:以下是本篇文章正文内容
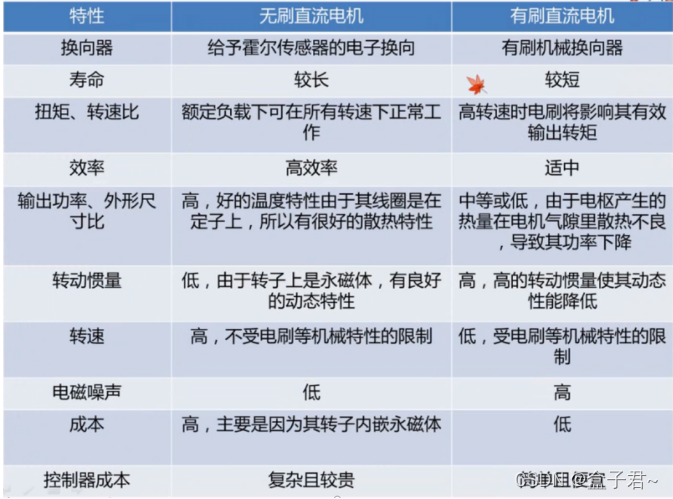
一、无刷直流电机的特点
1)高效率:效率>90%,功率和转矩密度高,功率因数几乎接近1
2)低压特性好、过载能力强、启动转矩大、启动电流小
3)没有换向器等,用电子换向代替,【防盗标记–盒子君hzj】磁极使用稀土材料,体积小
4)转速精度高
.
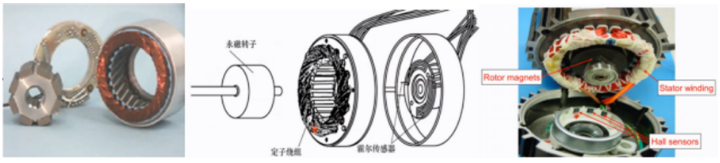
二、无刷直流电机的种类
(1)外转子无刷直流电机【永磁体在外面】

(2)内转子无刷直流电机【永磁体在里面】
.
三、无刷直流电机的驱动电路原理分析
(1)控制整体流程图
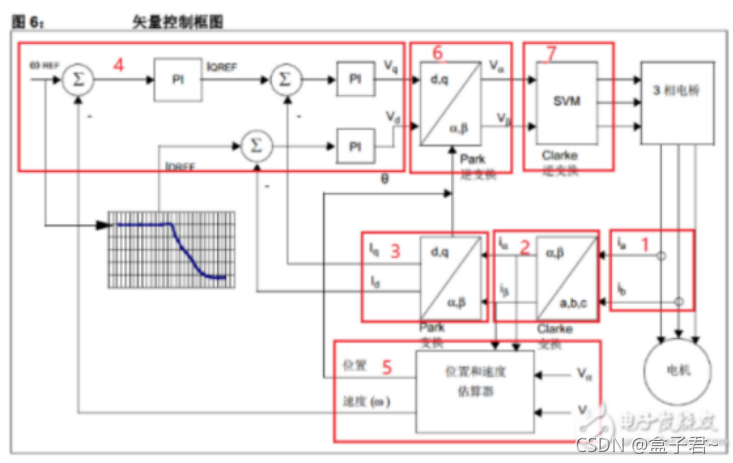
(2)三相逆变电路及原理分析【控制流程图中的第7部分详解】
三相逆变电路是FOC的最终执行模块
原理
三相逆变器控制六个MOS管将直流逆变为三相交流电,当三相直流电机的三相分别通以相差120°的正弦电压时(换流的过程,也称电子换向过程), 从而迫使线圈定子磁状态发生改变,在电机气隙中产生跳跃式的旋转磁场。
三相逆变器常用的有两种:半桥式搬控型和全桥式全控型,每个桥臂都有一个电子开关,小功率电机可以选择三极管,MOS管,大功率电机选择IGBT。(一般在电子开关上可以并联一个续流二极管,也可以不需要)
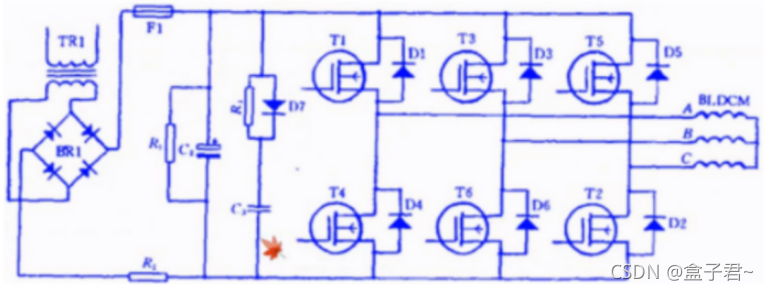
(1)整流电路:
有变压器TR1和整流桥BR1组成,将交流电源转换位直流电,如上图所示。
(2)滤波电路:
实现直流电源的低通滤波,形成低内阻硬持性直流电压源,同时于绕组感性负载交换无功功率,其功能有大点用C2实现,,如上图所示。
(3)缓冲电路:
为了减少开关管承受的尖峰电压,有R3、C3、D7组成的RDC缓冲电路,缓冲容C3选用高频特性好的无感电容,要得上开关管的开关频率,D7选用过渡正向电压低,反向恢复时间短的快速恢复二级管,如上图所示。
(4)驱动放大电路(驱动芯片IC):
脉宽调制的PWM信号经过驱动电路放大送至各种功率的三相逆变器,如上图所示。
(5)逆变电路:
功率开关管T1T6、续流二级管D1D6;功率开关管一般选择功率MOSFET\IGBT\GTR\GTO,甚至可以选择只能功率模块IPM,开关管的种类不同对驱动的信号也不同,如上图所示。
(6)三相UWV定子绕组的连接方式选择原则:
1)绕组利用率:三相绕组优于四相绕组和五相绕组
2)转动脉动:相数越多,转动脉动越小,成本越高
故星形连接三相桥式电路应用最广泛
.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8291
8291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











