






宇树开源整理(1) - 概览
原创 Jim Li Jim聊聊AI 2025年03月13日 09:32 广东
前言
具身智能是下一个科技领域的风口,造出一个类人的AGI机器人是众多人的梦想。这两年机器人的“小脑”—运动控制进展神速,能上春晚扭秧歌,也能像人一样奔跑,已经不再是当年走起来一瘸一瘸的机器人了,并且随着逐步量产,价格已经来到万级别。本着对机器人核心技术的好奇心,决定深挖一下宇树的开源技术,期望能有些系统性的收获。这篇文章先来整体看看开源代码都有哪些,以及简单介绍下当前正在发售的几款人形和四足机器人。
开源仓库分析
| 排名 | 仓库名称 | 仓库介绍 | Star 数量 |
|---|---|---|---|
| 1 | unitree_rl_gym | 基于 NVIDIA Isaac 的强化学习示例,支持 Go2、H1、G1 机器人。 | 1516 |
| 2 | unitree_ros | ROS 仿真包,包含所有 Unitree 系列机器人的 URDF 文件,支持 G1,提供质量、惯性等物理参数。 | 767 |
| 3 | avp_teleoperate | 使用 Apple Vision Pro 远程操作 Unitree G1 和 H1_2 机器人。 | 677 |
| 4 | unitree_guide | 基于书籍《四足机器人控制算法 —— 建模、控制与实践》的实例控制算法,支持仿真和真实环境开发。 | 373 |
| 5 | unitree_legged_sdk | 用于 Aliengo、A1、Go1、B1 机器人的真实环境开发 SDK。 | 332 |
| 6 | unitree_mujoco | 使用 Mujoco 作为模拟器,支持 C++/Python 接口,集成地形生成器,实现仿真到真实迁移。 | 326 |
| 7 | point_lio_unilidar | 适配 Point-LIO 激光惯性里程计算法,使用 Unitree L1 激光雷达实现 SLAM。 | 277 |
| 8 | unitree_sdk2 | 用于 Go2、B2、H1、G1 机器人的真实环境开发 SDK。 | 252 |
