







 本文介绍了统计量如最大值、最小值等在机器人位姿估计中的应用,重点强调了RMSE在绝对轨迹误差(ATE)和相对位姿误差(RPE)中的使用。提到Evo默认计算ATE,而使用RMSE时则对应ATERMSE。
本文介绍了统计量如最大值、最小值等在机器人位姿估计中的应用,重点强调了RMSE在绝对轨迹误差(ATE)和相对位姿误差(RPE)中的使用。提到Evo默认计算ATE,而使用RMSE时则对应ATERMSE。
统计量一般包含( https://www.zhihu.com/question/485606304/answer/2111805839):
最大值(Max)
最小值(Min)
均值(Avg或Mean)
中位数(Median)
标准差 (Std)
均方根误差(RMSE)
只是这么多统计量里面,我们一般选用RMSE。
ATE: absolute trajectory error 绝对轨迹误差
绝对轨迹误差是估计位姿和真实位姿的直接差值,可以非常直观地反应算法精度和轨迹全局一致性。
建议使用RMSE统计ATE
RPE: relative pose error 相对位姿误差
建议使用RMSE统计 RPE
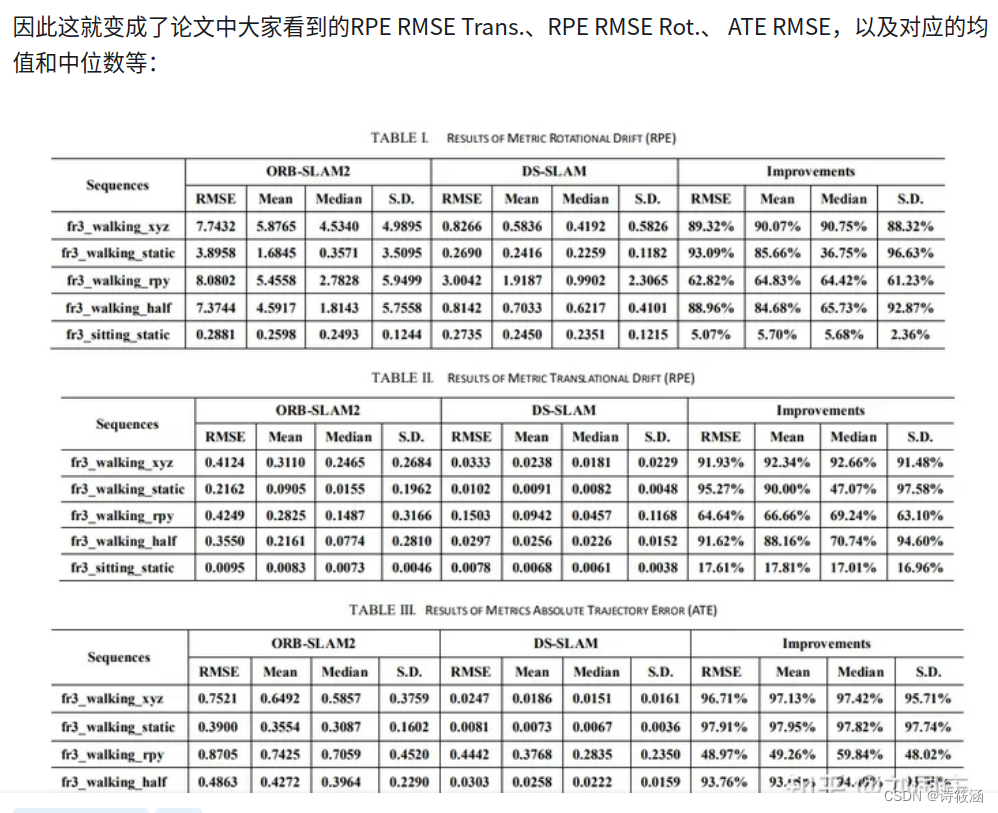
所以很多论文里面轨迹精度评价指标是叫ATE RMSE和RPE RMSE,注意不是单单的就一个RMSE。
https://journal.ecust.edu.cn/cn/supplement/a2427cfe-bb97-4837-91be-05831bfe965b
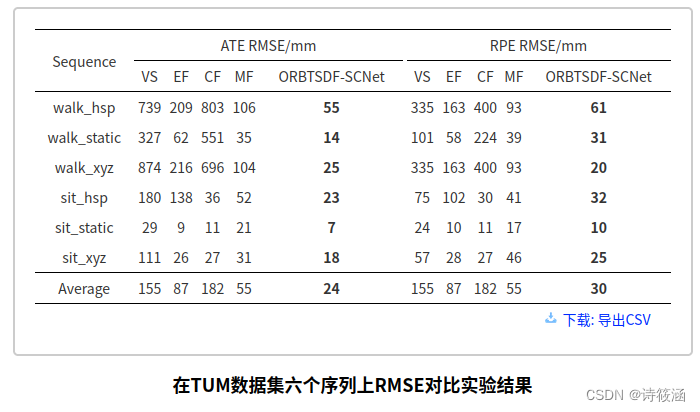
清楚了有上面那么多种统计量之后,再看到有的论文里面的精度对比表格是这样,也应该可以看得很清晰了。
https://www.zhihu.com/question/485606304/answer/2111805839
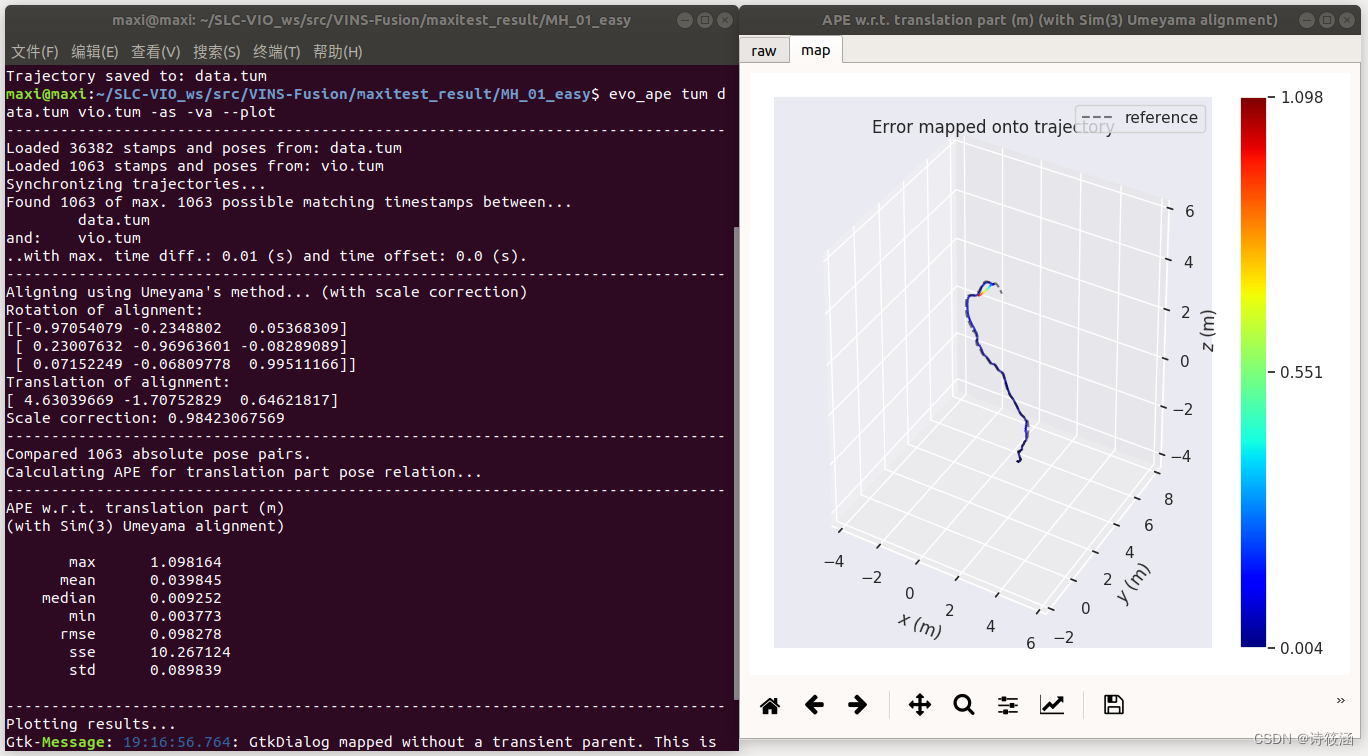
清楚了上面那些,再看evo的结算结果就清晰了,可以看出evo默认算的是ATE的,你用的RMSE也是ATE RMSE。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