| 9 | unitree_IL_lerobot | 使用 G1 双臂进行数据收集、训练和测试,基于改进的 LeRobot 开源框架。 | 168 |
| 10 | unitree_ros2 | 在 ROS2 环境中开发 Go2 和 B2 机器人,接口类型与 unitree_sdk2 一致。 | 196 |
| 11 | unitree_sdk2_python | unitree_sdk2 的 Python 接口。 | 121 |
| 12 | unitree_model | 提供机器人 3D 模型,包含 xacro 和 URDF 文件,适用于不同环境。 | 39 |
| 13 | kinect_teleoperate | 使用 Azure Kinect DK 相机远程操作 Unitree H1 机器人。 | 42 |
| 14 | unitree_actuator_sdk | 机器人执行器(如电机)的 SDK。 | 61 |
| 15 | unilidar_sdk2 | Unitree L2 激光雷达的 SDK。 | 12 |
| 16 | z1_ros | Z1 机器人的 ROS 仿真包。 | 23 |
说明:
-
按 Star 数量降序排列,数据截至文档日期:2025-03-13。
-
总计 32 个仓库,但仅展示了其中的 16 个仓库。
人形机器人介绍
| 机器人名称 | 感知传感器 | 控制计算单元 | 开发计算单元 | 总自由度(单腿/单手臂) |
|---|---|---|---|---|
| Unitree H1 | 3D激光雷达(MID-360) + 深度相机(D435) | Intel Core i5-1235U | Intel Core i7-1255U/1265U | 5/4 |
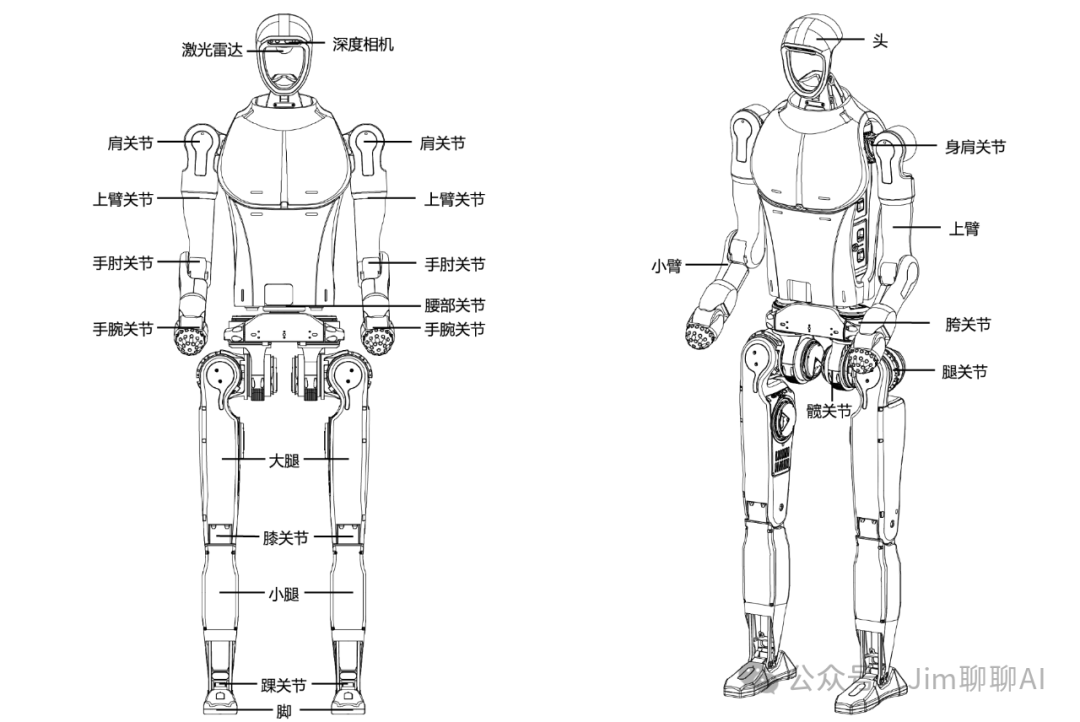
| Unitree H1-2 | 3D激光雷达(MID-360) + 深度相机(D435) | Intel Core i5-1235U | Intel Core i7-1255U/1265U | 6/7 |
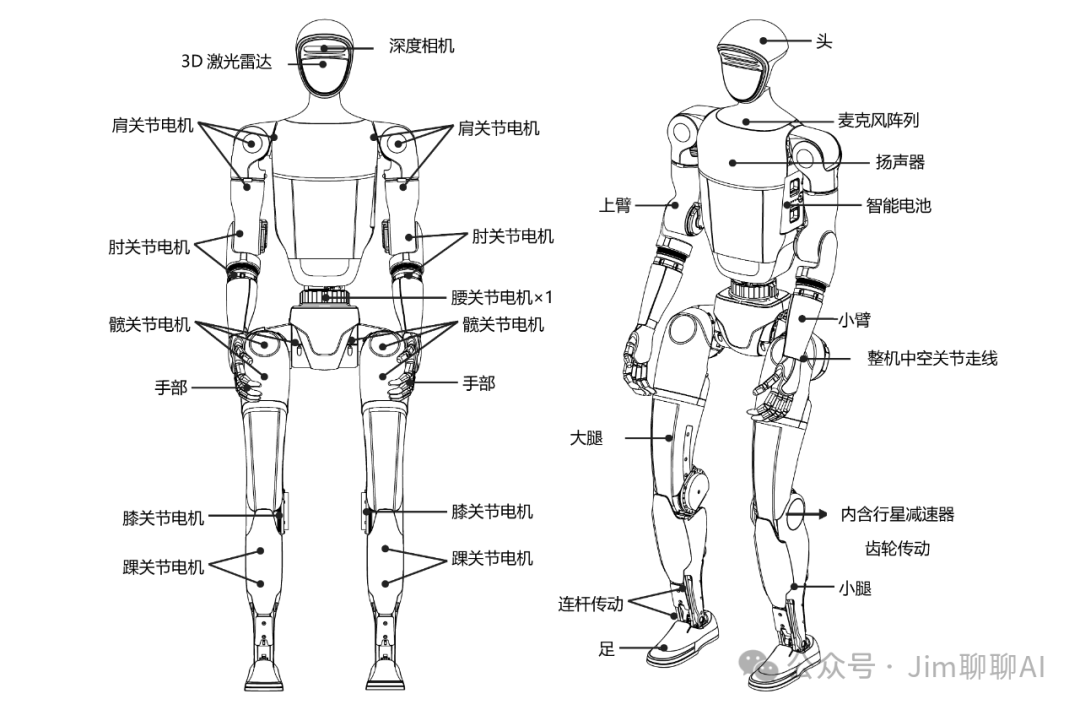
| Unitree G1 | 3D激光雷达(MID-360) + 深度相机(D435i) | - | Jetson Orin NX | 6/5 |
-
【运控计算单元】为 Unitree 运动控制程序专用,不对外开放。开发者仅可使用【开发计算单元】进行二次开发。
Unitree H1-2部件图
Unitree G1部件图
四足机器人介绍
| 机器人名称 | 感知传感器 | 控制计算单元 | 开发计算单元 | 自由度 |
|---|---|---|---|---|
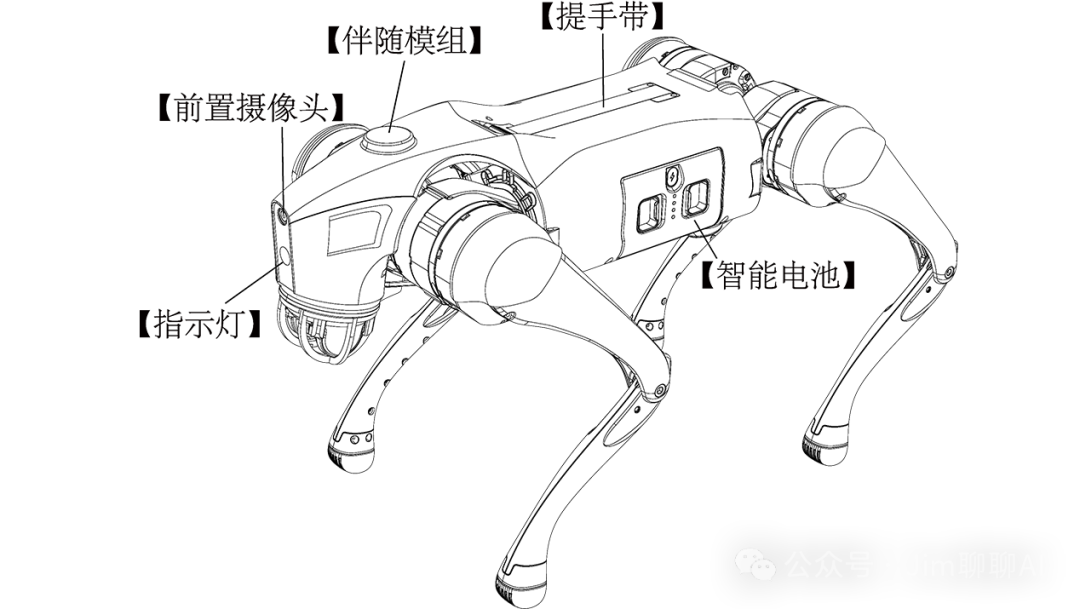
| Unitree Go2 | 3D激光雷达(MID-360+禾赛XT16) + 深度相机(D435i) | 8核高性能CPU | Orin(EDU版) | 12 |
| Unitree B2 | 3D 激光雷达 ×1+ 深度相机 ×2+ 光学相机 ×2 | Intel Core i5 | Intel Core i7 | 12 |
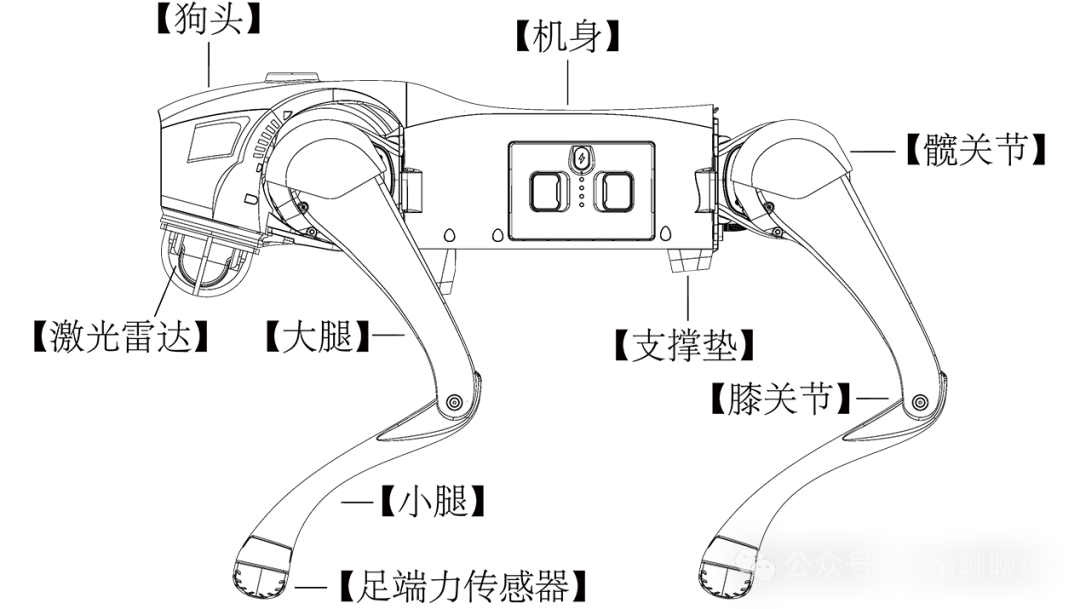
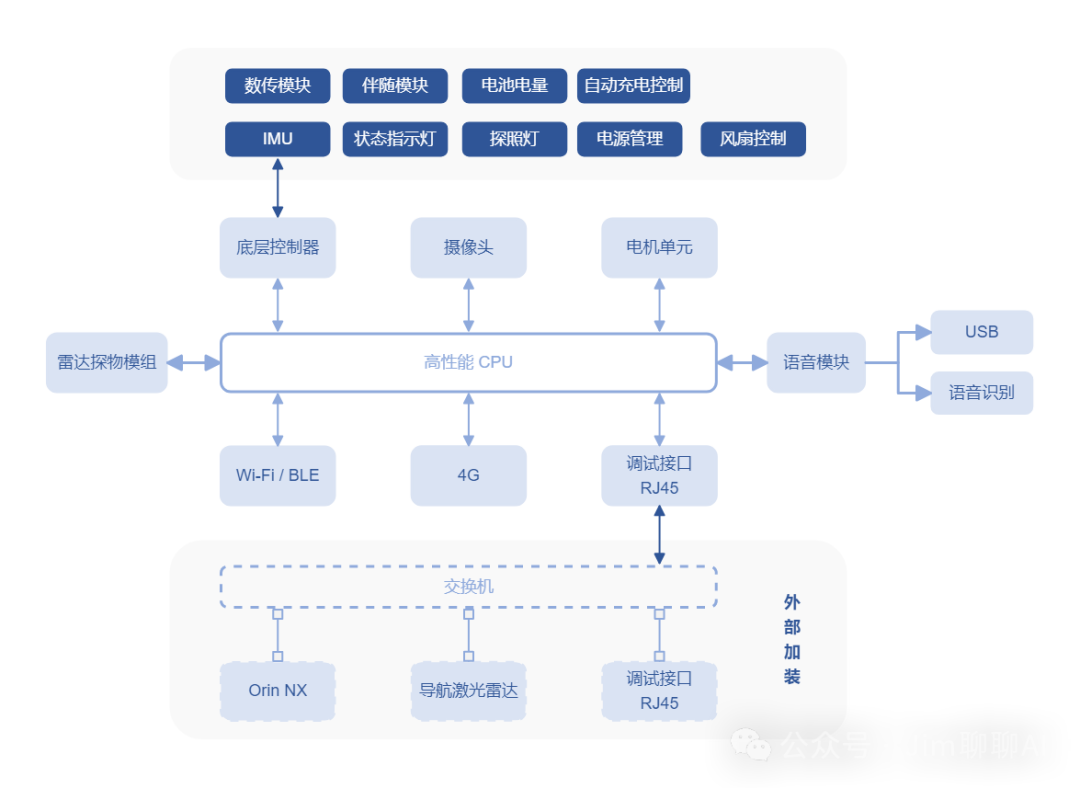
Unitree Go2部件图
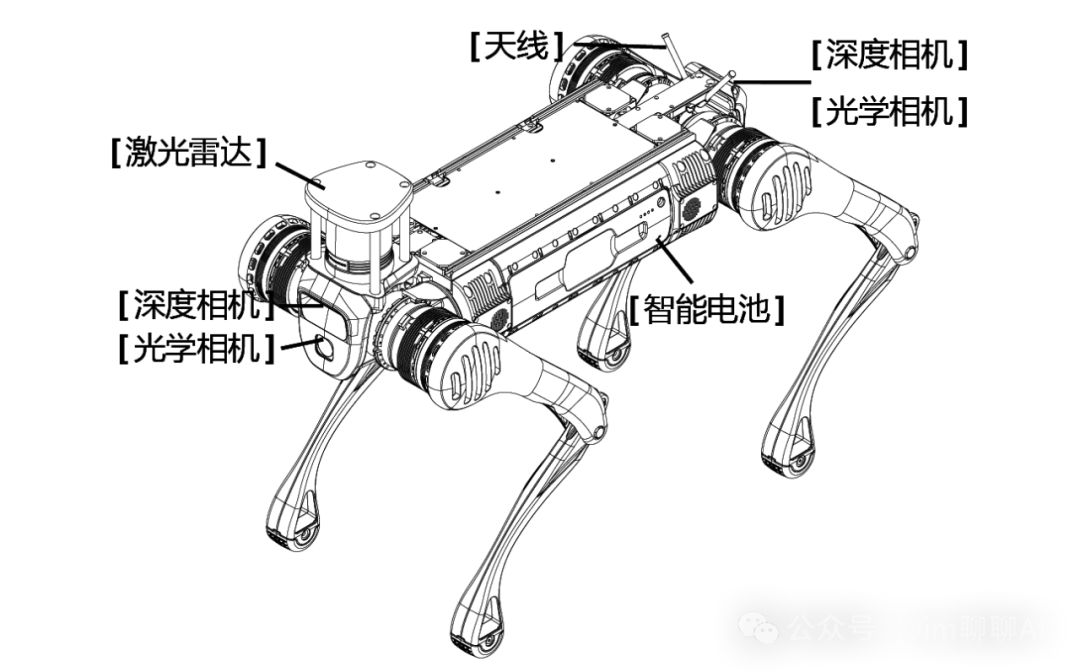
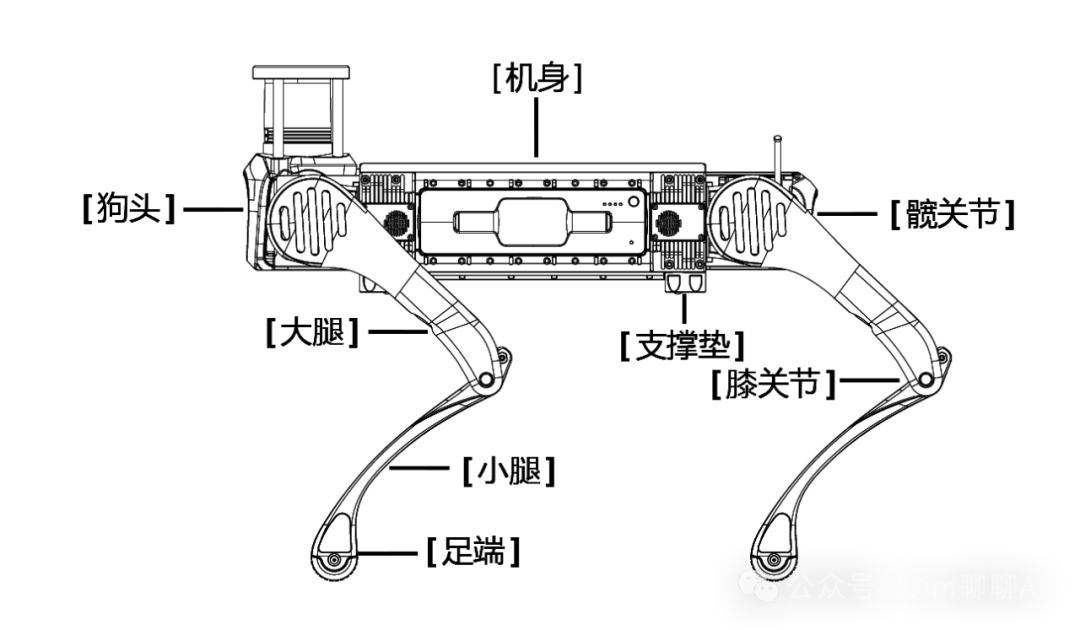
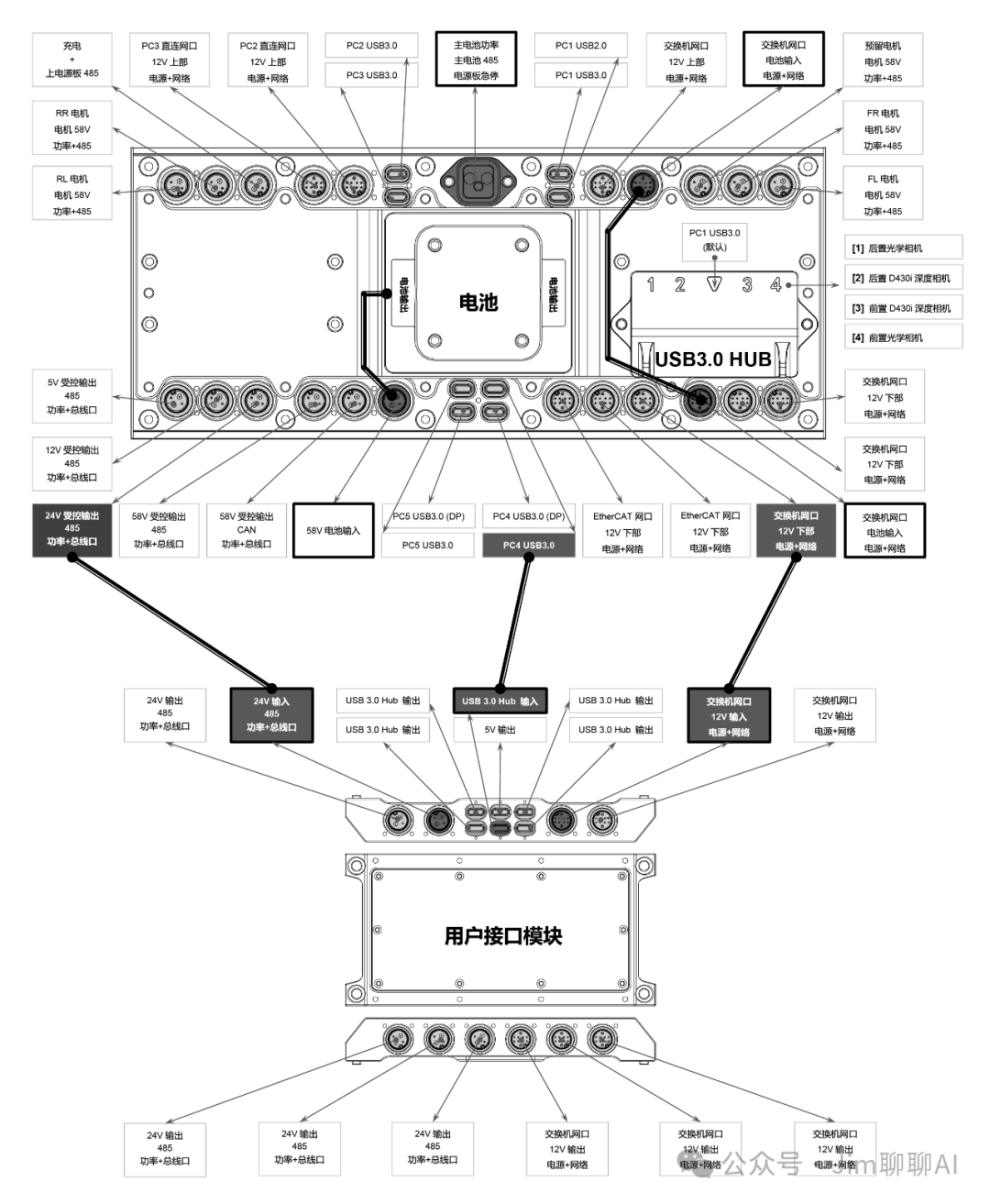
Unitree B2部件图
参考资料
-
https://support.unitree.com/home/zh/developer
-
https://github.com/unitreerobotics


















 588
588

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











